














社会インフラへのモニタリング技術の活用(1)
- モニタリング
- 省電力
- 無線
- 加速度
- ひずみ



日本国内の橋梁は2022年には橋長2m以上の橋の40%以上が完成後50年を超える高齢化時代を迎える。また、団塊世代の技術者が引退していき、国内橋梁を維持管理するための技術者不足も深刻となってきている。国土交通省は2013年を「メンテナンス元年」と位置付け、多くの施策を実施しており、最新技術の活用にも注力してきている。その中で、センサ技術を活用したモニタリングシステムは、技術者の代わりとなり、橋梁の損傷状態を監視するための技術として注目されている。
2013年から、オムロンのセンサ技術を土木分野で活用するべく、東京工業大学の土木知見と合わせ、産学連携で橋梁のモニタリングシステムの開発を進めてきた。ここでは、橋梁のおかれる現場環境に適用し、必要なセンサデータを効率良く収集するためのシステム開発成果を紹介する。
1. まえがき
2012年12月の笹子トンネルの事故以降、道路構造物の点検は非常に重要な業務となってきている。また、道路構造物、特に橋梁は2022年(平成34年)には橋長2m以上の橋の40%以上が完成後50年を超える高齢化時代を迎える1)。そのため、国土交通省は2013年を「メンテナンス元年」と位置付け1)、道路橋梁の点検に関する施策として、5年に一度の実施、かつ近接目視および必要に応じ触診や打音検査の実施を明確に示した「橋梁定期点検要領」2)および「道路橋定期点検要領」3)を策定している。この点検要領の適用および、「長寿命化修繕計画」との連携した施策により、橋梁の劣化状況の実態が把握されるとともに、補修、補強を含めた橋梁の維持管理が確実に進められてきている。
筆者らはこのような状況の中で、センサ技術を、橋梁の維持管理に活用することを目的として、2013年6月に東京工業大学に「共同研究講座」を開設し、東京工業大学が有する「構造工学・地震工学・維持管理工学」に基づく「データ分析技術」と、オムロングループが保有する「センシング技術」「無線ネットワーク技術」の融合を図った4)、維持管理に活用できるシステムの開発に取組んできた。
本稿では、定期点検間の安全性確保、構造物の継続的な性能確認、地震や台風による突発的な損傷検知を目的としたモニタリングシステムに関して、現場適用性を高めるための技術の工夫および実証結果について紹介する。
2.橋梁モニタリングシステムにおける課題
橋梁モニタリングが必要となる現場環境は、山奥、遠隔地など、人がアクセスしにくい場所、また都市内においても高架橋、跨線橋など容易に現場に立ち入ることができない場所が多く、電源の確保が困難、かつ、頻繁にメンテナンスができない環境がほとんどである。また、ケーブルの敷設は橋梁の点検や補修等の土木作業の支障となる場合もあり、極力ケーブルを排除することが必要である。
従来の計測技術においては、アナログセンサを計測装置(データロガーなど)に有線で接続し現場で計測を行う方法、計測装置のインターネット機能を使用して、遠隔地でデータを確認する方法があった。この方法では、現場での電源供給およびセンサケーブルなどの敷設も必要であり、現場環境への適応が難しく、長期設置は困難であった。そのため、短期間の計測しか実施できないため、点検間の安全性の確保や継続的、突発的な損傷の検出を実現することができていなかった。
