














構造一体化方式による小型光学トルクセンサ提案
人と協調するロボットアームの回転関節は、接触した人や物に損傷を与えない動作を実現するため、関節に加わる力をトルクセンサで計測し力制御を適用する。回転関節の力計測には市販の歪みゲージ式トルクセンサを直列に締結する積み上げ方式が最もシンプルな実現方法であるが、トルクセンサ本体及び締結部の体積・質量増加を招く。これを避けるため歪みゲージ式トルクセンサを回転関節と一体化して小型化する場合、センサ単体のみで1台あたり数十万円/軸のコスト増を招く。
本稿では、計測原理がシンプルであり数万円前後で構成できる光学式トルクセンサに着目し、回転関節と一体化した小型トルクセンサを提案する。これは出力軸側の磁気式マグネットエンコーダのマグネット保持板を遮蔽板として利用し、フォトインタラプタ・調整機構を同心円状に配置する構造一体化方式とする。提案手法により、光学式トルクセンサの積み上げ方式に対して軸方向寸法を52%削減し、関節ユニットで0.05 kg軽量化した。さらに6軸アームの机上計算では可搬質量が0.15 kg増加し、同姿勢における協働ロボットの可搬2 kgに対して約7.5%の可搬増に相当することを示した。
1. まえがき
人と協調するロボットアームでは、人や物との安全な接触動作を実現するため、ロボットの関節や手先に加わる力を計測し利用する力制御が用いられる。これに必要な回転関節の力計測には、高精度な測定が可能である歪みゲージ式トルクセンサを各関節に組み込む方法(以下、従来手法)が一般的である。市販のトルクセンサを回転関節に用いる場合、関節出力軸に直列に締結すると、トルクセンサ部の体積・質量が増加する。この増加をさけるため、トルクセンサと回転関節を一体化させる方針が考えられる。しかし歪みゲージと回転機構の一体化には、専用起歪体の設計・製造技術が必要となり、各関節に搭載することと相まってコストアップ要因となる。
本稿では、回転関節と一体化させた場合に、歪みゲージ式よりも廉価に実装可能な光学式トルクセンサに着目した。光学式トルクセンサは歪みゲージ式と比較し、構成部品を積み上げる必要性があるため、小型化に課題があった。
これに対して、回転関節の構造部材の一部を光学式トルクセンサの遮蔽板として一体化する方式(以下、構造一体化方式)を提案する。積み上げ方式との比較により体積・質量の削減効果を示すとともに、机上計算におけるトルクセンサ内蔵関節ユニットによる6軸アーム可搬質量変化を評価する。
2. 従来構成と課題
2.1 従来構成
従来手法の歪みゲージ式トルクセンサは高精度である一方、高コストかつ破損しやすいという課題1)が指摘されている。これに対して、低コストにトルクセンサを構成する方法として、光学式トルクセンサ2,3)が提案されている。光学式トルクセンサは、ひずみゲージ式トルクセンサに比べ精度で劣るものの、トルクセンサを内蔵した回転関節単位で数%〜10%程度の直進性誤差2,6)を許容できる場合には選択肢となりうる.
