Corporate | Japan
Corporate | Japan










We are Shaping the Future!私たちが手繰り寄せる未来ストーリー

ロボットは、私たちの一部として、どこまで機能し得るか?AIエージェントに物理的な身体と人のような五感を与えて、私たちの生活に溶け込ませる研究が進んでいる。
2024年、ある驚くべきロボットシステムが披露された。それは、手の動きに同期して動く、車輪のついた円筒形の小型ロボットの群れだ。魚の群れのように集団で協調しながら行動し、パターンを形成したり、大きな物体を操作したりすることができる。
これは、人の身体的な制約を拡張する可能性を秘めたAI搭載ロボットの一例である。例えば、テニスや音楽演奏においてラケットやバイオリンは、身体の延長として機能する道具であるが、群ロボットは、それ以上の可能性を私たちにもたらすかもしれない。
近未来をデザインし、新たな価値を創造する革新技術を研究することを目的に設立されたオムロン株式会社の子会社であるオムロン サイニックエックス株式会社(OSX)。そこでIntegrated Interactionグループのプリンシパルインベスティゲーターを務める吉田成朗は、群ロボットのような分散したシステムが、人の身体の延長として機能し得るかを探求している。
「身体の一部が、決まった形を持つ物体ではなく、流動的に形を変える "群れ"であったらどうなるか。その可能性を探っています」と吉田は語る。
人が制御するこうした群ロボットは、将来的に多様な分野での応用が期待される。吉田は、群ロボットが捜索救助活動を変革させるかもしれないと期待する。ハードウエアの進化により、人が入り込めない狭い隙間を群ロボットが通り抜け、瓦礫の除去などを支援できるようになるかもしれない。さらに未来には、体内に送り込めるほど小型化できれば、外科医の腫瘍摘出手術を支援するなど、医療分野での活用も現実味を帯びてくる。
「群ロボットが、人の身体や手の形状・機能を模倣することで、瓦礫を掴んだり、腫瘍を摘出したりする作業が、直感的な操作を通じて行えるようになります」と吉田は説明する。
最終的に吉田が目指すのは、私たちの身体を取り囲み、包み込むような群ロボットの実現だ。「群れの形態や機能を活用することで、身体の形状はさらに多様に変化させることができ、環境に対する柔軟性と適応力が飛躍的に高まるでしょう」と語る。
その実現に向けて、まずは人々がこのような群れをどのように知覚するかを神経学的な観点から検証したいと考えている。これまでの研究では、人工の身体部位(たとえば6本目の指など)の存在に脳が適応できるかどうかが調べられてきた。
一方、吉田は、人が群ロボットを自分とは別個の存在として認識するのか、それとも従来の道具のように身体の延長として扱えるのかを明らかにしたいと考えている。「群ロボットのように分散した存在を、人は自分の身体の延長として認識できるのでしょうか」と吉田は問う。「これこそが、私たちが解き明かすべき問いなのです」。
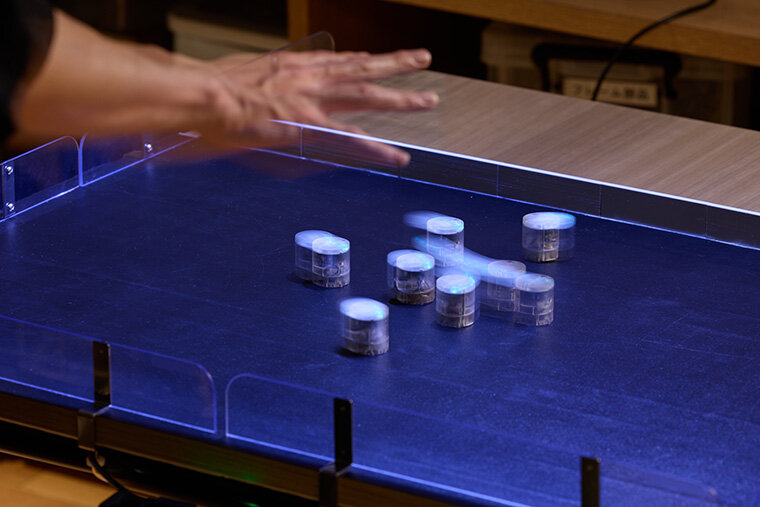 手の動きで群ロボットを操作する吉田
手の動きで群ロボットを操作する吉田
群ロボット研究の目標達成に向けて、OSXは、大学や研究機関、企業から多様な人財を結集して開発している。それは、外界(環境)とのインタラクションにより、ウェルビーイングを高めることができるAIの開発である。
吉田は、群ロボットも含むAIエージェントを使う際、人がウェルビーイングを得るためには「自分の意志で動かしている」という主体感を維持することが不可欠だと考える。OSXが行った実証実験では、ユーザーが群ロボットを自分の身体の延長と感じ、制御しているという感覚を持ったことが確認された1。
群ロボットを構成する個々のロボットは、互いに衝突しないよう自律的に動くようにプログラムされている。そのため、「どこまでロボットに自律性を持たせつつ、人の主体性を保てるか─それを慎重に検証する必要があります」と吉田は語る。目指すのは、ロボットが人の意図を察知し、それに応じて動くことだ。
「AIエージェントが社会に貢献するためには、人の主要なコミュニケーション手段である自然言語を通じて、スムーズに対話できる必要があります」と語るのは、Knowledge Computingグループでプリンシパルインベスティゲーターを務める橋本敦史である。
