














社会インフラへのモニタリング技術の活用(2)
- 構造物
- 橋梁
- 維持管理
- モニタリング
- 構造解析




高度経済成長期に建設された社会インフラの老朽化が進む中で、その維持管理にいくかの社会的課題がある。点検が必要な構造物の増加に加え、点検結果の評価には高度な技術的判断が必要である。さらに、5年に一度の点検の義務化により点検費用が高額になっていることなどが課題である。これに対し、維持管理の高度化・効率化が可能なIoT技術を活用したモニタリング技術が期待されている。筆者らは、東京工業大学と共同で省電力化を図ったワイアレスセンサによる遠隔モニタリングシステムを開発し、2014年度から国土交通省直轄の橋梁において現場実証を実施してきた。本稿では、このシステムを活用し、筆者らが提案する「特性カルテ」と「劣化シナリオ評価」による健全度診断の成果と維持管理への活用の有効性について報告する。
1. まえがき
米国では1930年代のニューディール政策によって大量の道路橋が建設され、50年が経過した1980年代に橋梁に代表される社会インフラ事故が発生し、維持管理が不十分であったことが指摘された1)。日本においては1960年代の高度成長期以降に大量に橋梁が建設されたことから、米国と同様に50年が経過する2010年以降のインフラに対する安全性が問題視され、国土交通省は、社会インフラの長寿命化の検討、維持管理への対策を進めてきた。その様な状況のもと、2012年12月に発生した中央自動車道笹子トンネルの天井版崩落事故では、老朽化の不安が現実化しただけでなく、管理されているはずのインフラ構造物の点検の課題も顕在化したと言える。
また、近年頻発している地震や台風などの自然災害への備えも社会的課題となっている。これらの社会インフラが抱える課題は多種多様であり、土木分野だけでなく、IoT、AIなど、分野を超えた技術の連携が求められている。
一方、一品生産の土木構造物は個別性が高く、工業製品のような課題の体系化、共通化が容易ではない。そこで筆者らは、このような課題解決に向け、2013年度から東京工業大学に「社会インフラのセンシング・ソリューション研究講座」を開設し、オムロングループが保有するセンシング技術、IoT技術と、大学の土木工学を融合し、維持管理の高度化・効率化を目的にインフラモニタリングの技術開発と活用の検討を進めてきた。
2014年度には、内閣府が主導する戦略的イノベーション創造プログラム(SIP)の「維持管理・更新・マネジメント技術」に係る公募で採択を受け、5ヶ年にわたるモニタリングシステムの現場実証を行ってきた。本稿では、第1章で本研究の背景となる社会インフラの老朽化の状況、および筆者らのこれまでの取り組みの経緯について概説した。
第2章では、社会インフラの維持管理における現状の課題から、予防保全のためにデータによる管理基準の設定が重要であることを示す。
第3章では、橋梁を対象に、劣化損傷を表す指標である「特性カルテ」と、指標の変化を評価する「劣化シナリオ評価」によるモニタリング手法を新たに提案し、構造物の階層に応じた診断の手順を示す。
第4章では、開発したモニタリングシステムをSIPの現場実証に適用した結果を示す。対象橋梁は鋼材の腐食や、コンクリート床版のひび割れが確認され、剛性低下が懸念される。これに対し、モニタリングによりひび割れが桁の剛性低下に寄与していることを、構造上の特徴量との関係により示す。さらに、初期状態、終局状態を推定し、健全度(現有性能)を定量的に示すことで、管理基準の設定が可能となり、提案する手法が予防保全による維持管理に有効であることを示す。
第5章では、本研究で得られた成果をまとめる。
2.維持管理の現状と課題
インフラ構造物は、スクラップアンドビルドから、ストック重視に変化せざるを得ない状況におかれている。これは、インフラ構造物が完成から50年を超え、老朽化が進んでいる一方で、厳しい財政状況から容易に建て替えができないためである。そのため、構造物の機能・性能を使用目的に適合するよう、維持または補修、補強をする保全が重要となる。
