
















Parking Sensor based on geomagnetic variations of vehicle
- Wireless geomagnetic vehicle sensor
- Parked vehicle detection algorithm
- Autonomous driving
- Geomagnetism detection element
- Engine section detection algorithm
In this paper, we discuss about vehicle detection technique for the Parking Sensor. Previous technique like electromagnetic induction loop coil, Ultrasonic sensor and Image processing has a problem such as restriction on installation conditions, and taking time for installation.
Our sensor made it possible to solve these problems using geomagnetic sensor. We developed wireless sensor with low power design method, and original algorithm for high accuracy. This algorithm uses a features that vehicle’s engine has a large effect on magnetic field, and uses a subsequent magnetic field variation. In result of experiment that tested 615 vehicles, we could get 100% accuracy.
It is possible to provide information on space availability in a parking lot. In additional, this sensor will be able to provide new value on autonomous driving or shared service.
1. Introduction
In recent years, the systems for providing drivers with various road information and for exchanging information between roads and vehicles toward the realization of an autonomous driving society have become increasingly sophisticated. One such system provides information on the congestion situation of parking lots and guides users to empty spaces on a real-time basis. This system is intended for highway rest stops and parking lots in urban areas (such as metered parking lots and apartment building parking facilities). It not only reduces the disparity in congestion by providing drivers with information on the congestion situation of parking lots and vacant parking spaces, but also may lead to the acceleration of future parking-sharing services and the realization of an autonomous driving society.
In order to realize this system, the sensor needs not only to determine information on the availability of a parking lot and individual parking spaces, but also to facilitate easy installation and maintenance. There are the following three types of sensors which detect vehicles parked in individual parking spaces: Loop coil type 1), ultrasonic type, and image type 2) 3). The loop coil type and ultrasonic type sensors have high vehicle detection accuracy, as well as an affinity for the aforementioned information delivery system, but are difficult to be installed because they require digging of the road surface and the mounting of an arm for installation and wiring. It is difficult for them to respond flexibly to changes in parking spaces. The image type sensor enables the detection of multiple parking spaces with only one camera but has a problem in that it requires parameter adjustment at the time of installation, as well as maintenance owing to poor environmental resistance.
On the other hand, in recent years, promotion of the reduction in size and power consumption of sensor and radio elements, as well as a reduction in size and the extension of the life of batteries has made it possible to perform sensing in a completely wireless environment. Based on such technical progress, we worked on the development of a wireless geomagnetic vehicle sensor utilizing a power-saving geomagnetism detection element.
A geomagnetism detection element is a sensor that detects changes in the earth’s magnetism and its peripheral magnetic environment based on the magnetic flux density, and utilizing this property enables the detection of surrounding magnetic bodies. In addition, the MI element (Magneto Impedance Sensor) used in this development, which has higher sensitivity than other elements that can also measure magnetic flux density such as Hall element and MR (Magneto Resistive) element, can detect the movement of a magnetic body located as far as the vehicle height above the ground from a sensor installed on a road surface as a change.
In this paper, Chapter 2 explains the configuration of the wireless geomagnetic vehicle sensor mounted in this development and Chapter 3 describes the basic algorithm for detecting a vehicle from the output of the geomagnetism detection element simply based on the magnitude of variation, as well as related problems. Chapter 4 explains the algorithm for detecting the variation of vehicle-specific magnetic fields which was devised to solve this problem, and Chapter 5 reports on the results of the field experiment conducted using the wireless geomagnetic vehicle sensor implementing this algorithm.
2. Sensor configuration
This chapter describes the configuration of the wireless geomagnetic vehicle sensor implemented in this development.
This sensor, which is intended to be installed on the road surface of a parking space, is designed to have an impact-resistant housing that will not break even when it is run over by a vehicle. In order to resist the impact of a vehicle, the housing is designed to be 40 millimeters thick and 300 millimeters square. Fig. 1 shows its external appearance.

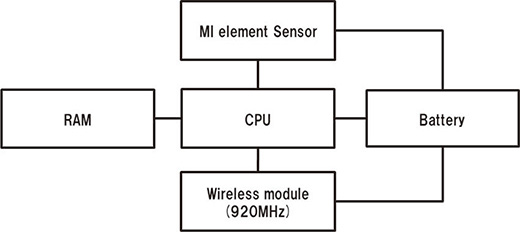
In addition, Fig. 2 shows the block diagram of the sensor configuration. In this housing, a geomagnetism detection element, a processing CPU, a radio substrate and a built-in battery are placed. The geomagnetism detection element, processing CPU and radio substrate are configured to be driven by the built-in battery. This achieved completely wireless connection and downsizing, eliminated the need to wire a power supply for data acquisition and made a sensor with enhanced ease of installation. Furthermore, although not described in this paper, we also added a function to track minor noises in the periphery, secular changes in the geomagnetism and a wireless reset function, as well as made efforts to enhance the maintainability.