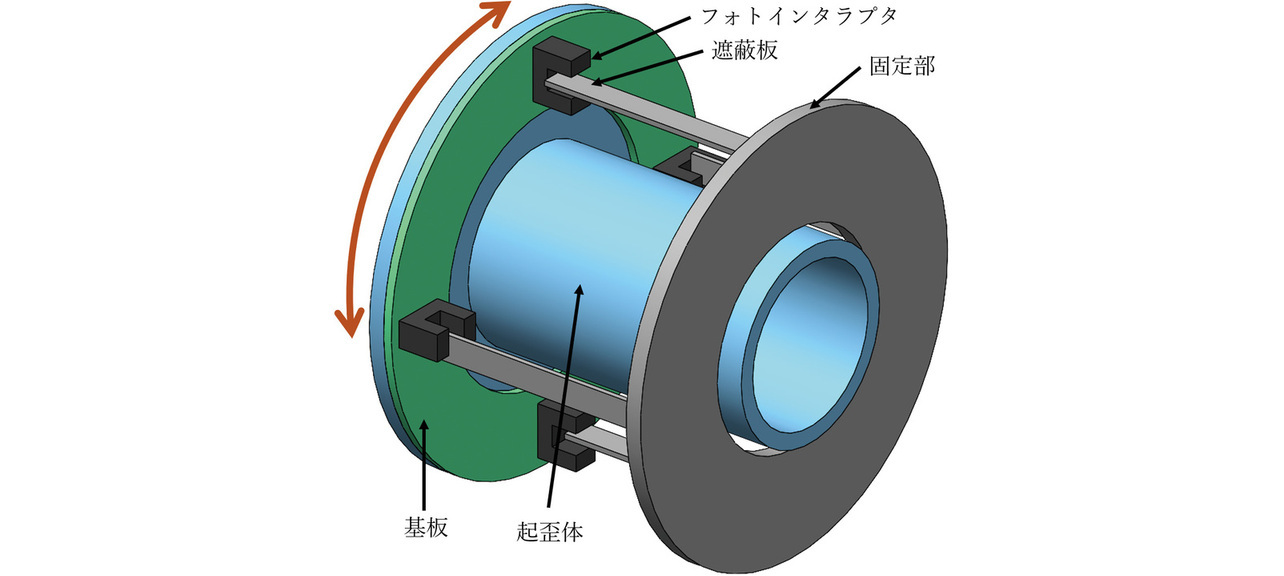
先行研究2,3)では、光学式トルクセンサの安価な構成要素と計測原理が述べられている。光学式は出力軸負荷を反映する起歪体の変形を、起歪体に接続された遮蔽板の移動量として検知する。遮蔽板の移動量は、特定の範囲内に物体があることを検知し、微小な変形量をアナログ値で検知可能なアナログ式フォトインタラプタによって計測を行う4)。
光学式トルクセンサの概要構造を図1に示す。
2.2 従来手法の課題
従来手法におけるロボットアームへのトルクセンサ追加は、アーム全体の体積及び質量増加となる。これは可搬質量の低減や、可搬質量を維持するためのリーチ短縮など、性能低下が発生する。従ってトルクセンサは、性能要求範囲内で小型軽量であることが望ましい。
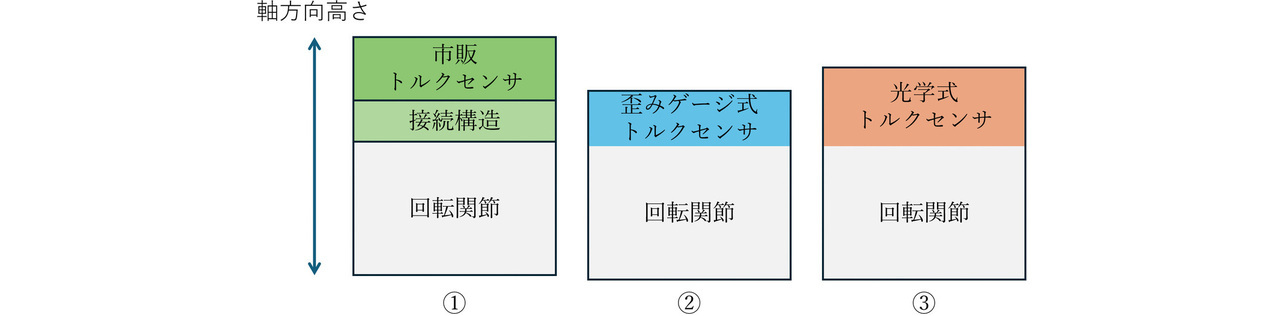
トルクセンサと回転関節の接続方式として、①市販品の歪みゲージ式トルクセンサを直列接続する構成、②回転関節構造を歪みゲージとして一体化する構成、③回転関節の構造材を光学式トルクセンサ構造材として一体化する構成が考えられる。
これらの方式にはそれぞれ以下の課題がある。
- ① 市販トルクセンサ本体と接続構造分の体積・質量が増加し、軸方向高さが増加する。
- ② 異なる関節仕様毎に、歪みゲージ部の専用設計が必要となり、コスト高を招く。
- ③ 専用設計コスト、センサ製造コストはいずれも②より下がるが軸方向に部品を積み上げていく必要があり、②と比較し小型化に難がある。
実際のロボットアームの開発時には可搬質量や可動範囲などの要求を含めた最適設計が可能な②or③が求められる。
①②③の結合方式ごとの軸方向高さについての概要を図2に示す。