保全の方法は事後保全と予防保全があり、事後保全は構造物が損傷、劣化等によって機能・性能が低下するか、喪失した後に行う保全であり、一方、予防保全とは、計画的に構造物の点検、修繕、交換などを行い、使用中の機能・性能低下を未然に防止する保全である。
図1に示すように、予防保全では、継続的に構造物の健全度(現有性能)を把握し、管理基準による評価を行うことで、小規模な修繕を実施することが可能となる。したがって、構造物の寿命を延ばし、安全・安心を確保するとともに、更新費を抑えることでライフサイクルコストの低減を図ることが可能となる2)。
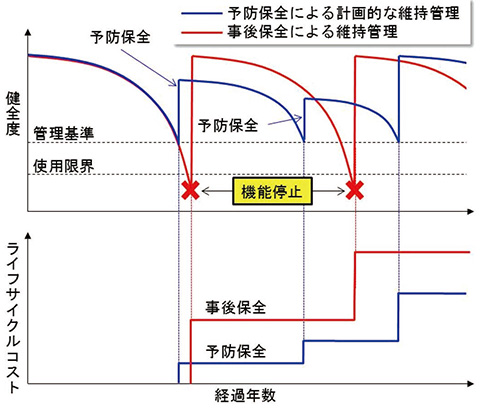
予防保全を実行していくためには、健全度を把握し、管理基準を設定することが重要となる。しかし、現状の維持管理における点検は、5年に1度の人手による外観検査が中心であり、表面的な劣化現象への評価が主体であるため、性能評価と結びついていないという指摘がある3)。そこで客観的なデータにより、現状の健全度の評価や使用限界を予測するための手法について、老朽化の課題が顕在化している橋梁について検討を行った。
3.解決策の提案
3.1 特性カルテと劣化シナリオ評価
構造物の維持管理では、外力に対する応答を計測することが一般的である。代表的な計測として、振動(加速度)、傾斜、変位やひずみなどが挙げられる。例えば、橋梁は活荷重(自動車重量)や地震などの外力により振動する。特に、橋梁の質量や剛性によって固有に決まる固有振動を計測することは、橋梁の特性を把握する上で基本的な手法である。また、外力により橋梁は変形し、変形により応力を生じる。橋梁の設計の基本は応力であるが、応力は直接計測できないため、応力と関係のあるひずみを計測する。
すでに、これらは光ファイバや無線などを活用し、モニタリングする手法が、種々提案されている4)。しかし、「劣化メカニズム等の技術的な知見レベルに整合しておらず、劣化損傷等を説明できない」、などの指摘がある5)。これは、計測データ(振動やひずみ量など)を、直接、評価指標としている場合が多く、指標の変化が示す構造上の意味が理解しづらいことや、構造物の応答のみの評価であるため、変化の要因が評価できないことが課題として考えられる。
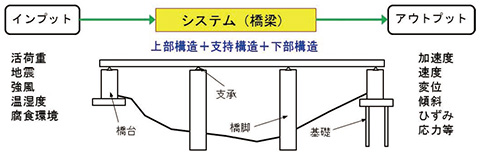
一方、制御分野では、実際のシステムや現象の解析、予測などを行うために、計測データからシステム同定を行うが、構造物のモニタリングでも同様であり、図2に示すように、荷重や地震など、どのような力が加わり(インプット)、それにより橋梁がどう応答したか(アウトプット)、という対応関係を評価することが重要である。この対応関係は橋梁の構造特性を表すため、「特性カルテ」と呼び、新たな評価指標の考え方として提案する。
また、劣化損傷の対象により、カルテのインプットとアウトプットの組み合わせを選択する必要があるが、センサの種類を増やすことは、センサに対応した設置や保守の手間や、コスト、信頼性を考慮すると好ましくない。そこで、設置するセンサは、汎用性の高い加速度センサとひずみセンサを基本とし、上位側でデータを必要な情報に変換する。例えば、加速度データから固有周波数や変位へ、ひずみデータから中立軸や活荷重などへ情報を変換し、劣化損傷に対応した情報を得ることで、上記の課題に対応できる。
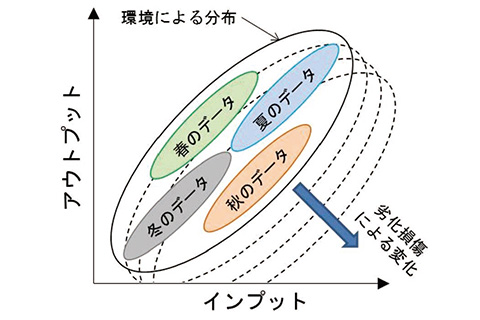
一方、図3に示すように、構造物が健全である場合も、温度や活荷重などの環境により、特性カルテはある範囲で分布し、さらに劣化損傷の進行により、この分布全体が変化すると考える。したがって、分布を把握したうえで、特性カルテの変化を構造上の特徴量として抽出できれば、初期と終局の状態を推定し、健全度を把握することができる。特徴量とは材料や構造の特性を示すパラメータを指し、例えばヤング係数や密度、バネ定数などである。この様に特性カルテと、構造解析を組み合わせた評価手法を新たに提案し、「劣化シナリオ評価」と呼ぶこととする。