このように、橋梁におけるモニタリングシステムでは、電源確保、ケーブルレス、長期稼働が大きな課題であり、これら課題を解決するシステムが不可欠となっている。
3.オムロンが考えるモニタリングシステム
3.1 モニタリングのコンセプト
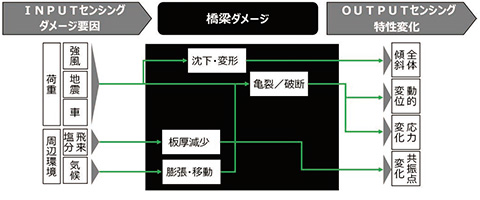
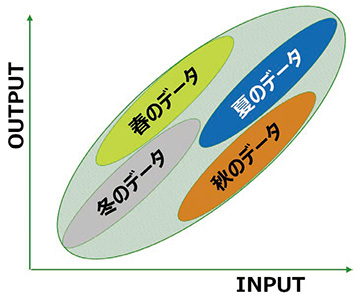
橋梁の損傷状態により外部から橋梁に作用するダメージ要因(INPUT)に対する応答(OUTPUT)が変わる。筆者らは、INPUT およびOUTPUTをセンサにより計測し、その相関を分析することで、橋梁のダメージ状態を知ることができると考えている5)6)(図1)。INPUTとしては、橋梁に外部から作用する荷重(風、地震、通行車両)や周辺環境から作用する飛来塩分、温湿度を、OUTPUTとしては、傾斜、変位、応力変化、共振点変化などの計測を行う。これら計測値は、日射や活荷重などの環境条件や計測方法によりばらつきが生じ、そのばらつきが計測結果の評価において重要な要素となると考えている。図2にばらつきを含めた相関特性の概念図を示す。相関値は季節および、昼と夜でも変化し、ある分布の中で推移すると考えられる。著者らは、継続的な計測 によるばらつきを含めた特性を把握することをモニタリングの基本としている。
3.2 システム構成
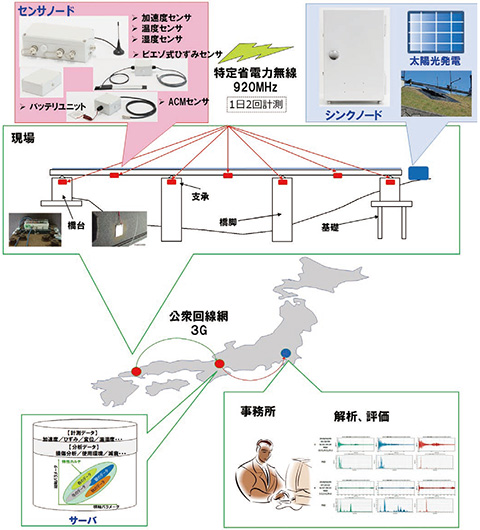
図3に実現したシステムの構成図、以下に現場に適用するための計測システムの主な特長を示す。
1)省電力化および屋外環境における信頼性確保
消費電力が極力少ないセンサを採用し、一日に2、3回程度の定期計測機能を実装することにより、計測装置としての省電力化を図っている。複数センサを接続し、無線通信機能を持った計測装置(以下センサノード)は電池で5年以上稼働し、保護構造(IP65)と結露対策を両立し、長期屋外稼働を実現している。センサノードの外観図を図4に示す。

2)簡易設置可能な無線遠隔モニタリング
計測対象橋梁内のセンサノードは920MHz帯を利用した独自プロトコルによる無線通信によりデータ伝送を行い、基地局(以下シンクノード)に集約され、公衆回線(3G、LTE)により遠隔地のサーバに保存される。管理者はインターネットを介して各地から計測データの監視、閲覧を行う。このような無線通信により、配線工事が不要となったことで従来のシステムでは1カ月ほど要したシステムの設置作業を5日間ほどで完了することが可能となった。
3)トリガ計測機能
センサノードには、時刻をトリガとする定期計測機能に加え、地震の初期振動をトリガとする地震計測機能を実装しており、さらに台風などの到来が予想されるときには、短い周期で適切なデータ量を確保するなど、異常時においても効率的なモニタリングを実施することができる。
4)多様な劣化損傷への対応