2.3 光学式トルクセンサの課題
コスト削減を狙い歪みゲージ式から光学式トルクセンサを採用する際の課題として、センサ自体の大きさと検出精度のトレードオフがある。原理的に光学式トルクセンサの精度向上には、起歪体の弾性変形に対する遮蔽板の移動量を十分確保することが求められる。これは「起歪体を薄くする」「歪みの検出点(フォトインタラプタ)を径方向に対して外側に配置する」「起歪体を軸方向に長くする」ことで達成されるが、後者2つは大型化に直結する。
一方でロボットに内蔵する場合、他の構成部品と比べてトルクセンサだけを大きくすると、可搬質量や可動領域が低下する。よって実際の設計時には、下記の要求を同時に満たす必要が出てくる。
- A) 起歪体薄さ:要求される最大トルク発生時にも最低限永久歪みが発生しない肉厚以上であること。起歪体変形量は精度に寄与するため、寿命と併せて考慮しても、必要以上の厚みは避ける。
- B) 径方向:起歪体の歪み検出点は、出力側に配置するベアリングなどの構成部品直径内に収めることで、センサ性能以外に寄与しない構造部を減らす。
-
C)
軸方向:精度要求範囲内で起歪体の軸長を短くする。
ただし、先行研究では歪み検出部に、遮蔽板・フォトインタラプタ・位置調整機構を軸方向に並べて配置することが求められる。よって部品・機構の合計高さより、起歪体を短くすることが出来ない。
Aは定格寿命と精度のトレードオフにより調整可能であり、Bは構成部品の質量と精度のトレードオフにより調整可能である。一方、Cについては軽量化と精度の調整を図ろうとしても、起歪体高さを部品高さより短くできないという課題が残る。
3. 構造一体化方式による小型化の提案
3.1 構造一体化方式の構造
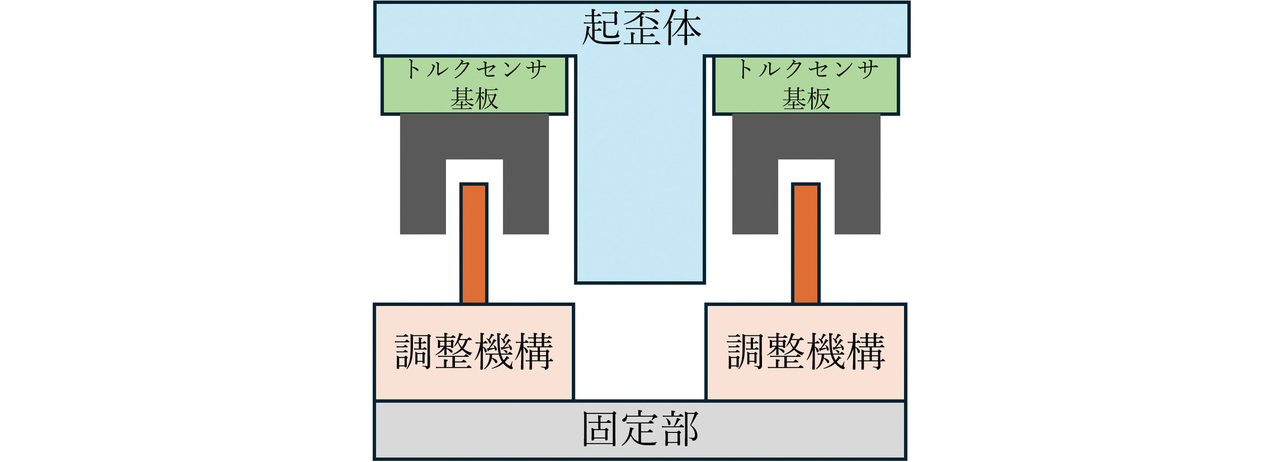