3.2 モニタリング手順
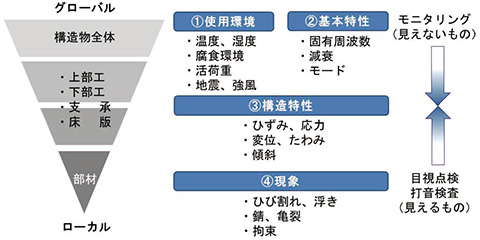
橋梁は規模が大きく複雑なため、劣化損傷の発生位置を正確に予測することは容易ではない。したがって、図4に示すように、構造物全体(グローバル)から、上部構造、下部構造、支承部などの各部へ絞り込んでいくことが効率的である6)。ただし、部材や材料レベル(ローカル)まで予測することは困難であるため、定期点検と組み合わせることが効果的である。
4.現場実証
4.1 計画
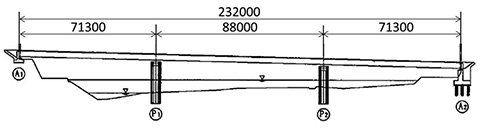
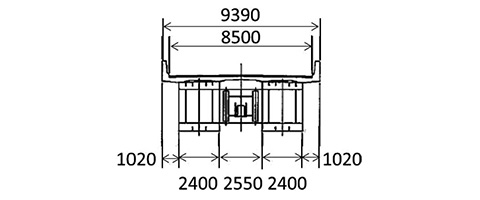
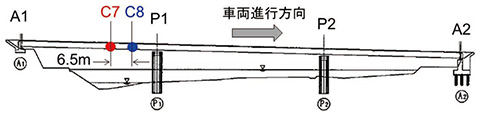
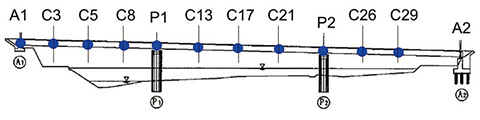
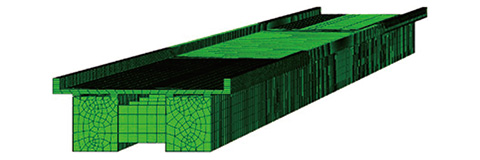
2014年度にSIP採択後、国土交通省より実証現場の提供を受け、モニタリング計画のために現地調査を行った。対象橋梁は2007年3月に竣工した、橋長232m、支間長71.3m+88.0m+71.3mの、鉄筋コンクリート床版を有する3径間連続非合成鋼箱桁橋である。図5に対象橋梁の側面図、図6に断面図を示す。
調査の結果、中央径間のコンクリート床版には、橋軸直角方向に約1m 間隔でひび割れが生じており、鋼部材の表面には、部分的に腐食の進行が確認された。そこで、表1に示すように、腐食やひび割れによる剛性低下の把握を目的に、3.2項で示したモニタリング手順を踏まえた計画を立案した。また、災害時への備えとして、地震時の損傷評価も考慮した計画とした。
| 項目 | 目的 | 評価 | |
|---|---|---|---|
| 平常時 | 腐食 (箱桁全体) |
腐食環境の把握と経過監視 | ①使用環境:腐食環境 |
| 板厚の減少による鋼箱桁の剛性低下把握 | ①使用環境: 活荷重、温度 ②基本特性: 振動特性(固有周波数、減衰、モード) ③構造特性: ・桁のひずみ、たわみ ・橋軸方向の各断面の断面応力 (中立軸、合成効果、断面剛性) |
||
| コンクリートひび割れ (中央径間: 1m 間隔) |
コンクリート剛性低下把握 | ||
| 災害時 | 地震、台嵐 | 異常発生位置や発生時刻、異常レベルの定量化 | 部材間の非線形応答分析 |
4.2 使用環境(活荷重)の評価
(1)目的
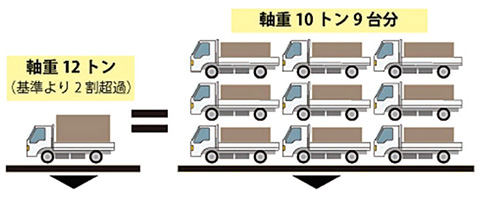
自動車交通等による外力の繰り返しにより、構造物に疲労が累積され、損傷に至ることは一般的に知られている。そのため道路法では、車両の重量に対して総重量20t、軸重(車軸にかかる重さ)10tという制限が設けられている。特に橋梁に対しては、大きな損傷要因となることが研究で示されており、重量の12乗で損傷に影響するとも言われている7)。例えば、図7に示すように、軸重12tの車両1台が橋梁の疲労に及ぼす影響は、軸重10tの車両9台分に相当することになる。そこで、使用環境の評価、および4.4項に示す構造特性評価におけるインプット情報とするために、活荷重計測を行った。
(2)設置
車両通行時の橋梁部材の応答から重量を求めるBridge Weigh-In-Motion(以下、B-WIM)を採用した。B-WIMは1970年代に米国で開発され、桁の影響線を利用する手法が主流である。影響線とは、単位荷重が移動したときに、部材の応答(例えば、桁の断面力、または反力など)が、どのように変化するかを、単位荷重の位置の関数として表したものである。
桁の影響線は、支間長に依存するため応答時間が長くなり、複数車両が存在した場合、車両相互の影響を受ける。そこで、桁ではなく応答時間が比較的短い床版の影響線を利用するB-WIMを構築した9)。