センサノードは、現場環境に応じて必要な計測が行えるよう加速度、温湿度センサ、さらに、ひずみ、ACM(Atmospheric Corrosion Monitor型腐食センサ)などのセンサを外部接続可能な構成とした。また、GPSを活用した高精度時刻同期により、各センサノード間の時刻誤差を5ms以下とし、複数地点の計測により振動モードのような面的分析に必要なデータを取得することができる。
4.モニタリングシステムの要素技術
社会インフラのモニタリングにおいて加速度データは変位分析、構造同定、構造パラメータ分析などに有効であり、ひずみデータは活荷重計測、中立軸、桁ひずみなど、局所的な状態評価に有効である5)6)。橋梁の劣化損傷を評価するために必要な精度として加速度センサ、ひずみセンサは200Hzでサンプリングを実施し、低周波領域(~50Hz程度)を主な計測範囲とする必要がある。本システムでは、電池駆動を可能とするため、必要な精度を確保しながら極力消費電力の小さいセンサを採用した。また、システムコストを抑えてセンサノード間の同期を実現するための時刻同期についても、独自の手法で実現した。ここでは、搭載している加速度センサ、ひずみセンサおよび時刻同期技術について紹介する。
4.1 加速度センサ
加速度センサは、構造物の特性評価に必要な振動特性を計測するための重要なセンサである。従来は、地震計に搭載されるような高精度なサーボ型加速度計が利用されてきた。しかし、モニタリングに活用するには消費電力も大きく、高価である。ここでは、センサの特徴、精度に関して、センサノードとサーボ型加速度計の比較評価を実施して、目的に適したセンサを採用した。
1)加速度センサの特性比較
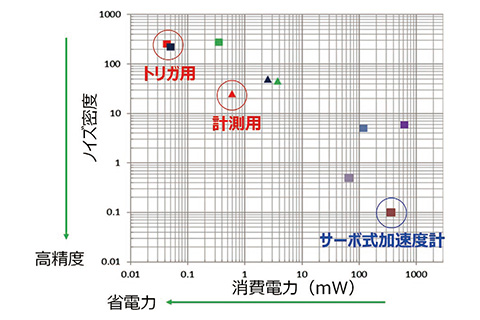
センサノードには、トリガ用および計測用の2つの加速度センサを搭載している。図5に示すように、トリガ用センサは最も消費電力の小さいものを採用し、計測用センサは、維持管理の挙動把握に必要な精度を確保しつつ、極力消費電力が少ないものを採用した。これにより、普段は消費電力の少ないトリガ用加速度センサ以外をスリープ状態にすることでシステムとしての電力消費を最小限に留めている。
2)加速度センサの活用方法による比較
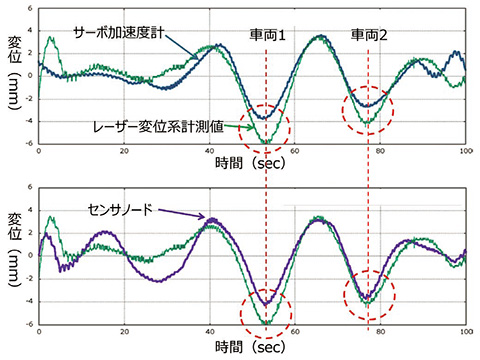
加速度センサは、微小な振動を捉えるために、そのノイズ特性が重要な要素となる。特に、変位を計測する場合には低周波領域の誤差が大きく影響する。図6に加速度から2回積分により変位を求めた場合の比較結果を示す。レーザ変位計の計測値を真値とし、サーボ式加速度計およびセンサノードで同一箇所の加速度から桁の変位を求め、結果を比較した。車両通過時の変位に対して、車両1、車両2が通過した時の変位換算の誤差は、サーボ式加速度計で振幅比0.81、相関係数0.83、センサノードで振幅比1.00、相関係数0.8となり、橋梁特性評価における差は無視できるレベルと判断できる。
4.2 ひずみセンサ
ひずみセンサは、構造物の局所的な状態を把握するため、損傷発生箇所周辺の部材に作用する応力の計測に用いられる。従来ひずみ計測時にはひずみの変化に比例して抵抗値が変化する金属抵抗材料を使用したひずみゲージが使用されていた。しかし、ひずみゲージは耐久性、消費電力の課題からモニタリングに活用できない。著者らは圧電素子を活用した消費電力の小さい「ピエゾ式ひずみセンサ(以下ピエゾセンサ)」を採用している7)。図7にピエゾセンサの外観図を示す。

