














長距離性能と広い検出角度安定性を両立したTOFセンサの開発
- TOFレーザセンサ
- dTOF
- 短パルスレーザ駆動回路
- APD個体ばらつき補正
- APD温度補正
現代の製造業では、少子化による労働力不足によって、さらなる自動化が必要とされている。加えて、ニーズの多様化や技術革新に対応するため、柔軟性の高い自動生産の実現が求められている。そのためには、生産設備の動線および稼働範囲を妨げず、長距離から安定して対象物を検出できるセンサが必要となる。そこで、我々は Time of Flight(TOF)技術を用いた光電センサを対象に、最大6 mの検出距離および±85°の角度範囲において、白・黒、粗面・光沢面など様々な色や表面状態を持つ対象物を安定検出することを目指した。特に検出が困難な黒色塗装が施された自動車ボデーに対しては、距離3.5 m、±50°の条件下で安定した検出を設計目標とした。その実現に向け、レーザの短パルス駆動とアバランシェフォトダイオード(APD)の超高感度安定駆動により Signal-to-Noise Ratio(S/N比)を改善し、検出性能を飛躍的に向上させた。その結果、他社製センサでは距離3.5 mで±6°に制限される条件下においても、本技術では±66°まで安定検出が可能となった。これにより、対象物の色や表面状態に依存せず、高い検出安定性を有するTOFレーザセンサ「E3AS-HF」の開発に成功した。
1. まえがき
現代の製造業では、市場ニーズの多様化や急速な技術革新に対応するため、柔軟性の高い自動生産が求められる。さらに、世界的な人手不足の深刻化や、新型コロナウィルス感染症の流行を契機として顕在化した企業の社会的供給責任を果たす観点からも、一層の自動化が求められている。
このような自動生産を実現するためには、ロボットや複雑な自動化設備の活用が必要となる。加えて、生産設備の動線や稼働範囲に干渉することなく、様々な位置に設置しても、長距離から生産対象物の有無を安定かつ正確に把握できるセンサが不可欠である。ロボットや設備の動作を妨げずに対象物の有無を検出するには、一般に指向性の低い超音波や電磁波に比べて、指向性の高い光を使ったセンサの方が適している。
従来から使用されてきた光電センサには、透過形、回帰反射形、拡散反射形といった光量検出タイプや三角測距方式による距離設定タイプが存在するが、それぞれに設置上の制約や検出性能に関する課題がある。たとえば、透過形および回帰反射形は長距離検出が可能である一方、検出対象物の両側にセンサやミラーを設置する必要があり、製造設備のレイアウトを制約する。拡散反射形は、検出対象物の色や表面状態、取り付け角度といった設置条件の影響を受けやすく、検出安定性に課題がある。三角測距方式は、色の影響を受けにくいという利点を有するが、実用上の検出距離は概ね0.5 m程度が限界である。これは、検出距離の長距離化のためには投光部と受光部の間隔を長くする必要があり、それに伴って筐体が大型化するためである。結果として、実用上許容される筐体サイズにより、検出距離の上限が制約される。