3. Basic algorithm and related problem
3.1 Basic algorithm
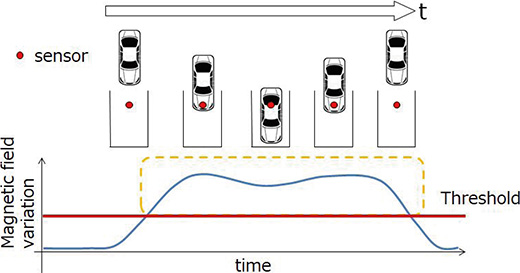
Magnetic flux density represents vector quantity, and the geomagnetism detection element uses the scalar quantities in three axial directions as individual outputs. This wireless geomagnetic vehicle sensor calculates the absolute values of the vectors from the values of these three axes for use. In the basic algorithm, considering the situation where there is no vehicle in a parking space as a standard  , a vehicle is determined to be parked when the magnitude of “magnetic field variation amount (
, a vehicle is determined to be parked when the magnitude of “magnetic field variation amount (  ),” which is the difference value from the magnetic flux of the density geomagnetism at the time of measurement (
),” which is the difference value from the magnetic flux of the density geomagnetism at the time of measurement ( ), exceeds a certain level. Where,
), exceeds a certain level. Where,  is expressed as follows:
is expressed as follows:

Fig. 3 shows the change in “magnetic field variation amount” when a vehicle is parked in a parking space and the determination results in the basic algorithm. We set a threshold for a given value so that “a vehicle” is detected when this value is equal to or higher than the threshold.
3.2 Problem with the basic algorithm
Fig. 4 shows the outline of the quantitative study of the magnetic field variation amount conducted in this development.
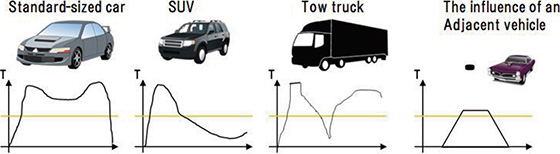
The basic algorithm originally simulated a vehicle for which the magnetic field variation exceeds the threshold in any part, like a “standard-sized car” shown on the far left in Fig. 4. However, there were vehicles such as “SUV” and “tow truck” for which the magnetic field variation was lower than the threshold in some parts. Furthermore, like “the influence of an adjacent vehicle” shown on the far right, there were also cases where the magnetic field variation exceeded the threshold owing to extraneous effects, even when there was no vehicle parked in the parking space which was a subject for detection. Therefore, there was the problem that there were types of vehicles which could not be detected by this algorithm.
3.3 Issues
It was necessary to simultaneously solve the following two problems: the problem where the magnetic field variation was lower than the threshold in some parts of vehicles and they could not be detected as described in the previous paragraph, and the one where some types of vehicles which were parked in adjacent parking spaces were mistakenly detected as vehicles parked in parking spaces which were the subjects for detection.
In this development, since the engine and motor contain a high proportion of iron, which is a magnetic body, we adopted an algorithm focused on the determination of this significant magnetic field variation, paying attention to the fact that the engine section has significant influence on the magnetism in any vehicle. In addition, we set the goal of recognizing of vehicle-specific magnetic field variation by tracking the amounts of subsequent magnetic field variations to discriminate a vehicle parked in a parking space equipped with a sensor which is a subject for detection and a vehicle parked in an adjacent parking space which is not a subject for detection, and made efforts to solve it.
4. Parked vehicle detection algorithm
4.1 Engine section detection algorithm
As stated above, the “magnetic field variation amount” varies depending on the vehicle type and section of a vehicle. However, the engine section shows a “magnetic field variation amount” that far exceeds that of a vehicle parked in an adjacent parking space, regardless of vehicle type. The sensor is to be placed at one-third length from the front of a parking space.