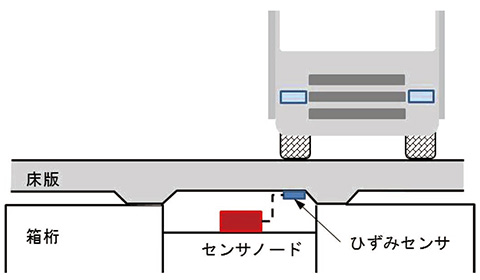
センサは筆者らが開発した、省電力で屋外での長期設置が可能な、ピエゾ式ひずみセンサを利用した10)。
ピエゾ式ひずみセンサは、計測方向に依存性があるため、図8に示すように、タイヤ通過位置付近の床版裏側の車線幅方向に設置することで、桁(車両進行方向)の影響を受けにくい構成とした。また、走行速度を計測するため、車両進行方向の2カ所(図9のC7、C8)にセンサを設置した。
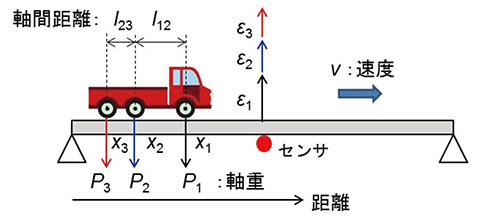
ここで、B-WIM の原理について概説する11)。図10に示すように、橋梁を速度 v で走行する3軸の車両に対して、ひずみセンサの設置位置(x=0とする)におけるひずみと荷重の関係を考える。
影響線は、単位荷重の位置の関数として表されるため、I(x)とすると、理論上のひずみ εd に関して以下の関係が成り立つ。

ここで、1軸目が時刻 t=0 にセンサ上を通過したとすると、時刻 t=tn における理論上のひずみ εd(n)は、式1から次式で表される。

軸間距離 lij と軸重 Pk は既知とし、v は図9に示す車両進行方向の2カ所に設置された、ひずみセンサ間の通過時間と設置距離から求める。
一方、同じく時刻 tn におけるひずみの計測値を εm(n)とした場合、計測時間内の全ての計測点において εd(n)と εm(n)の2乗誤差 φ が最小となるように影響線 I(x)を求める。

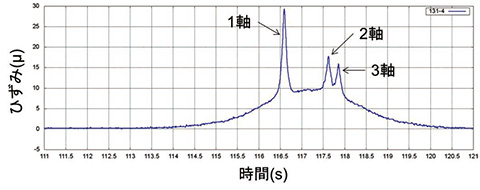
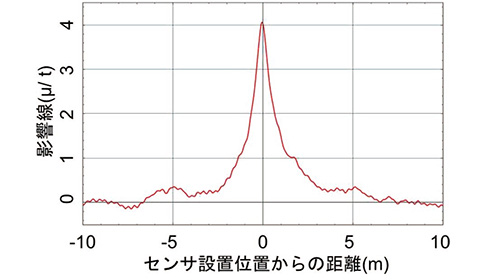
I(x)は、B-WIM運用前に試験車両による走行試験を実施し、予め求めておく。走行試験時の計測波形 εm(n)、および、求めた影響線 I(x)を図11、12に示す。
一方、B-WIMの運用時は、得られた一般車両の計測データから、速度 v と各軸の通過時間差から軸間距離 lij を求める。これらと予め求めた影響線 I(x)により、式3から軸重 Pk を未知数として求めることができる。
(3)B-WIM の精度評価
走行試験によりB-WIMの精度評価を実施した。試験車両の諸元と試験条件を表2、3に示す。目標精度は、欧米の重量計測に関する規格12)13)を参考に、総重量において真値に対する計測誤差を±20%以下とし、試験条件(車両台数、走行位置、荷重、期間、サンプル数)から信頼度を90%(平均±1.65σ、σ:標準偏差)とした。これはデータを統計的に扱うことが可能なレベルである。
| 試験日 | 車両 | 総重量[t] | 1軸重[t] | 2軸重[t] | 3軸重[t] |
|---|---|---|---|---|---|
| 2017年1月 | 1 | 11.82 | 4.98 | 3.58 | 3.26 |
| 2 | 19.86 | 6.12 | 7.04 | 6.70 | |
| 2017年9月 | 3 | 19.78 | 8.08 | 6.06 | 5.64 |
| 4 | 15.22 | 6.44 | 4.52 | 4.26 | |
| 2018年9月 | 5 | 19.78 | 5.72 | 7.16 | 6.90 |
| 6 | 15.32 | 6.00 | 4.80 | 4.52 |
| 試験日 | 車両 | 走行回数 | 走行速度 |
|---|---|---|---|
| 2017年1月 | 1 | 8走 | 20-60[km/h] |
| 2 | 6走 | ||
| 2017年9月 | 3 | 11走 | |
| 4 | 9走 | ||
| 2018年9月 | 5 | 8走 | |
| 6 | 10走 |
図13に示すように、52走の試験において計測誤差は 17.7%であり、目標精度を達成できていることを確認した。
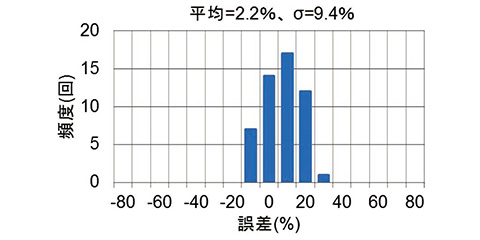