一方、近年の半導体技術の進歩により、従来の光電センサの限界を克服する技術が現実のものとなってきた。具体的には、半導体プロセスの微細化による信号処理の高速化や、投受光素子の性能向上によって、TOF方式の距離設定タイプが実用に耐えるレベルに達している。TOF方式は、時間を計測して距離に換算する原理に基づいており、他の方式に比べ対象物の色や表面状態、さらにはセンサの設置状態による影響を受けにくい。また、筐体の大型化も抑えることができ、長距離検出を実現できる。しかしながら、検出感度の制約により、長距離かつ安定した検出が可能な光電センサの実現には至っておらず、TOF方式における検出感度の飛躍的な向上が強く求められていた。
このような背景のもと、前述の目的を達成するために、検出感度の向上を図り、ロボットの動作を妨げることなく、様々な色や表面状態をもつ対象物を最大6 mの長距離から±85°の広い角度範囲で検出可能なTOFレーザセンサを開発した。特に、検出が困難とされる黒色塗装が施された自動車ボデーに対し、生産ラインでの設置場所を考慮して実用上十分とされる検出距離3.5 mからの検出を想定し、目標検出角度範囲±50°を達成するように設計した。
2. TOFレーザセンサ
2.1 TOFの原理
TOFの原理には大きく間接TOF(iTOF)と直接TOF(dTOF)の2種類に分類される。
iTOFはレーザ光をある周波数で強度変調し、その位相情報を用いて対象物までの距離を計測する方式である。図1に示すように一定の周波数で強度変調された正弦波などの連続波を投光し、対象物からの反射光との位相差を求める。
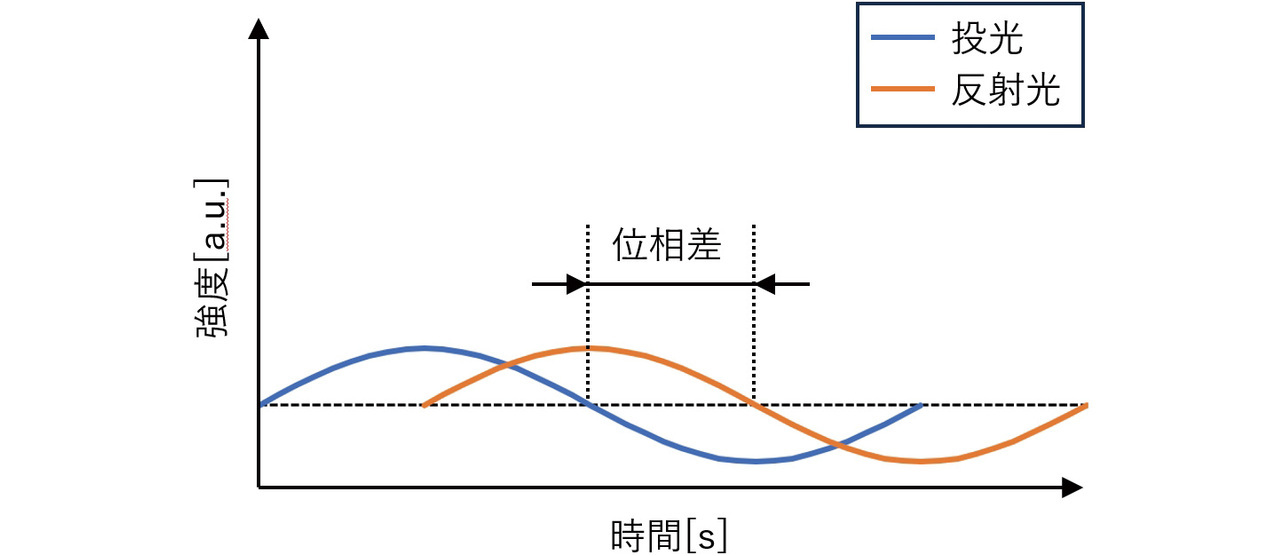
位相差から以下の式(1)により距離dを導出する。
ここでcは光速(m/s)、θは位相差(rad)、fは変調波の周波数(Hz)である。この方式の特徴は一般的に数MHz~数十MHzの比較的低い変調周波数が用いられるため、高速なシステムを必要とせず小型・省電力化が可能なことである。周波数を上げれば位相分解能も上がり、センサとしての検出精度も上がる。しかし、最大6 mの検出距離範囲に必要な周波数は式(1)より25 MHz以下、つまり一回の距離計測に少なくとも40 ns以上の投光時間が必要となる。人体へ影響を考慮したレーザクラス基準において単位時間あたりの光出力に制約があるため、光出力を上げることができず長距離化と検出感度向上を両立できない欠点がある。
一方、dTOFは投光した反射光の往復時間を直接計測する方式である。図2に示すように、パルス状の投光が対象物に反射して戻ってくるまでの往復遅延時間を計測する。
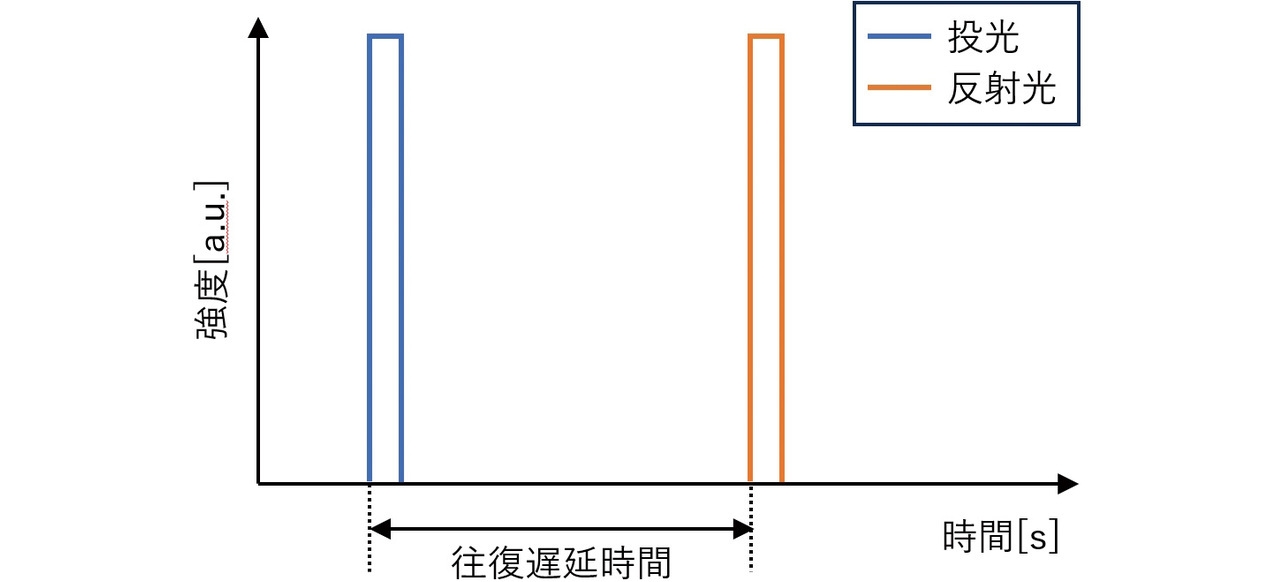
往復遅延時間から以下の式(2)により距離dを導出する。