1)ピエゾセンサの特長
「ピエゾセンサ」は、「ひずみ」に比例して電荷を出力する圧電素子(PVDF)から構成されており、ほぼ電力供給なしでひずみの計測が可能である。ピエゾセンサから出力される電荷を専用アンプで電圧に変換しセンサノードに接続して計測する。専用アンプにおいても各回路で最適化を行い、一般的なひずみゲージの消費電流30mA に対し、1/100の消費電流0.3mAを実現した。
ピエゾセンサは、車両通行や地震動などによって橋梁に力が加わった際に発生する動的な応答を計測する動ひずみ専用のセンサであり、消費電力、耐久性の面から長期間計測が必要なモニタリングシステムに最適である。
2)ピエゾセンサの計測精度
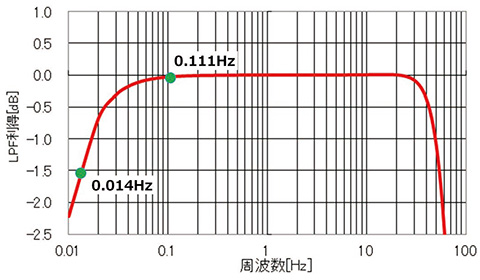
ピエゾセンサは、発生する電荷をチャージアンプによって電圧に変換する構造となっている。アンプ回路の特性は、図8に示すように、低周波、および高周波側で減衰するフィルタ特性を有する。橋梁での計測において、桁ひずみは、車両通過による半波長の強制振動となるため、センサの出力電圧として現れる信号の周波数は、支間長と車両の走行速度で決定される。支間長を50mとした場合、40km/hで走行する車両通行時の桁ひずみの振動は0.111Hzとなり、5km/hで走行する車両の場合は、0.014Hzとなる。
通常速度で走行する車両においては、特性評価に十分な精度を確保できている。しかしながら、渋滞などによる低速走行が発生する場合は、出力の減衰が大きくなるため、停止線付近での計測を避ける、または複数個所の計測時刻から速度を推定し、低速走行によるデータを評価対象から除外するなど、計測場所、評価方法に留意が必要となる。
4.3 高精度時刻同期技術
1)時刻補正方法
センサノードの時刻同期を行うには、センサノード毎にGPS装置を取付け、個別に時刻同期することが最も高精度な方法である。しかし、1箇所で複数個のセンサノードを設置する場合、システムコストが高くなってしまうことが課題である。本システムでは、システムに1台のGPS装置でシンクノードからセンサノードに時刻を配信する構成としている8)。図9に無線時刻同期システムの構成図を示す。
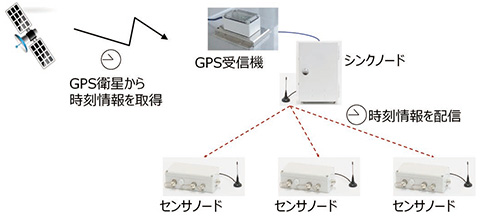
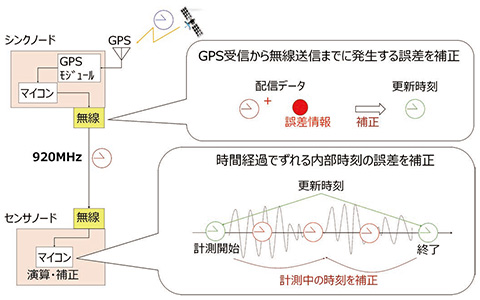
図10に主な時刻補正の処理について示す。GPSから時刻を受信し、シンクノードに送信するまでの間に発生する遅延分を、時刻情報と一緒にセンサノードに送信し、センサノードで受信した時刻を補正する。また、センサノード内部クロックの誤差により発生するサンプリング周期の誤差については、計測開始および計測終了時の時刻と計測回数から、サンプリング毎の時刻を高精度に補正する。計測中のすべてのサンプリング時刻において誤差5msec以下の精度を実現した。
2)高精度時刻同期による効果