前章2.3 C)において、部品及び調整機構を積み上げた構造を図3に示す。なお調整機構はフォトインタラプタの線形特性が良い検出範囲内に遮蔽板位置を調整する為の機構である。先行研究では、遮蔽板位置をねじで調整する機構である。
従来の積み上げ構造に対して、回転関節内部構造を遮蔽板として一体化し、遮蔽板・フォトインタラプタ・調整機構を同心円状に配置する構造一体化方式を提案する。
提案手法では構成部品を同心円方向に配置すること、トルクセンサ基板のうち、フォトインタラプタ保持部分を別基板として分割し調整機構をトルクセンサ基板内に持たせることで、軸方向高さを短く設計出来る構造となっている。これにより要求精度と小型化のトレードオフをより狙う事が可能となる。
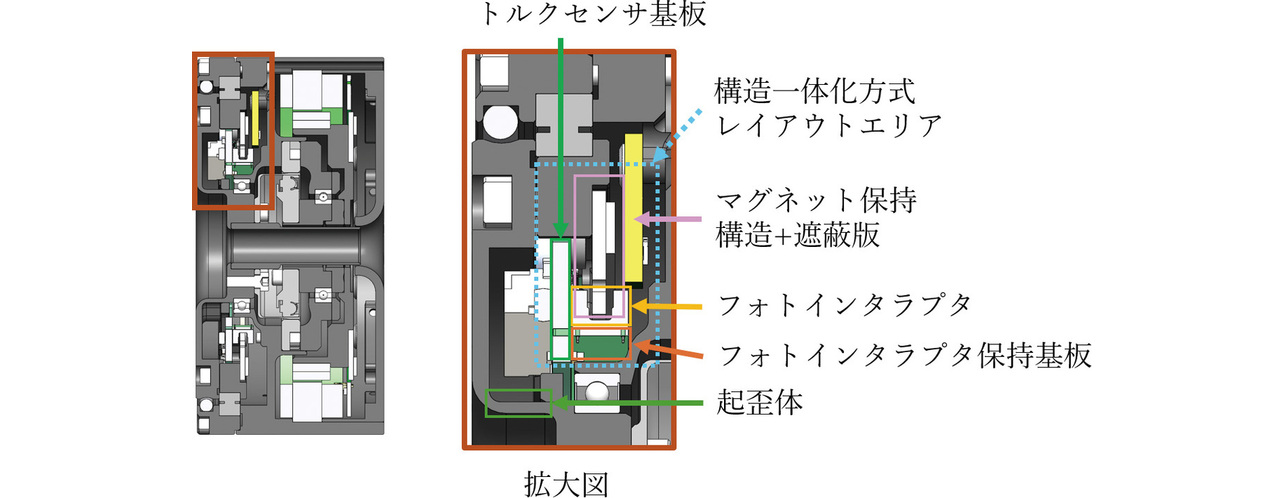
提案手法構造を図4に示す。
本稿では提案手法を用いた光学式トルクセンサ内蔵関節ユニットの構造成立性確認を行った。本稿関節ユニットにおいては出力軸側角度取得のために市販の磁気式ABSエンコーダ基板を含めた構成となっている。
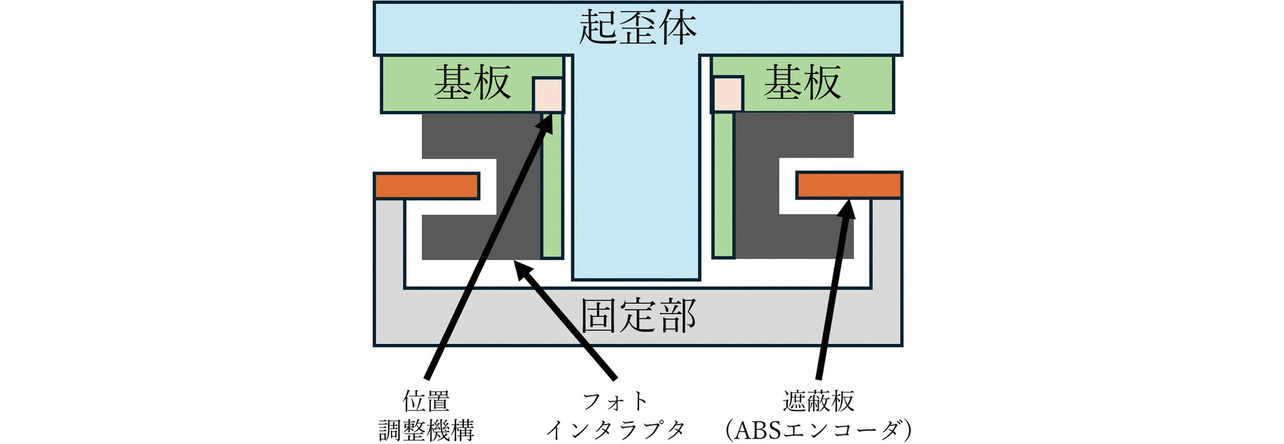
構造一体化方式の構成部品および起歪体との位置関係を図5に示す。
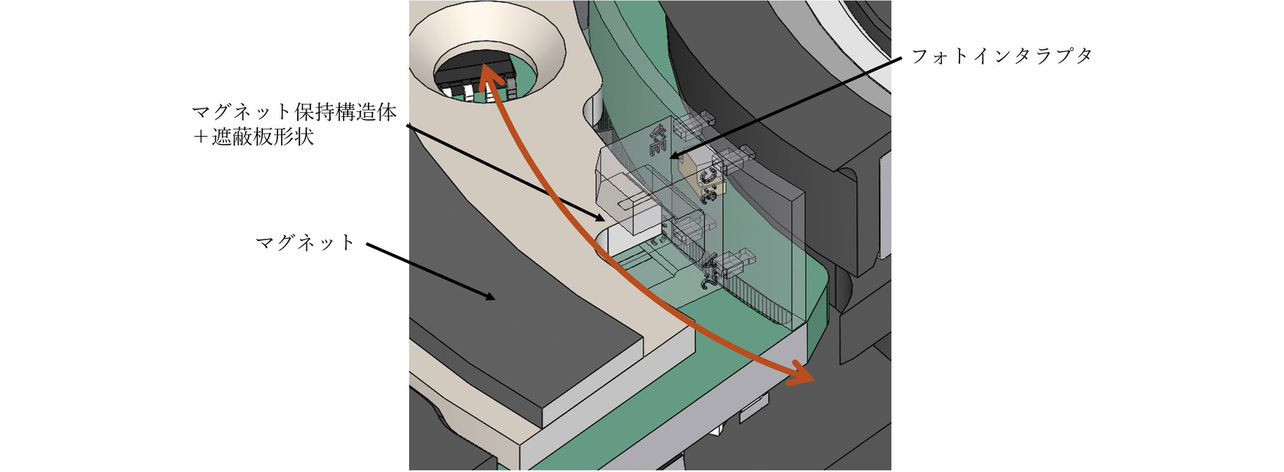
磁気式ABSエンコーダに使用されているマグネット保持板は金属製であり、フォトインタラプタの光路上を通過するため遮蔽板に転用できる。設計上は、マグネット保持板の一部を切り欠いて、遮蔽板としての機能を持たせている。マグネット保持板及びフォトインタラプタの関係を図6に示す。
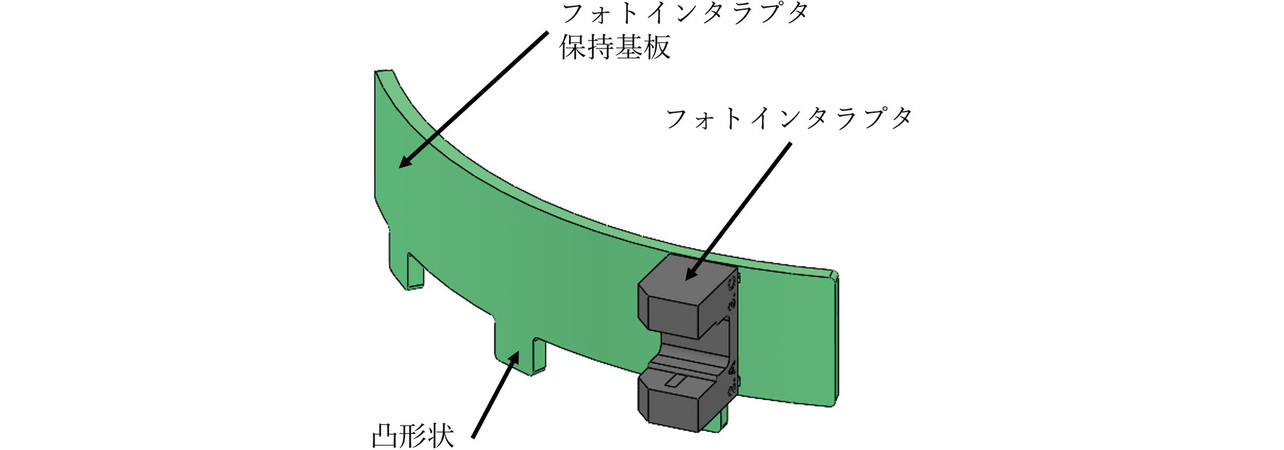