ここでcは光速(m/s)、Δtはパルス投光してから光が戻ってくるまでの往復の遅延時間である。受光回路が反応する周波数であれば数nsオーダ以下の超短パルス投光でも計測可能な原理であるため、iTOFよりも投光パワーを上げて検出感度を高めやすい。以上より、長距離検出と高感度化を実現し、黒色塗装が施された自動車ボデーを安定検出する手法としてはdTOFが適している。
2.2 dTOFの課題
dTOFにより黒色塗装が施された自動車ボデーを50°以上の角度から安定して検出するには、システム全体の感度向上が不可欠である。感度設計の目標値は、自動車ボデーの角度反射率特性とセンサ構成要素の個体ばらつきを考慮したS/N比試算結果に基づき設定した。投光系ではピーク光出力を500 mW以上とし、受光系では対象物からの微弱な反射光を高感度に捉えるため、従来の非増幅型受光素子と比較して約50倍の検出感度を目標とした。これは、競合製品比で投光系が約2倍、受光系が約50倍に相当し、両者を組み合わせて約100倍の感度向上を想定したものである。
投光系には、長距離検出のため指向性と直進性に優れた半導体レーザダイオード(LD)を使用しており、安全性にも配慮が必要である。例えば、日本産業規格 JIS C 6802では、レーザ製品の危険度に応じて8段階のクラス分類がなされており、その中でもクラス1は最も安全な区分として定義されている。実際の製造現場においては、レーザセンサを搭載した装置の周囲で作業者が組立や調整作業を行うことが多く、特別な安全対策を講じることなく使用可能なクラス1適合のセンサに対する要求が高い。このような現場のニーズおよび安全要件を踏まえ、クラス1の安全基準を満たしつつ、センサ性能の指標であるS/N比を最大化するLD駆動回路を実現する必要があった。レーザクラスに関する制限の中でも、特に設計上の制約となりやすいのが平均光出力に対する規定であり、使用する光源波長660 nmでは390 μW未満である。平均光出力を低減するための一つの手段として、LDの投光パルス周期を延長する方法が考えられる。しかしながら、この方法では単位時間あたりの受光信号の取り込み回数が減少するため、平均化処理によるノイズ低減効果が十分に得られなくなる。したがって、投光パルス周期については延長しないことを前提条件とし、投光パルス幅を受光回路で検出可能な2.0~3.0 nsまで短縮することで平均光出力の制限を満たす方針とした。なお、単一パルスのエネルギーについての規定は200 nJ未満となっている。また、LDには素子ごとに発光効率の個体差が存在するため、制限内で最大の光出力を得るためには、個体差を補正可能な光出力可変機能を併せ持つことが求められる。従来のLD駆動回路では、LDパッケージに内蔵されたフォトダイオード(PD)のモニタ電流によるフィードバック制御で光出力を制御していたが、nsオーダの短パルスには追従できないため、短パルス駆動での光出力可変機能の実現がLD駆動回路の課題となる。
受光回路では、受光素子の選定が最もS/N比に影響を与える。表1に代表的な受光素子として、PINフォトダイオード(PIN PD)、APD、シングルフォトンアバランシェダイオード(SPAD)の特性を示す1,2)。相対感度は、PIN PDの受光感度を基準値として1とした場合の値を示している。