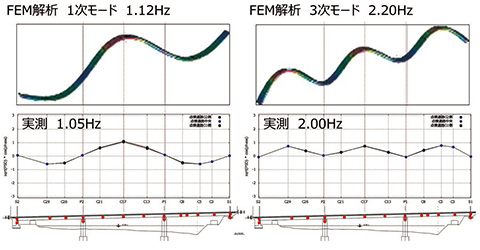
複数個所のセンサノードにおいて、各箇所の挙動を相対的に可視化でき、橋梁がどのように揺れているのかを把握することが可能となる。図11に振動モード形状のFEM解析結果と実測結果を示す。各計測地点の同期がとれているため、解析と同様のモード形状を確認することができた。
5.長期信頼性を確保するための実装
長期稼働を実現するためには、省電力センサの活用だけでなく、計測回数、計測時間の最適化による省電力化が必要であり、また、屋外での長期稼働を確保するためには、センサとしての性能を維持しつつ、防塵、防水と高い耐候性を実現しなければならない。ここでは、長期信頼性を確保するための実装面での工夫を紹介する。
5.1 省電力電源回路
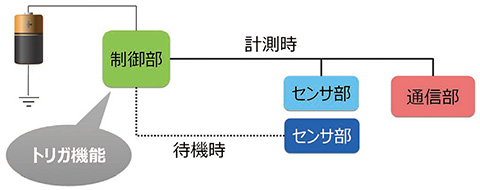
センサノードには、待機時、計測時、通信時に電力供給経路を切替え、必要な電力のみを消費する独自の電源制御回路を搭載している。図12に概念図を示す。センサノード回路は通常待機の状態(図の破線の経路)で動作している。この時点では超省電力のトリガ用加速度センサのみが動作しており消費電流は小さい。制御部に計測を開始するためのトリガが入力されると、図の実線経路に切替わり、計測用加速度センサおよび通信回路が動作する。一定の計測時間が終了すると、再び待機時に戻る。この制御により、待機時の電力を大幅に削減し、電池駆動で5年以上の計測を可能とした。表1に本制御搭載前後での消費電流の計測結果を示す。トリガ制御搭載前後で、計測時、通信時の消費電流は変化がないが、待機時の消費電流が大幅に改善されていることが分かる。これはトリガ制御回路を追加することで、待機時に高精度センサ、通信回路への電流供給がカットされ、超省電力のセンサのみに電流供給されるように制御しているからである。
| 動作モード | 搭載前 | 搭載後 | 改善効果 |
|---|---|---|---|
| 待機時 | 2.55mA | 0.02mA | 99%削減 |
| 計測時 | 6.4mA | 6.4mA | ― |
| 通信時 | 32.0mA | 32.0mA | ― |
5.2 ピエゾセンサの長期信頼性確保
一般的なひずみゲージによる計測においては、長くても2年程度の耐久性しか担保されておらず、長期モニタリングを実施するための信頼性を確保できていない。
ピエゾ式ひずみセンサで長期信頼性を確保するため、保護構造を独自に開発し、10年利用可能な耐久性を確保した。
図13 にピエゾセンサの層構造を示す。ピエゾ素子(PVDF)自身は高い耐候性を有するが、電荷を取り出す電極の劣化および電極を絶縁するためのフィルム(PET)の加水分解により経年劣化の課題がある。一方で単純な保護を実施し、耐候性を強化すると、弾性率の関係からピエゾ素子へのひずみ伝達特性が悪くなる。その対策としてピエゾ素子の弾性率と近く、耐候性の高いポリカーボネートをベース板として採用し、センサ上部には、耐候性は高いが弾性率の低いブチルゴムテープを採用した。
こうすることで、弾性率の関係が、構造物>ベース板=ピエゾ素子>ブチルゴム(上部保護)となり、構造物のひずみがピエゾ素子にそのまま伝わり、かつ上部の保護材がひずみ伝達を阻害しない構造を実現できた。