ただし、ピエゾ式ひずみセンサは温度特性(0.47%/℃)を有するため、温度による補正を実施している。また、経年変化(センサ自体、路面凹凸など)によるオフセット変動が、対象橋梁では年間で2% 程度生じることを確認しており、校正を実施している。
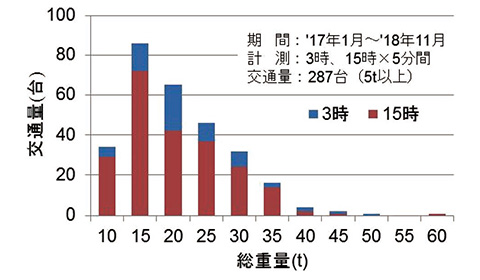
(4)重量別交通量の評価
B-WIMを用いて、2年間の重量別交通量を求めた。計測タイミングは3時と15時の1日2回で、1回につき5分間の計測とし、総重量5t以上の車両のみを集計した。図14に結果を示す。結果から、道路法の規定である、総重量20tを超過する車両の通行実態が把握できた。
4.3 基本特性の評価
(1)目的
対象橋梁ではコンクリート床版のひび割れや、鋼部材の腐食により剛性低下が懸念される。そこで、まず橋梁全体(グローバル)の基本特性を示す固有周波数をカルテとし、カルテの変化について検討を行った。これには、数値モデルを用いた特徴量(構造パラメータ)の影響度分析、および変動分布を求めることが有効である。そこで数値モデルを構築し、固有周波数を評価対象とした劣化損傷の現状(コンクリート床版のひび割れ、鋼材の腐食)に影響するパラメータの推定を実施した14)。
(2)設置
固有周波数を計測する加速度センサは、基本特性を把握するために、低次の振動を計測する必要がある。加速度センサの設置位置を図15に示す。P1、P2、A1、A2を固定端として、支間の1/2(図15のC5、C17、C29)で奇数次モード、1/4(図15のC3、C8、C13、C21、C26)で偶数次モードが計測できる位置を選定した。
(3)評価
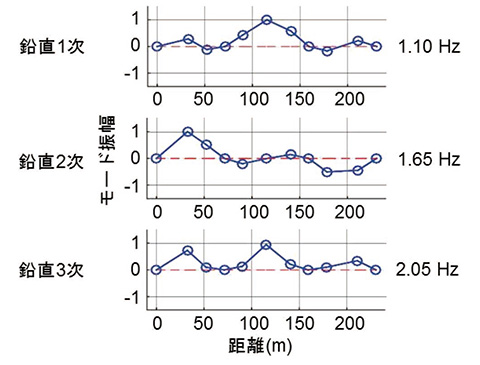
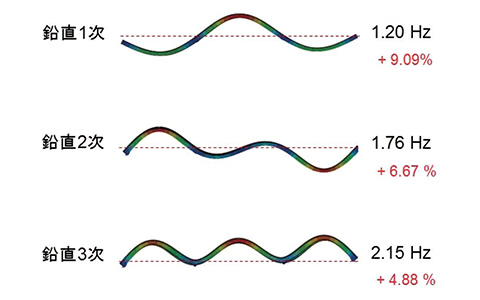
まず、計測した加速度データから、固有周波数による構造同定解析を行った。同定解析には、システム同定手法の一つであるNExT-ERA15)16)と呼ばれる手法を用いて行った。これは、車両通行による強制振動の加速度波形から自由減衰応答波形を取得し、固有周波数を求める手法である。1~3次の同定結果を図16に示す。
一方、設計図面に基づき、主桁、横桁、RC床版、ゴム支承を数値モデル化した。図17にモデル、表4にパラメータの一例を示す。また、数値モデルによる構造解析により求めた固有周波数を図18に示す。同定結果と解析結果を比較すると、両者に5~10%の差があることが分かる。これは固有周波数を特性カルテとした場合の、初期(設計値による解析)から現状(計測データ)への変化であり、この変化に影響する構造パラメータを求めることが、劣化シナリオ評価となる。
| 材料特性 | 設計値 |
|---|---|
| 鋼材ヤング係数 Es | 205(GPa) |
| 鋼材密度 ρs | 7750(kg/m3) |
| 鋼材ポアソン比 Vs | 0.3 |
| 鉄筋コンクリー卜ヤング係数 Ec | 28(GPa) |
| 鉄筋コンクリート密度 ρc | 2300(kg/m3) |
| 鉄筋コンクリートポアソン比 Vc | 0.17 |
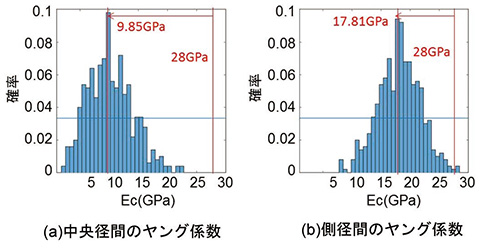
パラメータの推定にはベイズ推定を用いた。ベイズ推定は、事前の情報に、新たに得られた情報を与えて、情報を更新する数学的手法であり、事前の情報に設計値、新たに得られた情報に構造同定結果を利用することで、現状の構造パラメータを推定することができる。結果から、固有周波数の差には中央径間のコンクリートのヤング係数(Ec)が最も影響し、その値は28GPaから9.85GPaに低下しているという結果が得られた。パラメータ推定結果を図19に示す。これは中央径間にコンクリート床版のひび割れが生じている状況と一致している。また、橋梁全体(グローバル)の固有周波数から、中央径間のコンクリートヤング係数(ローカル)へ、損傷に関する特徴量の推定ができたと言える。