Concerning the relationship between the vehicle entry method and the magnetic field variation, Fig. 5 shows “forward entry” and Fig. 6 shows “backward entry” and “pass-through entry.” As Fig. 5 shows, in the pattern of “forward entry” where a vehicle enters into a parking space by forward movement and leaves by backward movement, the engine section passes above the sensor before a vehicle is parked at the time of entry and the engine section passes above the sensor again at the time of leaving. In both patterns of “backward entry” where a vehicle enters a parking space by backward movement and leaves by forward movement as shown in the upper part of Fig. 6, and “pass-through entry” where a vehicle enters into a parking space by forward movement and also leaves by forward movement as shown in the lower part of Fig. 6, the engine section comes directly above the sensor when the vehicle is completely parked. In this way, there is a time when the engine section necessarily passes above the sensor when a vehicle is parked in a parking space. Focusing on this point, we devised an algorithm for detecting a significant change in the engine section, which has the following two thresholds: full threshold and vacant threshold.
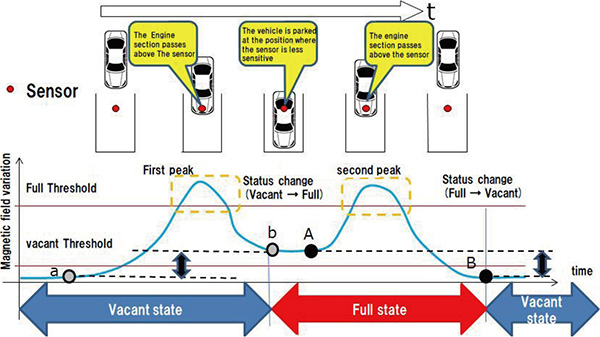
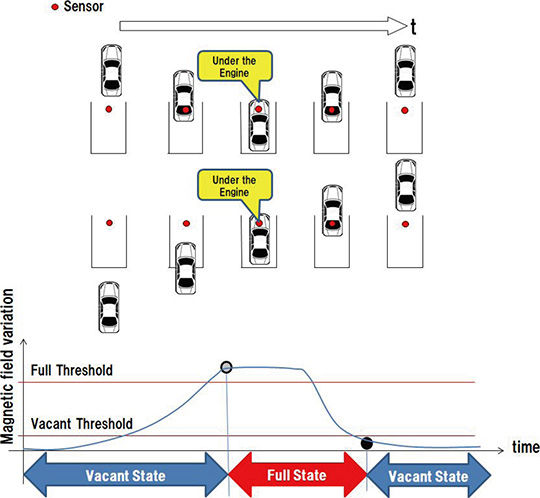
In the case of “forward entry,” a change exceeding the full threshold is shown in the engine section, and the amount of magnetic field variation from the initial state is a low value “A,” which is between the vacant threshold and the full threshold during parking. If a magnetic field variation amount above a certain level is shown after a change exceeding the full threshold, this algorithm determines this state as the vehicle detected state. In the case of leaving, a change exceeding the full threshold is shown again owing to the influence of the engine section, and the magnetic field variation amount becomes value “B,” which is smaller than the value “A” during parking after a vehicle leaves completely. If value “B” is smaller than the vacant threshold, or if there is a certain amount of change before or after (A–B) a change exceeding the full threshold from the vehicle detected state, if any, this algorithm cancels the vehicle detected state.
In the case of “backward entry” and “pass-through entry,” the full threshold is constantly exceeded until a vehicle leaves after its entry, and the state is determined as the vehicle detected state after a certain period of time. In addition, since the value also goes below the vacant threshold at the time of leaving, the vehicle detected state is canceled.
4.2 Effect
This algorithm solves the two issues described in Chapter 3 simultaneously. In the case of vehicles showing a small magnetic field variation amount lower than the threshold in some parts of vehicles such as “SUV” and “tow truck,” the basic algorithm made it possible to continue the vehicle detected state until the engine section is detected at the time of leaving even if the magnetic field variation amount at the time of parking was small, by detecting the large magnetic field variation amount in the engine section. In addition, although the basic algorithm caused a detection error when a vehicle with strong influence parked even if there was no vehicle parked in the parking space which was a subject for detection, this algorithm made it possible to eliminate such exceeding of the threshold owing to extraneous influence, because the response to it is smaller than that to the influence of the engine section.