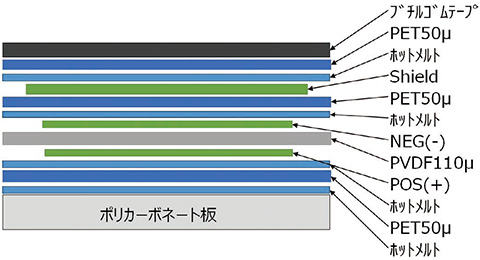
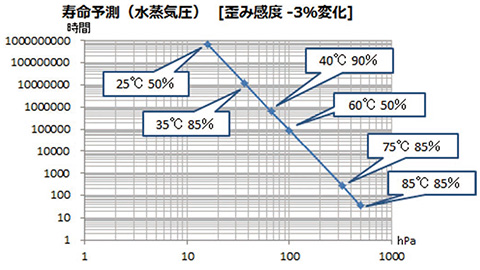
図14に温湿度加速試験のデータを絶対水蒸気圧モデルに当てはめ、寿命を予測した結果を示す。60℃の環境においても10年相当の寿命を満足できており、橋梁等における屋外環境でも、長期計測可能であることを確認した。
5.3 トリガ計測機能
図12に示す電源制御回路において、計測、通信を開始するトリガ機能が重要となる。適切なトリガを制御部に入力し、電源回路を制御することで、消費電力を運用に合わせて最適化でき、長期運用が可能となる。以下に主なトリガ機能について紹介する。
1)定期計測機能
センサノードの内部時計により、トリガを駆動する機能である。開始時刻および計測間隔を自由に設定し、計測周期を設定することができる。劣化損傷のようにゆっくりとした変動を計測する場合は、本機能により定期的な長期間計測を行う。現場実証においては、開始時刻を午前3時、計測間隔を12時間と設定し、午前3時、午後3時の1日2回の計測周期で計測を実施した。またこれら設定はシンクノードを通じて遠隔からも設定の変更が可能である。
2)地震計測機能
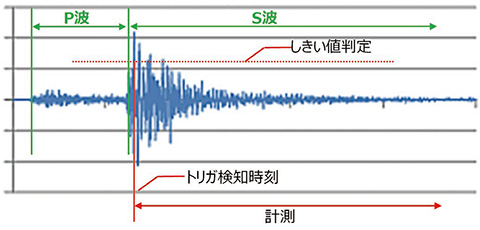
センサノード内部に搭載された、トリガ計測用加速度センサで、振動レベル(振幅)を判定し、指定する震度相当の振動レベルを検知した時に回路を切り替え、計測を実施する。図15に地震計測機能の概念図を示す。通常しきい値は、計測したい地震の震度に相当する加速度の値(gal値)をしきい値として設定する。震度4の場合は20gal程度、震度5だと70gal程度となる。しきい値を超えた時点からの計測となるため、P 波の計測はできないが、橋梁の特性を評価するには十分なデータを計測することができる。
5.4 自動しきい値設定機能
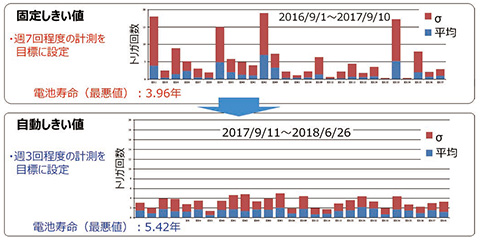
橋梁のモニタリングにおいては、図16のように、支点部、径間部のように複数個所の計測を行う。橋梁では、計測位置により、必ずしも震度に相当する加速度が発生するとは限らず、計測位置によりばらつき、その振動特性は異なる。そのため、固定しきい値とした場合、図17の上段に示すように、計測位置によりトリガ回数が大きくばらつく。この場合、計測位置によっては、不要な計測回数が増え、電池の余寿命の予測が困難となる。

そこで、橋梁での地震計測を行う場合は、計測位置毎に、通行車両や風の影響による通常の振動を超える振動を地震発生と判断する方法を採用している。具体的には、普段の加速度データのピーク値の統計を取り、過去1週間の統計データから、1日平均のトリガ回数を推定し、発生頻度からしきい値をセンサノード毎に設定する9)方法である。この方法を採用することで、図17の下段に示すように、計測位置によるばらつきを抑え、電池寿命を平滑化し、システムとしての電池余寿命の予測を可能とした。その結果、長期運用設計を可能とすることができた。
6.計測結果