4.4 構造特性の評価
(1)目的
モニタリングで重要なことは、図2で示したように橋梁へのインプット情報と、アウトプット情報を比較評価することである。この対応関係は、橋梁の構造特性を表しており、劣化や損傷の原因を評価し理解するうえで重要である。そこで、4.2項で求めた活荷重をインプットとし、桁のひずみをアウトプットとした特性カルテの評価を行うこととした。
まず、活荷重と桁ひずみの関係について、構造上の意味を検討する。図20に示すように、梁に力が加わると、梁の上側は圧縮され、下側は引張られ、部材の断面には圧縮応力と引張応力が分布する。この応力の分布は、曲げ応力度σと呼び、中立軸(σ=0)から梁の上端(あるいは下端)までの距離 y と、断面二次モーメント I 、曲げモーメント M との間に式4の関係がある。
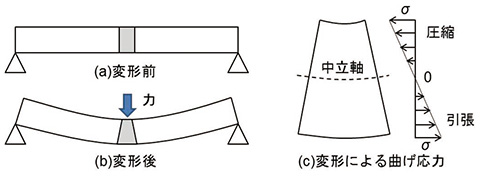

一方、図21に示すような梁を走行する活荷重 P と、梁の中央に生じるひずみεとの関係は、材料のヤング係数を E とすると、式5で表される。

したがって、式4、5から以下の関係が導かれる。

ここで、
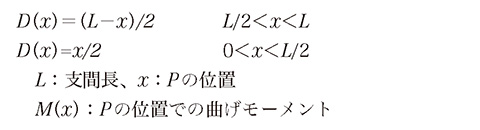
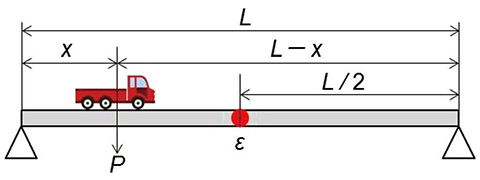
式6から、活荷重 P とひずみεの関係は、EI を表すことが分かる。EI は曲げ剛性(部材の曲げにくさ)を示すことから、この関係を指標とすることは、劣化損傷による剛性低下をモニタリングする指標として、有効であることが分かる。
(2)設置
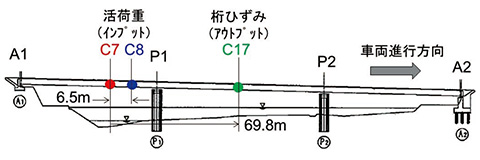
ひずみセンサの設置位置を図22に示す。コンクリート床版のひび割れが生じている中央径間の中央(図22のC17)のひずみをアウトプットとし、4.2項で求めた活荷重をインプットとする特性カルテの作成、評価を行った。
(3)評価
測定例を図23に示す。横軸に時間、縦軸に各設置位置でのひずみ量を示す。これらのデータは、走行速度、軸数などから同一車両として対応付け、特性カルテを作成した。データは、温度補正、オフセット調整を実施している。
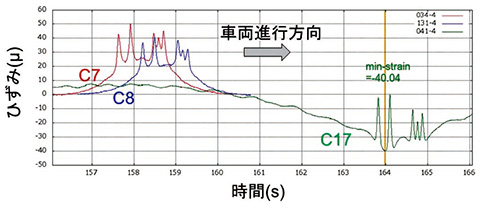
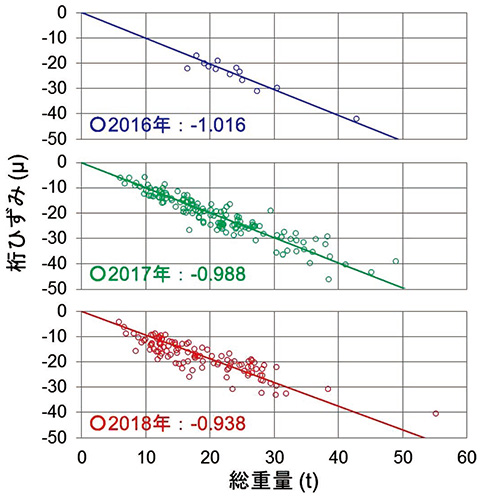
作成したカルテを図24に示す。横軸に活荷重、縦軸にC17の桁ひずみとし、2016年10月から2018年11月まで年ごとに示した。図中左下の数値はデータの近似直線の傾きを表し、式6から傾きは EI の逆数を示していることになる。
次に、構造解析による劣化シナリオ評価を実施した。ここでは、より実態に即した評価とするため、E はひび割れが生じていない側径間の値とし(Ec=17.81GPa)、中央径間のみ、ひび割れを考慮した数値モデルを作成し、I を変化させた解析を実施することとした。
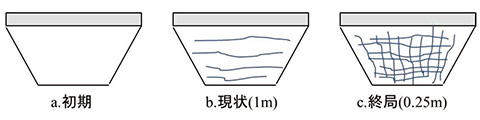
具体的には、コンクリートのひび割れによる劣化の進展に合わせ、初期状態としてひび割れが無い状態をa、現場と同様に、中央径間のみ1m間隔で橋軸直角方向にひび割れがある状態を b、終局状態として、鉄筋の配筋間隔である0.25m間隔で橋軸、橋軸直角に格子状のひび割れがある状態を c として評価を行った。ひび割れ進行のイメージを図25に、評価結果を図26に示す。
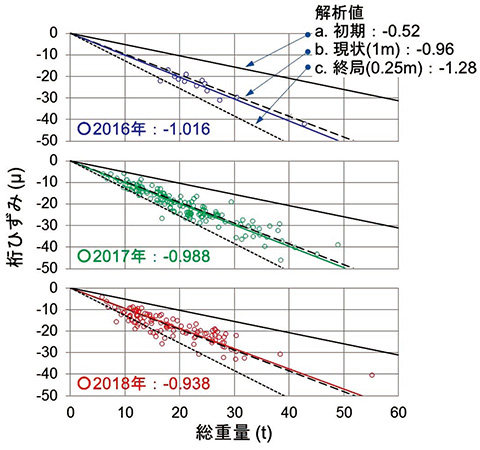
まず、現場と同様に、中央径間のみ1m 間隔で橋軸直角方向にひび割れがある状態bにおいて、カルテと解析結果が、ほぼ一致していることが確認できる。さらに、ひび割れの無い初期状態a との比較では、剛性の低下が確認され、終局状態c では、さらに剛性が低下することも明らかとなった。これにより、初期と現状、終局状態が劣化シナリオ評価により定量的に示され、健全度(現有性能)の把握が可能となった。さらに、管理基準の設定が可能であり、適切なタイミングで、予防保全による維持管理が実施可能になることを示している。