| 比較項目 | PIN PD | APD | SPAD |
|---|---|---|---|
| 相対感度※ | 1 | 10~100 | 10000以上 |
| 降伏電圧の 個体ばらつき |
― | ±十数% | ±十数% |
| 感度の 温度特性 |
無し | 数%/℃ | 数%/℃ |
| 照度耐性 | 数万lx | 10万lx以上 | 無し |
PIN PDは温度変化に対して非常に安定であるが、他の受光素子と比較して相対感度が2桁以上低い。一方、SPADは最も高い相対感度を有するが、理論上1光子で応答して飽和するため、照度耐性に欠けるという欠点がある。
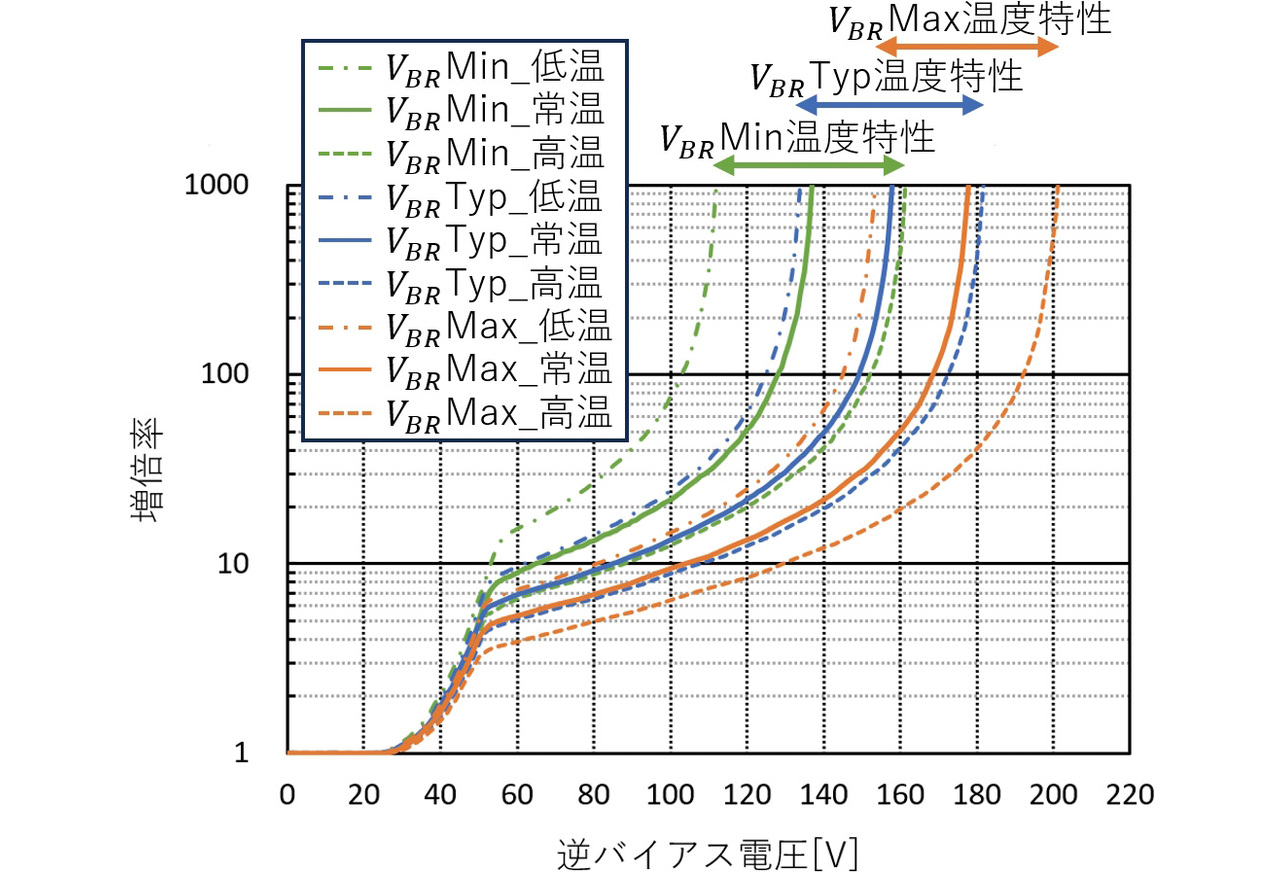
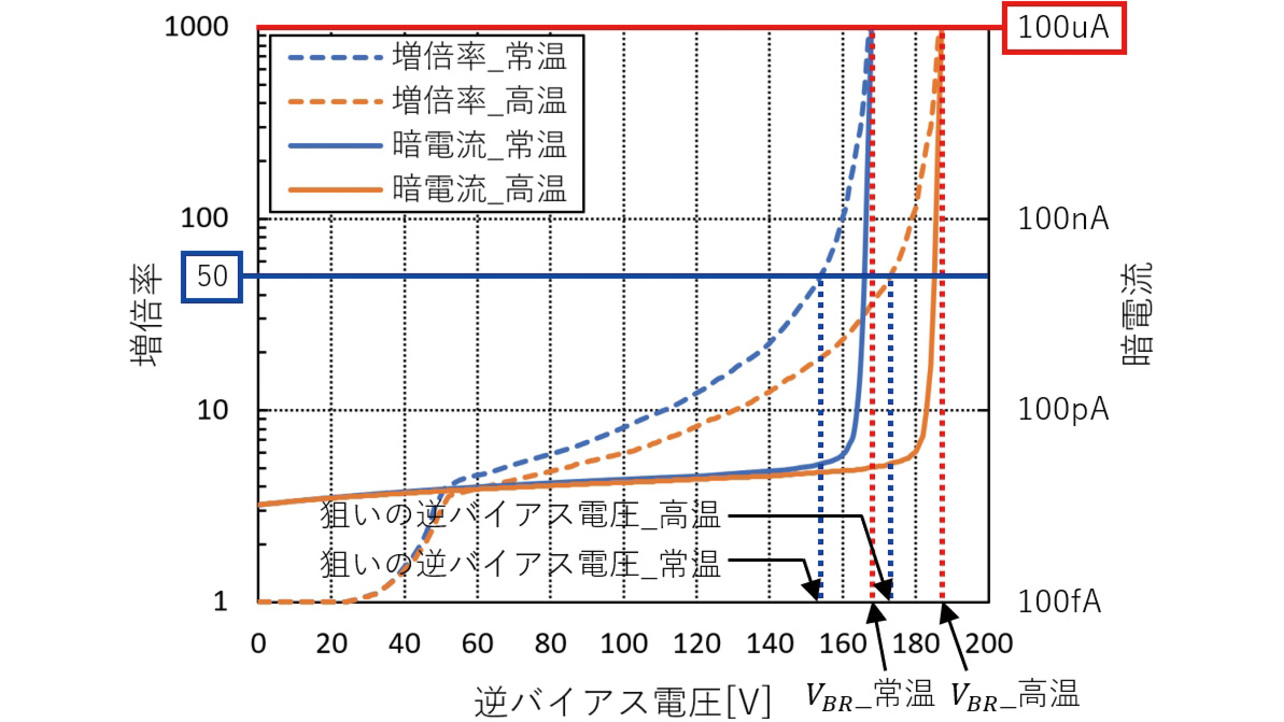
感度や照度耐性に関する原理的制約を回避しS/N比を向上させるには、APDを用いて高い増倍率を設定する。このことで、PIN PDに対して相対感度50倍が実現可能となる。しかし、APDは個体ごとのばらつきや温度依存性が大きいという課題を抱えている。具体的には、図3の例に示すように、APDに逆方向電圧を印加した際、ある電圧値を超えると絶縁が破壊され大電流が流れる限界電圧である降伏電圧(VBR)に顕著なばらつきが見られる。色ごとの実線、破線、一点鎖線はそれぞれVBRの個体ばらつきを示しており、最大と最小の差は約40 Vに達する。また、温度変化によってもVBRは大きく変動し、同色の曲線がVBRの温度特性を示している。高温と低温とで約50 Vの差が生じる。このように、APDは個体ばらつきと温度変動による特性のばらつきが大きく、一定の逆バイアス電圧で駆動した場合、得られる増倍率にばらつきが生じ、感度の安定性が損なわれる。したがって、高い増倍率を維持しつつ、これらの変動要因を抑制する逆バイアス電圧制御の確立は、受光回路のS/N比向上における重要な課題である。
3. 課題を解決する技術
2章で指摘した課題解決に向け、S/N比向上にはLDの短パルス駆動を、APDの超高感度安定駆動については逆バイアス電圧制御回路の新設計を行った。
3.1 LDの短パルス駆動
レーザクラス1の制限を満たしつつ、最大のS/N比を得るために、短パルス駆動と光出力可変機能の実現が求められる。これらの要求を満たすLD駆動回路について検討を行った。
一般的に、LDの駆動にはAutomatic Power Control(APC)方式が用いられている。この方式では、LDパッケージに内蔵されたフォトダイオード(PD)から得られるモニタ電流を用いて光出力を検出し、その出力が一定となるように順方向電流をフィードバック制御する。この方式は、LDの温度変化に伴う発光効率の変動に対しても安定した光出力が得られるという利点がある。しかし、応答速度に制限があり、ナノ秒オーダのパルス発光が求められるdTOFには適さない。そこで、キャパシタやインダクタにパルス1発分に相当するエネルギーを蓄えておき、蓄えたエネルギーに基づいてLDをパルス駆動する方式が提案されている3)。今回開発したTOFセンサでは、本方式をベースとして光出力の可変機能の追加を行った。LD駆動回路の構成を図4に示す。