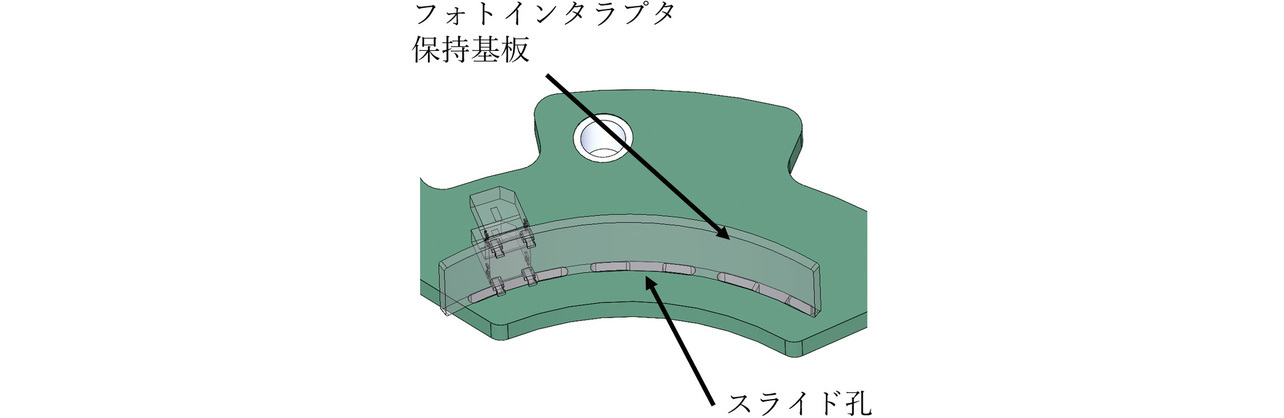
提案手法では固定部にフォトインタラプタの調整機構を置かない為、その設置場所が問題となる。これはフォトインタラプタ保持基板側に電気的接続が可能な凸形状を作り、トルクセンサ基板側にスライド孔を持たせ、そこに挿入後に位置決め・ハンダ付けを行うことで解決する。具体的には、弾性変形可能な0.6 mm厚基板に実装したフォトインタラプタ保持基板を、トルクセンサ基板上の円周方向のスライド孔に沿って調整・接着固定する構造とした。これにより調整機構が独立して存在することによる高さを削減することが可能となる。
フォトインタラプタ保持基板構造を図7に、トルクセンサ基板上のスライド孔を図8に示す。
提案手法は起歪体自体の軸方向長さに制約を課さない一方、径方向の配置を制約する。検出点であるフォトインタラプタは、最外周部に配置することが理想だが、本提案ではトルクセンサの基板サイズφ60 mmに対して、既存部品の制約からφ42 mmの位置にフォトインタラプタを配置することとなった。この配置は遮蔽板移動量が約30%低下する。これは単純計算で直進性誤差が約1.4倍増えることとなる為、今後の最適化が課題である。
フォトインタラプタ保持基板を曲げる事によるフォトインタラプタの位置決め精度については、従来手法を用いて構成した関節ユニットと同じ精度で調整出来ることが確認できており精度は同等であると考えられる。一方で、薄肉基板を曲げることについては、内部銅箔部のパターン断線、定常的に発生する応力によるはんだクラックなどのリスクが将来的に懸念される。特にはんだクラックについては、接着方式を含めた固定方式の検証が必要となる可能性が残る。