「SIPインフラ維持管理・更新・マネジメント技術」に関連した、国土交通省の現場実証において、2014年~2018年の間に、実橋梁で本モニタリングシステムを活用して継続的な計測を実施した。本現場実証では、著者らが提案するモニタリングにおいて、継続的な計測によりばらつきを含めた特性を把握し、その特性から橋梁の維持管理に活用可能な指標を見出すことを目的としている。ここではその中で得られた実橋梁の特性を紹介する。現場実証の対象橋梁は、2007年3月に供用を開始した、橋長232m、支間長71.3m+88.0m+71.3m の鉄筋コンクリート床版を有する3径間連続鋼2箱桁橋である。
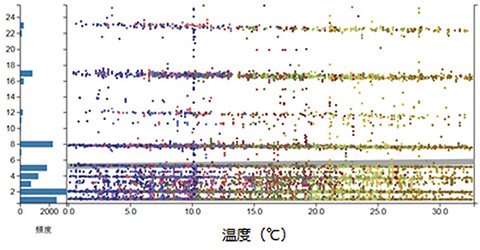
6.1 固有周波数
固有周波数とは、構造物が自由振動した際に現れる構造物が持つ固有の周波数のことである。損傷などにより構造が変化した場合にはこの固有周波数も変化することになり、また、地震などの強制振動による振動がこの固有周波数と一致すると共振を起こし、構造物の破損につながることもある。固有周波数を把握しておくことは橋梁の特性を把握する意味で非常に重要である。図18に横軸を温度とし、縦軸を鉛直5次までの固有周波数の値を示す。年間の温度変化による変動は、高次になるほど若干低下することがわかり、各次数において計測値には±0.3Hz程度のばらつきを確認した。この温度特性、ばらつきを含めて、対象橋梁の平常時の剛性特性を表すものである。
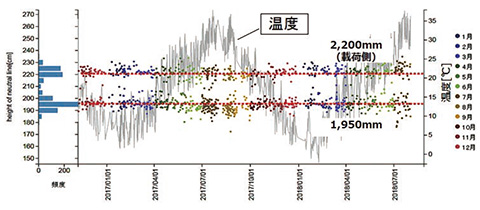
6.2 中立軸
桁などの部材にたわみが発生する場合に、桁の上部と下部で圧縮力と引張力が発生する。断面内でこの圧縮力と引張力が釣り合う位置が中立軸であり、剛性低下の診断において、橋軸方向での断面で中立軸を把握することは断面応力の把握に有効である。桁上下フランジにひずみセンサを設置し、それぞれの引張、圧縮ひずみから中立軸を算出した。図19に横軸を時間軸、縦軸を下フランジから中立軸までの距離として、2016/9~2018/7まで計測した分布を示す。対象橋梁では、ねじれの影響により2つの中立軸が存在することが分かった。この中立軸の位置変化も対象橋梁の剛性特性を示す指標となる。
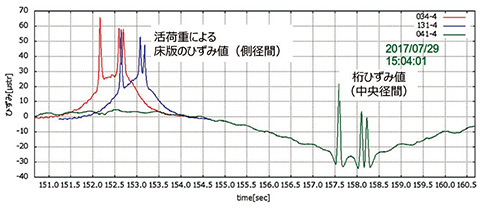
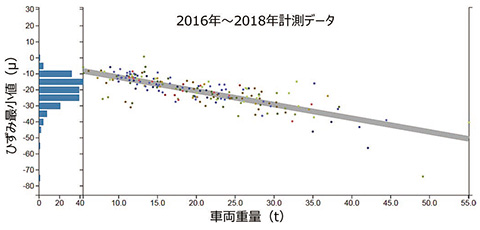
6.3 活荷重と桁ひずみの相関
平常時のINPUT情報としての活荷重(橋梁を通行する車両の荷重)のモニタリングは有効であり、INPUTに対する橋梁の応答(OUTPUT)として桁のひずみ(車両通行時に発生する桁のひずみ)を計測することで、剛性低下の可能性を評価できる。図20に計測データの例および、図21に横軸を活荷重、縦軸を桁ひずみとした相関図を示す。図21の傾きは桁の曲げ剛性により関係付けられる。この傾きも橋梁の剛性特性を示すものであり、剛性変化のモニタリングに活用できる指標と考えられる。
7.むすび