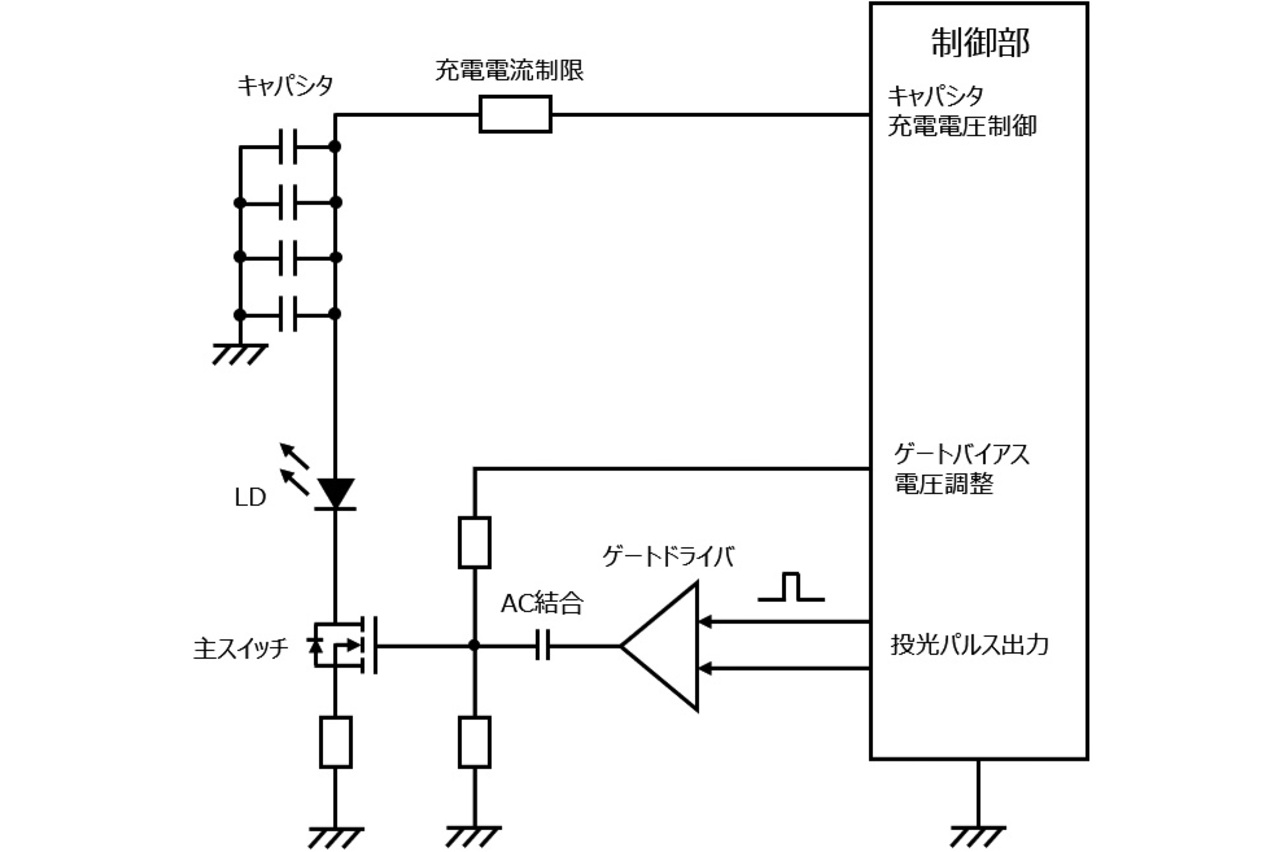
光出力の可変機能は、制御部でキャパシタの充電電圧を制御することで行う。この制御方式では、LDや駆動回路のばらつきを組立時に調整し、安全かつ最大パワーを出力できる。加えて、ユーザの操作によって光出力を可変するユーザ調整機能も実現する。ユーザ調整機能を使用することで、例えば検出対象物がミラーなどの高反射物体の場合には、光出力を下げることで、APDの過飽和を防ぎ、検出精度を向上させることが可能となる。主スイッチには、窒化ガリウム電界効果トランジスタ(GaN FET)を採用した。GaN FETは、従来のSi MOSFETと比べて、高速なスイッチング速度、小型サイズ、高効率化を実現しており、電気自動車(EV)や小型のUSB PD充電器などに応用が進んでいる。これにより、短パルスかつ大電流でのLDパルス駆動を実現した。
3.2 APDの超高感度安定駆動
APDの個体ばらつき補正と温度特性の安定制御のために、工程内で個体毎の増倍率を推定する方法の確立と、センサ内で増倍率を補正するための逆バイアス電圧制御回路の設計を行った。
増倍率を推定する方法には、代表的なものとして光電流法、雑音法、暗電流・降伏電圧法の3つが挙げられる4-6)。光電流法は、所定の光子数をデバイスに照射し、得られた光電流を測定することで増倍率を算出する方法である。この方法は、電流値を直接測定するため精度が高いものの、量産時には光源の強度変動や位置ずれで不安定になる課題がある。雑音法では、APDの雑音電流の強度から理論式を用いて増倍率を求める。この方法は、光による平均電流と雑音因子から増倍率を算出するため、光強度の絶対値を必要とせず、光源の安定性に影響されにくい。一方で、測定回路の雑音や外部雑音を分離する必要があり、測定系が複雑になりやすい。以上を踏まえ、我々は暗電流を測定し降伏電圧を求め、APDの増倍率対逆バイアス電圧曲線から増倍率を推定する暗電流・降伏電圧法を採用した。この方法は、生産工程内でAPDを遮光する簡素な構成でよいため、設備コストを抑えつつ効率的な増倍率の推定と安定した量産が可能となる。
今回採用した増倍率の推定と逆バイアス電圧制御するための受光回路の構成を図5に示す。温度センサ、ヒータ、暗電流測定回路、昇圧回路をセンサ内部の基板に搭載することで増倍率の推定と逆バイアス電圧制御を実現した。
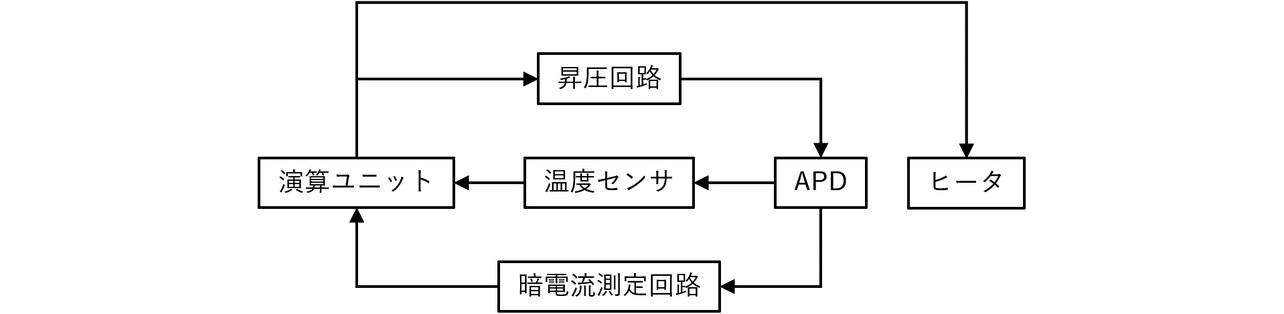
この回路を用いて増倍率の決定および制御に関する手順を以下に示す。