5.むすび
本稿では予防保全による維持管理の実現を目的に、客観的なデータによる健全度の把握や、使用限界を評価する手法の開発と、現場での実証を行った。対象橋梁は、建設後10年程度の比較的健全な状況であったが、提案するモニタリング手法の有効性を示すことができたと考える。以下に、本研究から得られた成果を示す。
(1)構造物の入出力応答に着目した評価指標を特性カルテとして定義し、カルテの変化に影響する特徴量を構造解析により捉え、構造物の初期、現状、終局を定量化する手法を劣化シナリオ評価として導入した。これを構造物の階層に応じた評価レベルで実施し、健全度診断と管理基準の設定を目的に5年間の実証実験を計画した。
(2)使用環境の評価として、筆者らが開発したピエゾ式ひずみセンサを用いたB-WIMにより活荷重計測を実施した。走行試験により、総重量の真値に対する計測誤差で20%以下(平均±1.65σ)を実現し、一般交通に対する重量別交通量の評価では、道路法の規定を超過する交通実態を明らかにした。
(3)基本特性の評価では、構造全体の固有振動数に着目し、加速度データによる構造同定と、数値モデルによる構造解析との比較を実施した。初期と現状の固有周波数の差は、中央径間のコンクリートヤング係数の低下によることが推定され、損傷位置が、構造全体から中央径間の床版へと、絞り込みが可能であることを示した。
(4)中央径間においては、活荷重と桁ひずみの特性カルテが、桁の曲げ剛性EIを示すという構造上の特性を踏まえ、現場で表面化しているコンクリートのひび割れの進行を想定した構造解析を実施した。その結果、カルテと構造解析による現状の一致を示すとともに、初期、終局を推定し、健全度を定量化した。
(5)また、本稿では触れていないが、湿度とACM 型腐食センサの出力から、橋梁への海塩付着量を推定し、腐食環境の評価も行った。データから厳しい腐食環境であることを把握した。さらに、実証実験中に発生した震度5弱の地震時の加速度データをトリガ計測により捉え、損傷が想定される支承部の評価も行った。地震発生前後の振動を比較し、損傷が生じていないことも評価できた17)。
(6)上記(5)を含む7種類の特性カルテによる評価を実施し、4種類において構造解析との妥当性確認、および健全度評価により、計画当初に想定した剛性低下を示す結果が得られた。
今後は特性カルテに管理基準を設定し、長期的なモニタリングによる維持管理計画の提案や、情報提供方法などを具体化しシステムの社会実装を進めていく。
謝辞
本研究の一部は、内閣府総合科学・イノベーション会議の「SIPインフラ維持管理・更新・マネジメント技術」に関連した、国土交通省の「社会インフラへのモニタリング技術の活用推進に関する技術研究開発」において得られた成果によるものである。場所を提供いただいた国土交通省の皆様に紙面を借りて感謝の意を表します。
参考文献
- 1)
- P. Choate et al. America in Ruins. The Decaying Infrastructure. Duke University Press, 1983, 115p.
- 2)
- 平成21年度国土交通白書,http://www.mlit.go.jp/hakusyo/mlit/h22/hakusho/h23/pdf/kp210000.pdf,(参照2018-12-7).
- 3)
- 斉藤成彦.構造物の維持管理における課題と展望.道路の老朽化対策に関する講演会.2016年2月29日.
- 4)
- 木村嘉富,七澤利明,澤田守.“損傷橋梁の監視技術に関する調査”.国立研究開発法人土木研究所,2009.
- 5)
- 社会インフラのモニタリング技術活用推進検討委員会.“モニタリング技術の現状と課題”.国土交通省.http://www.mlit.go.jp/tec/monitoring.html, (参照2018-12-7).