また同心円方向により小型のトルクセンサを開発する場合は、フォトインタラプタ保持基板の曲げ半径が小さくなるため、設計にはより詳細な検証が必要となると考える。
4. 効果検証
4.1 小型化の有効性
参考として本稿で開発した光学式トルクセンサと回転関節を一体化させた、関節ユニット全体を図9に示す。

関節ユニットの仕様は表1に示す通りである。
| 項目 | パラメータ |
|---|---|
| 外形 | φ90×L45 mm |
| 中空径 | 8 mm |
| 質量 | 0.57 kg |
| 定格トルク | 5.4 N・m |
| 許容最大トルク | 19 N・m |
| 瞬間許容最大トルク | 31 N・m |
従来の積み上げ方式、構造一体化方式それぞれを採用したときの軸方向の高さの試算結果を表2に示す。なお、トルクセンサに採用しているフォトインタラプタはRPI-2215)である。
| 設計方式 | 構造物 | 合計 | ||
|---|---|---|---|---|
| フォトインタラプタ | 遮蔽板 | ABS エンコーダ |
||
| 積み上げ方式 | 3.3 mm (縦置き) |
4 mm (調整機構込) |
3 mm | 10.3 mm |
| 構造一体化方式 | 4.9 mm (横置き) |
フォトインタラプタ高さに含まれる | 4.9 mm | |
上記より提案手法ではトルクセンサの軸方向長が5.4 mm(52%)削減された。なお基板配置近傍の関節ユニット外周部形状は外径φ90 mm、内径φ76 mm、材質A7075であり、5.4 mm削減は0.05 kg(8.8%)の軽量化に相当する。
関節ユニットとしての軽量化は、ロボットの可搬質量に影響する。ロボットアームとして一般的な6軸アームを構成した場合の影響を考察する。左から根本2軸、肘2軸、手先2軸の関節ユニットを持つロボットアーム概形を図10に示す。