センサの組立工程において、昇圧回路を用いてAPDに印加する逆バイアス電圧を段階的に上昇させ、増倍率を高めていく。すると、図6の例に示すように、ある電圧に達した時点で、増倍率の上昇と共に暗電流が急激に増加する。この暗電流を暗電流測定回路で監視し、値が100 uAに達した時の昇圧回路の出力電圧をVBRとして記録する。同時に、その時点の温度を温度センサで測定し、あわせて記録する。この一連の測定は、センサ内部のヒータを用いて段階的に温度を変化させながら、異なる温度条件下で複数回実施する。ヒータは主に低温時のLDの加温を目的として搭載しているが、組立工程でも用いることによって短時間で温度差を作り出し、APDの個体値を素早く取得できるよう工夫している。
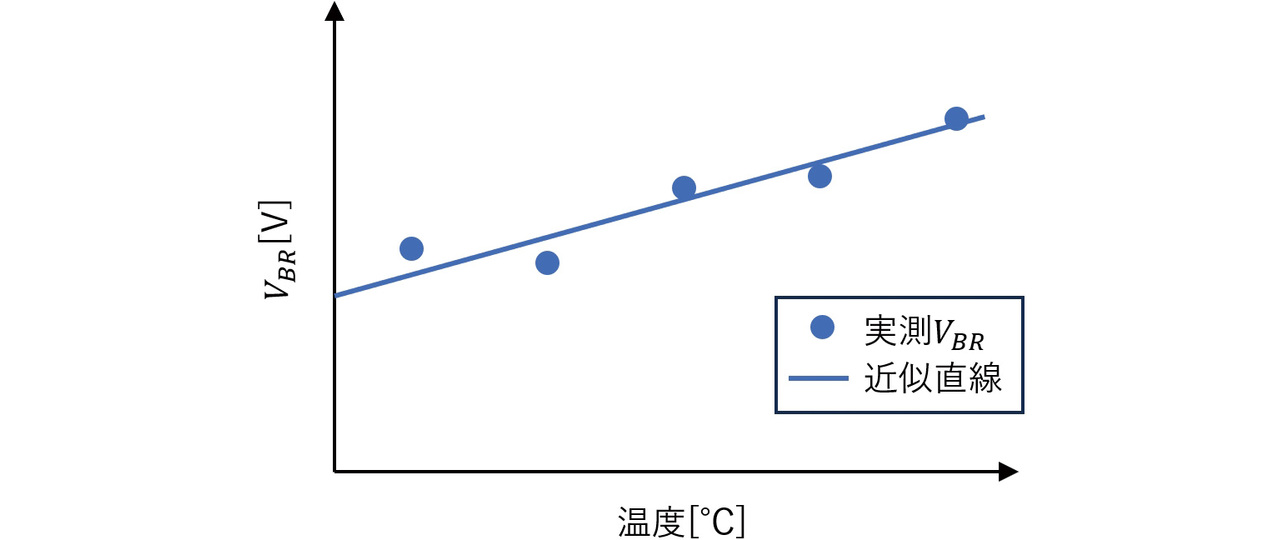
次に、上記の方法で取得した各温度におけるVBRの値をもとに、APDの代表的な増倍率対逆バイアス電圧曲線を参照し、目標とする増倍率を得るための逆バイアス電圧を算出する。算出された結果は、図7の例に示すように、VBRは温度の上昇に伴ってほぼ比例して増加する。この特性を一次式で近似し、その傾きを温度係数γと定義することで、温度変化に応じた逆バイアス電圧の制御により、安定した増倍率の制御ができ、安定した高感度が実現できる。
4. 評価実験
4.1 短パルスLD駆動回路の性能評価
設計したLD駆動回路について、LDの光パルス形状、光出力の可変動作の評価を実施した。
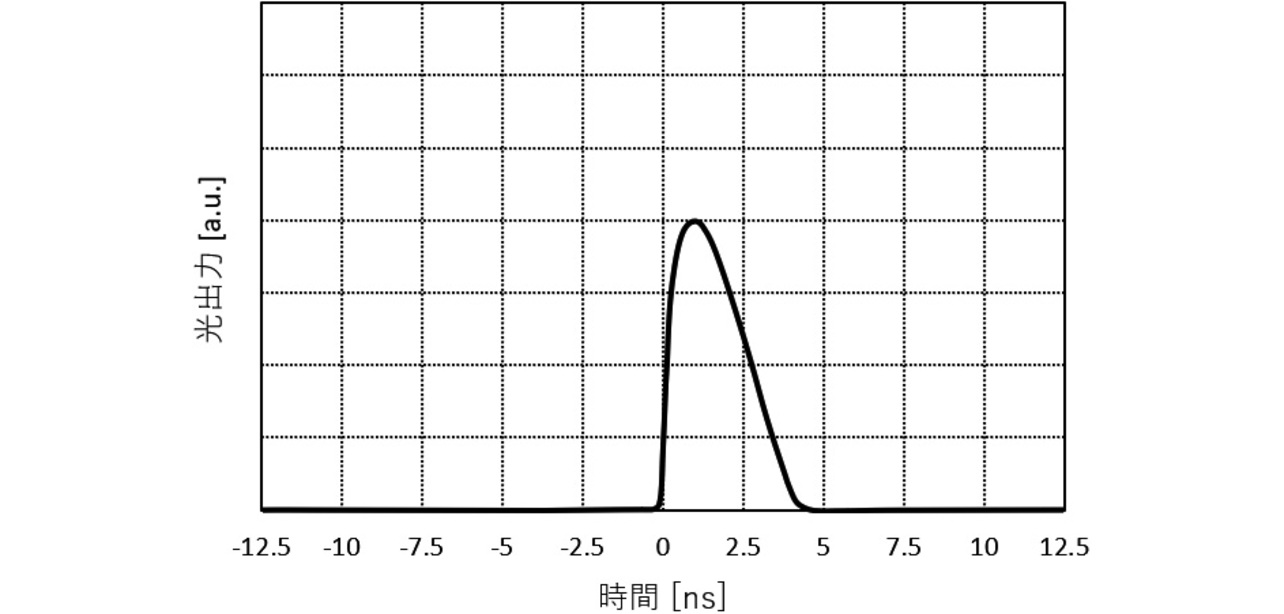
光パルス形状は、OEコンバータ(Graviton社、形式:SPD-1_650 nm、帯域幅:1.2 GHz)と、オシロスコープ(Tektronix社、形式:DPO7354C、帯域幅:3.5 GHz)を使用して測定した。図8に光パルス形状を示す。オーバーシュートの発生は確認できず、良好な形状であった。
光出力の可変動作の測定は、光パワーメータ(Ophir Optronics Solutions社、形式:PD300)を使用して行った。なお、PD300では平均光出力のみが測定されるため、ピーク光出力を算出する場合は、OEコンバータで測定された半値全幅および投光周期より投光デューティ比を求め、平均光出力をデューティ比で除する必要がある。
キャパシタ電圧を可変したときの平均光出力の変化を図9に示す。キャパシタ電圧が3 V以上の領域では、電圧にほぼ比例した光出力が得られることが確認できた。これにより、製品の出荷検査工程でLDの発光効率のばらつきを補正して、レーザクラス1の制限内で最大の光出力が得られるように個体ごとに最適な調整が可能となる。
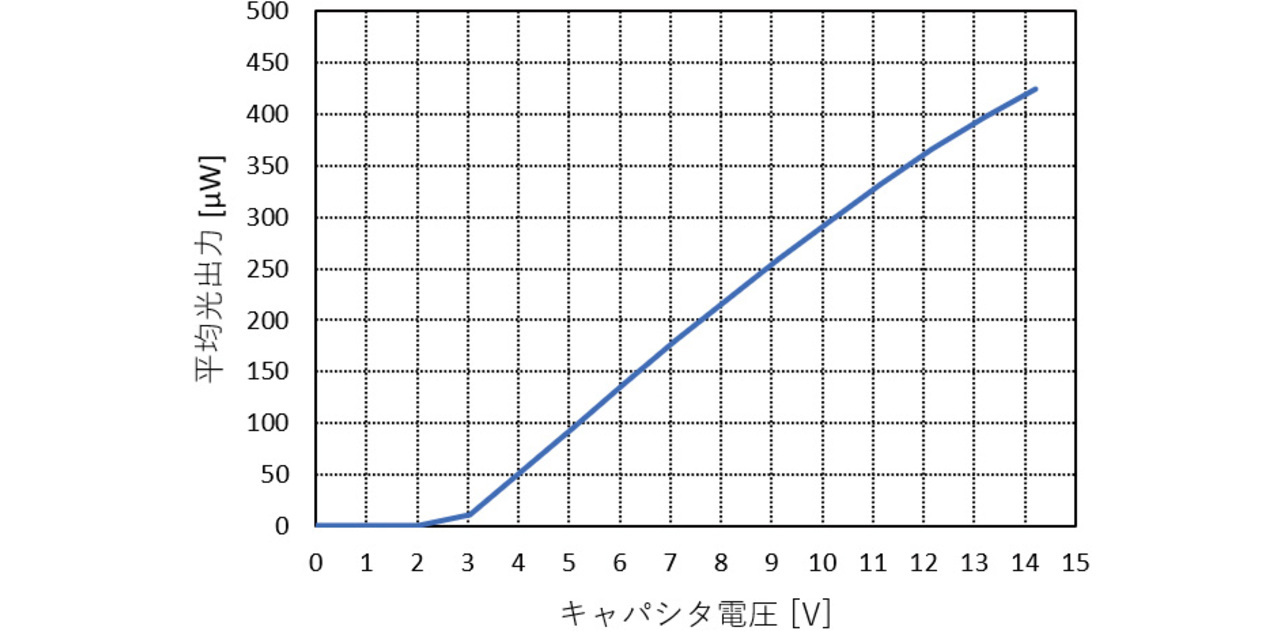
以上の測定結果を整理すると表2の通りとなる。短パルスでのレーザ駆動と、光出力の可変制御が両立できることを確認し、レーザクラス1の制限内で最大のパワーを出力するためのLD駆動回路が実現できた。
| LD発光特性 | 目標 | 実測結果 |
|---|---|---|
| 半値全幅 | 2.0~3.0 ns | 2.7 ns |
| ピーク光出力 | 500 mW 以上 | 535 mW |