- 6)
- 国土技術政策総合研究所.多世代利用住宅の維持管理・流通を支える構造ヘルスモニタリング技術の利用ガイドライン(案).2011,p. 4-5.
- 7)
- 松井繁之.床版の技術開発-耐久性の向上施工合理化-,橋梁と基礎.1997, Vol.30, No.8, p.84-94.
- 8)
- 国土交通省道路局.“特殊車両の通行に関する指導取締りの強化について”.2008.http://www.mlit.go.jp/report/press/road01_hh_000026.html,(参照2018-12-7).
- 9)
- Dung, Cao Vu; Sasaki, Eiichi; Nishida, Hideshi; Hinoue, Tomohiko. Novel Application of PVDF Sensors for Vehicle Weight Identification in Reinforced Concrete Deck Steel Bridges. Journal of Bridge Engineering. ASCE. 2018.
- 10)
- 樋上智彦,西田秀志,宮木理恵,佐々木栄一,ジョージヴゥルペ.“橋梁モニタリング向け低消費ピエゾ式ひずみ計の開発”.土木学会第70回年次学術講演会I-441.2015,p.821-822.
- 11)
- Moses, F. Weigh-in-Motion System Using Instrumented Bridges. Transportation Engineering Journal, Proceedings of ASCE. 1979, Vol.105, No.TE3, p.233-249.
- 12)
- American Society for Testing and Materials. Standard Specification for Highway Weigh-in-Motion(WIM) Systems with User Requirements and Test Method(E1318-94).
- 13)
- COST323. Weigh-in-Motion of Road Vehicles Final Report. Version3.0, August, 1999.
- 14)
- Sasaki, Eiichi; Tuttipongsawat, Porjan; Sinsamutpaduug, Natdanai. Condition Evaluation of A Highway Bridge with RC Deck using Monitoring Data Obtained by Wireless Sensors. 1st International Conference on CASTED2018.
- 15)
- Juang, J.-N., Pappa, R.S. An eigensystem realization algorithm for modal parameter identification and model reduction, Journal of Guidance, Control, and Dynamics. 1985, Vol.8, No.5, p.620-627.
- 16)
- Farrar, C.R., James, G.H. System Identification from ambient vibration measurements on a bridge. Journal of Sound and Vibration. 1997, Vol.205, p.1-18.
- 17)
- 西田秀志,高瀬和男,黒田卓也,佐々木栄一.“省電力ワイアレスセンサによる橋梁モニタリングシステムの開発1(センサ概要)”.土木学会第73回年次学術講演会CS9-016. 2018.
本文に掲載の商品名は、各社が商標としている場合があります。