5. Experimental results
5.1 Experimental conditions
For use in the detection of a vehicle in a parking space, various parking patterns need to be assumed. The experiment of this wireless geomagnetic vehicle sensor was conducted on the following three parking patterns: (1) Forward parking, (2) Backward parking and (3) Pass-through parking. “Pass-through parking” refers to the situation where a vehicle is parked after passing through one parking space which has no separator line at its front and rear such as a parking lot of a rest stop. The following ten types of vehicles were subject to this experiment: minicar, compact car, minivan, sedan, wagon, SUV, van, truck, EV and electric car. Table 1 shows the breakdown of the respective car types.
| Vehicle type | No. of vehicle types (Types) | No. of tests (Times) | No. of forward parking tests (Times) | No. of backward parking tests (Times) | No. of passthrough parking tests (Times) |
|---|---|---|---|---|---|
| Electric car | 3 | 3 | 1 | 0 | 2 |
| Compact car | 15 | 98 | 43 | 20 | 35 |
| Mini van | 14 | 109 | 49 | 30 | 30 |
| Sedan | 21 | 122 | 53 | 35 | 34 |
| Wagon | 9 | 54 | 20 | 15 | 19 |
| SUV | 13 | 76 | 29 | 20 | 27 |
| Minicar | 21 | 133 | 67 | 41 | 25 |
| Truck | 4 | 18 | 11 | 0 | 7 |
| Van | 1 | 4 | 1 | 0 | 3 |
| Total | 101 | 617 | 274 | 161 | 182 |
5.2 Experimental results
Table 2 shows the results of the experiment conducted under the experimental conditions described in the previous paragraph. Based on the experimental results, we can find that this sensor can detect parked vehicles with high accuracy regardless of parking pattern and vehicle type. The detection rate was 100%, which was equivalent to or higher than that of other conventional types of sensors.
| Parking pattern | No. of vehicles tested (Vehicle) | No. of vehicles detected (Vehicle) | Detection rate (%) |
|---|---|---|---|
| Forward parking | 274 | 274 | 100 |
| Backward parking | 161 | 161 | 100 |
| Pass-through parking | 182 | 182 | 100 |
| Total | 617 | 617 | 100 |
6. Summary
6.1 Discussion
This algorithm, devised based on the data obtained from the results of the experiment conducted on various types of vehicles, is designed to detect vehicle-specific magnetic field variation given to geomagnetism. Using the wireless geomagnetic vehicle sensor equipped with this algorithm enables the identification of the engine section of a vehicle without fail to detect a vehicle with high accuracy. Using this sensor also enables the provision of appropriate information on the congestion situation and guide a vehicle to a vacant parking space. In addition, in this development, we succeeded in achieving a lifetime of ten years by mounting this sensor as a completely wireless stationary sensor and focusing on an energy-saving design. Furthermore, we designed a housing capable of withstanding a load of 5t because it was possible that the sensor would be run over by various kinds of vehicles in a parking lot. This enabled installation of this sensor in a stationary manner in a parking space and operation of it with no maintenance.
6.2 Future efforts and development
In a society where autonomous vehicles and non-autonomous vehicles coexist, a situation we will inevitably face during the transition period toward a completely autonomous driving society, it is necessary to detect non-autonomous cars on the infrastructure side in order to ensure security and safety. For example, if the autonomous running function of an autonomous vehicle detects a vehicle parked near the entrance of a parking lot, it is possible that the vehicle will determine this situation to be dangerous and stops to prevent operation. Utilizing this sensor in such a case enables an autonomous vehicle to be notified of the existence of a parked or running vehicle based on the traveling direction and parking duration.
In addition, by taking advantage of the superior installation property of this sensor, we will consider developing it further into various operations such as the measurement of traffic flow in which the number of vehicles is counted by placing this sensor not only in parking lots, but also on main roads, as well as for the estimation of traveling direction based on the detection time differences by placing two wireless geomagnetic vehicle sensors. It can also be used for the determination of vehicle type sensor using the results of the geomagnetism detection element as a trigger by adding a new senor module, such as an acceleration sensor. By doing this, we will provide running vehicles with useful information from the infrastructure side, aiming at the realization of a safe traffic society toward the arrival of autonomous driving.
References
- 1)
- R.Tyburski, “A review of road sensor techno1ogy for monitoring vehic1e traffic”, ITE jouma1, voL.59, no.8, p.27 (1989).
- 2)
- Katsumi Ohashi, ”Vehicle Recognition from Parking Images using a Stereo Camera”, 4th World Congress on ITS in Berlin(1997).
- 3)
- Katsumi Ohashi, “Development of Silhouette Vision Technique for Vehicle Recognition in Parking Lots”, OMRON TECHlNlCS Vol.38, No.4.
The names of products in the text may be trademarks of each company.