| 平均光出力(※1) | 390 μW 未満 | 358 μW |
| 単一パルス エネルギー(※1) |
200 nJ 未満 | 1.4 nJ |
4.2 APD増倍率の温度特性評価
3章2の手順の通り、暗電流・降伏電圧法によって、測定した暗電流からVBRを算出し、設計値である増倍率50となる逆バイアス電圧を推定する。加えて、ヒータを用いて段階的に温度を変化させながら取得したVBRと、温度の一次式の傾きである温度係数γを用いて逆バイアス電圧の温度補正を行った。環境温度-20℃~70℃における目標増倍率50での温度特性を5℃毎に評価した。図10に補正あり、補正なしそれぞれの場合における増倍率変化を示す。
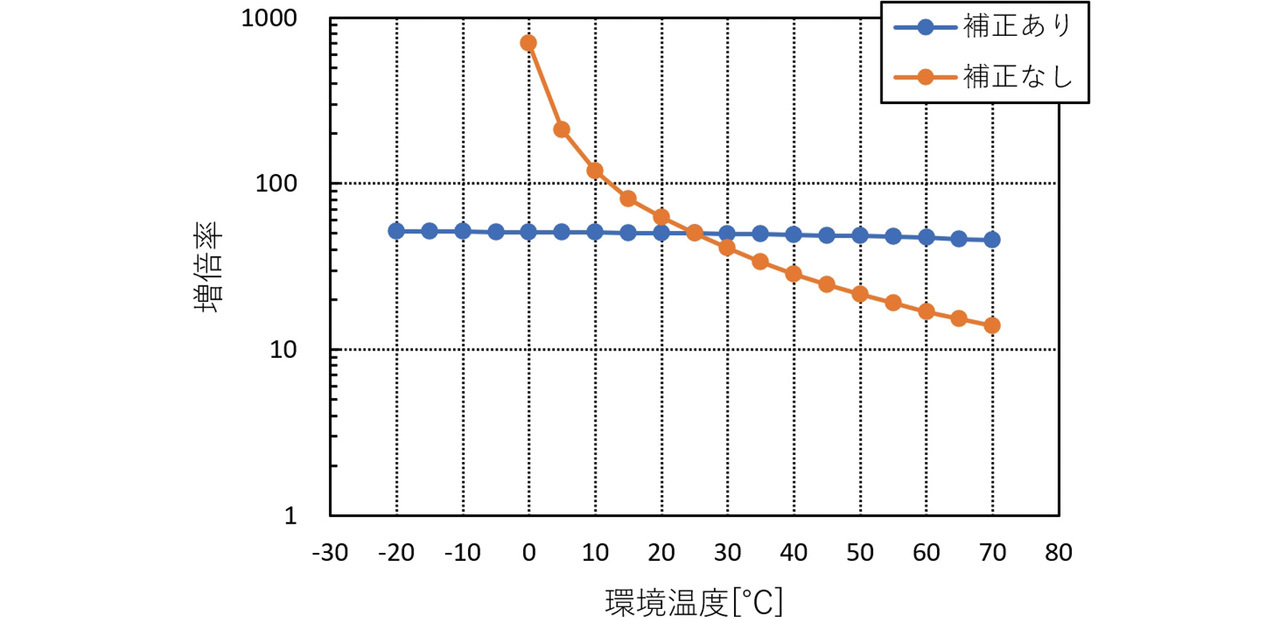
補正なしの場合、増倍率は14~700の範囲で大きく変動したが、補正ありでの増倍率は目標値50を中心として45.6~51.8に収まり、変動率は-9.0%~3.2%に抑制された。これにより、従来1倍の感度に対し約50倍の高い受光感度を維持しつつ、安定駆動が可能であることを確認した。
4.3 検出角度範囲の評価
短パルスLD駆動回路およびAPDの個体ばらつきを補正する受光回路を搭載し、目標感度比100倍で開発したTOFレーザセンサを用いて検出角度範囲を評価した。拡散反射特性を有する白紙および黒紙に対しては、検出距離6 m、センサ応答速度200 msの条件で測定を行った。表3に示すとおり、白紙・黒紙いずれにおいても、測定系として制御可能な最大角度である±85°において検出が可能であることが確認された。
| 比較項目 | 検出角度範囲 |
|---|---|
| 白紙 | ±85° |
| 黒紙 | ±85° |
次に、安定検出が困難とされる黒色塗装が施された自動車ボデー(図11)および黒色のABS樹脂(図12)に対しては、検出距離3.5 m、センサ応答速度200 msで測定を行い、その結果を表4に示す。参考として、A社製センサの評価結果も併記した。A社製センサでは、黒色ボデーに対し相対角度が±6°を超えるとセンサ出力信号がONからOFFへ変化し検出不可となった。一方、開発した自社センサでは、目標値である±50°を上回り、A社製と比較して10倍以上となる±66°まで傾けてもセンサ出力信号はON状態を維持し、安定して検出可能であることが確認された。

| 比較項目 | 自社センサ | A社製センサ |
|---|---|---|
| 黒色ボデー | ±66° | ±6° |
| 黒色ABS樹脂 | ±75° | ±16° |
以上より、短パルスLD駆動回路、APD個体ばらつき受光回路でS/Nを向上させることによって、対象物の色や表面状態に関わらず安定検出が可能であることを確認した。
5. むすび
高度な自動生産の実現に向けて、ロボットや設備の動線および稼働範囲を妨げることなく、長距離から色や表面状態の影響を受けず、広い角度範囲で安定した検出が可能なTOFレーザセンサを開発した。短パルスLD駆動回路、APD個体ばらつき補正受光回路によって高いS/N比を実現することで黒色塗装が施された自動車ボデーでも±66°の角度から検出が可能であることを確認した。