本稿では、社会インフラの維持管理へ適用が可能な常設型モニタリングシステムにおいて、筆者らが開発を進めているシステムにおける主な技術および計測結果例を示した。本システムにおける技術は、新規性を持ったものではなく、電気、通信技術の中で、既に数年前から技術的に確立しているものである。その技術を土木現場に適用できるように、工夫を加え、省電力化や無線化を実現し、その中で耐久性や信頼性の確保を図った。本システムから出力されるデータは土木技術者に分かり易いように、構造同定などの土木知見により、構造物の劣化、損傷情報に変換して提供する必要がある。このように、電気-情報-土木の融合で実現する技術が土木分野におけるIoT技術であり、今後のCPS社会を支える技術となると考える。
今後は、この技術が土木技術者の中で広く使っていただけるよう、現場での実績、使い方の改善を行い、現場実装を進めていく予定である。
最後に、本研究は、内閣府総合科学技術・イノベーション会議の「SIPインフラ維持管理・更新・マネジメント技術」に関連した、国土交通省の 「社会インフラへのモニタリング技術の活用推進に関する技術研究開発」によって得られた成果を利用している。計測の場所を提供していただいた国土交通省の皆様、開発当初からご指導をいただいた東京工業大学の佐々木栄一先生に紙面を借りてお礼を申し上げる。
参考文献
- 1)
- 国土交通省広報誌.社会資本メンテナンス元年.国土交通.2013,No.122, p.4-5.
- 2)
- 国土交通省道路局国道・防災課.“橋梁定期点検要領”.2014.6.
- 3)
- 国土交通省道路局.“道路橋定期点検要領”.2014.6.
- 4)
- オムロンHPニュースルーム,ニュースリリース2013.“異なる専門分野(土木×電気)で産業連携し,社会インフラの老朽化に対する維持管理分野の新技術構築を目的としたモニタリングシステムの共同研究を開始”.オムロン.https://www.omron.com/jp/ja/press/2013/08/s0807.html, 2013.8.7.
- 5)
- 黒田卓也,西田秀志,高瀬和男,佐々木栄一.“省電力ワイアレスセンサによる橋梁モニタリングシステムの開発2(特性カルテ)”.土木学会第73回年次学術講演会CS9-017.2018.8.
- 6)
- 佐々木栄一,Natdanai Sinsamutpadung,Poejan Tuttipongsawat,黒田卓也,西田秀志,高瀬和男.“省電力ワイアレスセンサによる橋梁モニタリングシステムの開発3(特性分析)”.土木学会第73回年次学術講演会CS9-018.2018.8.
- 7)
- 樋上智彦,西田秀志,宮木理恵,佐々木栄一,ジョージヴゥルペ.“橋梁モニタリング向け低消費ピエゾ式ひずみ計の開発”.土木学会第70回年次学術講演会I-441.2015, p.821-822.
- 8)
- 赤井亮太,西田秀志他.“橋梁ヘルスモニタリング向けワイアレス時刻同期システムの開発”.土木学会第70回年次学術講演概要.2015,Vol.70, I-410.
- 9)
- 西田秀志,高瀬和男,黒田卓也,佐々木栄一.“省電力ワイアレスセンサによる橋梁モニタリングシステムの開発1(センサ概要)”.土木学会第73回年次学術講演会CS9-016.2018.8.
本文に掲載の商品名は、各社が商標としている場合があります。