橋本たちの研究チームは、ViLaIn(Vision-Language Interpreter)という技術を開発した2。これは、視覚と言語の入力を、大規模言語モデル(LLM)を用いて、ロボットが実行可能な構造化された動作計画に変換するものだ。近年の多くの研究では、ブラックボックス型のLLMを用いて、ロボットの動作を直接生成しているが、これらの手法では、ロボットの動作計画の正確性と安全性を毎回検証する必要があり、ロボット工学やプログラミングの専門知識がユーザーに求められると研究チームは指摘する。
それに対してViLaInでは、人とロボットは初期状態と目標状態について合意するだけでよい。その後、ホワイトボックス型アルゴリズムが目標に到達するための信頼性の高い計画を特定する。「これは、人同士がタスクを依頼し合う仕組みに似ています」と橋本は説明する。「私たちは、相手がそのタスクを具体的にどう完了するかまで、常に気にしているわけではありません」。
2024年、オムロンが開発する卓球ロボット「FORPHEUS(フォルフェウス)」の第9世代にViLaInを搭載し、卓球のプレイヤーは「できるだけ長くラリーを続けたい」など、練習の要望をロボットとの対話を通して伝えることができるようになった。ViLaInを活用することで、ロボットは指示に従うだけでなく、プレイヤーの状況を観察し、提案を行うことも可能になる。
しかし、AIが進化しても、「目標を決定するのはAIではなく、常に人であるべきです」と橋本は強調する。そのためには、人の音声による指示が不可欠だと言う。そうすることで、人は常に主導権を握ることができるからだ。
 料理ロボットを操作する橋本
料理ロボットを操作する橋本
群ロボットの研究に加え、OSXの研究者たちは、ロボットが現在苦手としているタスクの性能向上にも取り組んでいる。
ロボットはすでに、工場における溶接や部品塗装などの作業を自動化しているが、小さな部品を正確に穴にはめ込むような組み立て作業は、依然としてロボット工学の難題のひとつだ。この課題に対し、Roboticsグループは、大学との共同研究を通じて、部品の組み立てやペグインホールタスクを実行可能なソフトロボット「Saguri-bot」を開発した3,4。
Saguri-botは、衝撃を吸収する柔らかい手首のような関節を備えており、触覚センサによって表面を「触れながら」位置を調整することができる。OSXのリサーチオーガナイザーであり、Roboticsグループのプリンシパルインベスティゲーターを務める濵屋政志は「この柔軟性が、従来の硬いロボットでは困難だった作業を可能にします」と説明する。濵屋は、製造業の未来においてソフトロボットが重要な役割を果たすと考えている。
「世の中では依然として硬いロボットが主流ですが、ソフトロボットであれば、人と同じ作業空間でより安全に協働できます」と語る。
研究チームは、Saguri-botが将来的に複雑な形状にも対応し、タスクを瞬時に学習して、短時間で新しい組み立てラインに適応できるようになることを目指している。
現在は他分野の専門家と連携し、様々なセンサモダリティを統合した学習方法の構築にも取り組んでいる。
「物理的な特性であれ、動作の仕方であれ、"人間らしさ" を備えたロボットこそが、人にとって最も使いやすい存在になるでしょう。それこそが、人とロボットが融和するための鍵なのです」と濵屋は語る。
「OSXでは、身体と五感を備えたAIエージェントの進化を実現することを目指しています」と、濵屋は付け加える。
 Saguri-bot を使って小さな部品をスロットに挿入する濵屋
Saguri-bot を使って小さな部品をスロットに挿入する濵屋
参考文献
1. Ichihashi, S. et al. Proc. 2024 CHI Conf. Hum. Fact. Comp. Syst. 267, 1-19 (2024). Article
2. Shirai, K. et al. 2024 IEEE Int. Conf. Robot. Auto. doi: 10.1109/ICRA57147.2024.10611112
3. von Drigalski, F. et al. IEEE/RSJ Inter. Conf. Intellig. Robots & Sys. 8752-8757 (2020). Article
4. Fuchioka, Y. et al. IEEE/RSJ Inter. Conf. Intellig. Robots & Sys. 9159-9166 (2024). Article
当ページの内容はNature(※)2025年6月26日号の特集企画「Nature Index Science Inc. 」に掲載された記事広告を日本語に翻訳したものです(日本語版文責:オムロン株式会社)。
※Natureは世界中の読者に最先端の科学を伝える国際的な総合科学雑誌です。