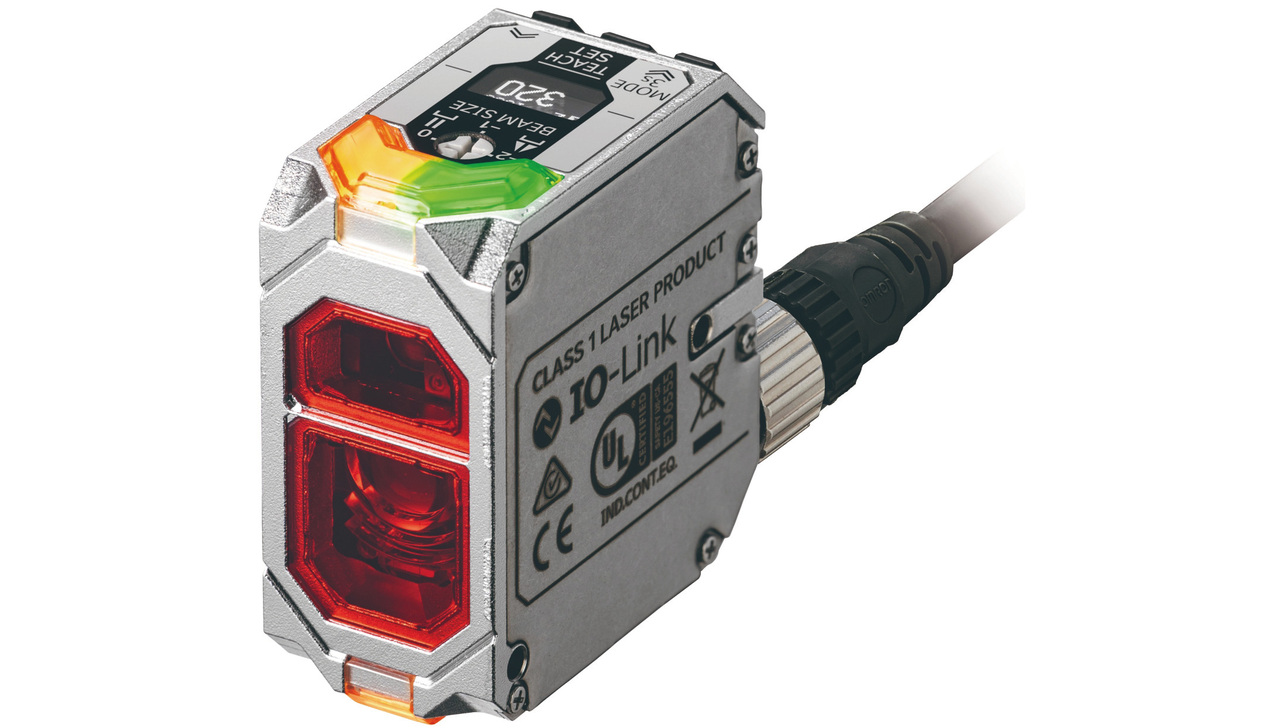
本技術を搭載したTOFレーザセンサE3AS-HFシリーズ(図13)を2025年3月に商品リリースした。
今後もさらなる感度の向上や小型化を実現する技術に取り組み、お客様がより使いやすく生産効率を最大化できるセンサを開発していきたい。
参考文献
- 1)
- 浜松ホトニクス. データシート/Si APD S14644シリーズ.(2021). Accessed: May. 27, 2025.[Online]. Available: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/ssd/s14644_series_kapd1067j.pdf
- 2)
- 浜松ホトニクス. データシート/SPAD(Single Photon Avalanche Diode)S16835シリーズ.(2024). Accessed: May. 27, 2025. [Online]. Available: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/ssd/s16835_series_kapd1087j.pdf
- 3)
- Efficient Power Conversion(EPC). AN032 ナノ秒の大電流共振パルス・ドライバの設計, レーザー・ダイオード, Lidarなどのアプリケーション向け.(2024). Accessed: May. 27, 2025.[Online]. Available: https://epc-co.com/epc/Portals/0/epc/documents/application-notes/AN032%20Design%20of%20High%20Current%20Nanosecond%20Resonant%20Pulse%20Drivers-jp.pdf
- 4)
- K. Tsujino et al., “Experimental Determination of the Gain Distribution of an Avalanche Photodiode at Low Gains,” IEEE Electron Device Lett., vol. 30, no. 1, pp. 24–26, 2009.
- 5)
- 浜松ホトニクス. 技術資料/Si APD.(2025). Accessed: May. 27, 2025.[Online]. Available: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/ssd/si-apd_kapd9007j.pdf
- 6)
- 日本産業規格, JIS C 5954-8:2025, 2025.
本文に掲載の商品の名称は、各社が商標としている場合があります。