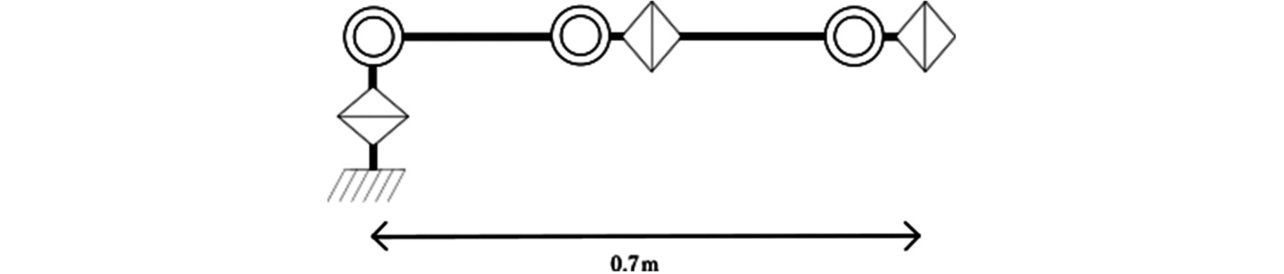
6軸ロボットアームとして、静止状態における根本第1軸に発生するモーメント荷重の減少量から可搬質量を評価する。
肘2軸および手先2軸の軽量化による根元第1軸の可搬トルク増分は合計1.029 N・mである。根元第1軸から0.7 mの位置に荷重が作用すると仮定すると、可搬質量の増分は0.15 kgに相当する。
一例として同程度の出力・姿勢時の協働ロボット可搬が2 kg程度である7)ことから、可搬質量を7.5%増加させることを示している。
実際のロボットアームにおいては、各関節ユニット構造の小型化はフレーム構造部品の軽量化にも寄与することから、実際には上記以上の効果が得られる可能性がある。
5. むすび
本稿では、光学式トルクセンサ内蔵関節ユニットの小型化を目的として、出力軸側の既存構造を遮蔽板として一体化し、センサ構成を同心円上に配置する方式を提案した。
提案手法により軸方向寸法を5.4 mm削減し、軽量化を通じて可搬質量の向上に寄与することを示した。
今後は検出点配置の最適化に加え、曲げ基板の耐久性評価を進める。
また、低コスト性と内製による設計自由度の高さを活かし、各関節で異なる要求仕様に柔軟に対応できる点を活用し、人協調ロボットへの適用と性能検証を進める。
参考文献
- 1)
- 西尾政紀, 杉原知道, “光学センサの動特性補償による安価な関節トルク計測,” 日本機械学会ロボティクス・メカトロニクス講演会2014, 2014, 1P2-J04.
- 2)
- 西尾政紀, 石川省吾, 杉原知道, “減速機内部摩擦補償のための光学センサを用いた安価なトルクセンサ,” 日本機械学会ロボティクス・メカトロニクス講演会2015, 2015, 2A1-B08.
- 3)
- 国立大学法人大阪大学, “トルクセンサ,” 特開2019-190885, Oct. 31, 2019.
- 4)
- D. Tsetserukou et al., “Optical torque sensors for implementation of local impedance control of the arm of humanoid robot,” in Proc. IEEE Int. Conf. Robot. Autom., 2006, pp. 1674–1679, doi: 10.1109/ROBOT.2006.1641947.
- 5)
- ROHM Co., Ltd. RPI-221 フォトインタラプタ小型タイプ, Accessed: Feb. 2, 2026.[Online]. Available: https://fscdn.rohm.com/jp/products/databook/datasheet/opto/optical_sensor/photointerrupter/rpi-221-j.pdf
- 6)
- 橋本稔, ゴドルール・イヴァン, “ハーモニックドライブ内蔵型トルクセンサの高精度化,” 日本ロボット学会, vol. 15, no. 5, pp. 802-806, 1997.
- 7)
- OMRON Corporation. TM5-700, Accessed: Feb. 2, 2026.[Online]. Available: https://store.omron.com.au/knowledge-base/tm-cobot-payload-derating
本文に掲載の商品の名称は、各社が商標としている場合があります。