














空気清浄機向け微小粒子検出センサ開発
- 空気清浄機
- 微小粒子検出センサ
- 高感度フォトIC
- 集塵構造
- 高周波フィルタリング


微小粒子状物質PM2.5による大気汚染が話題となり人々の関心が高まっている。PM2.5を検出するセンサは、我々の身近なところでは、空気清浄機に搭載され、我々の日常生活の中にも浸透しつつある。一方で、従来の粒子検出センサではPM2.5粒子を高精度に検出するには十分な性能に達していない。PM2.5粒子の検出精度を上げる為には、より微小な粒子に対して感度を高めること、また検出部に効率的に粒子を流入させることが重要である。
本開発では、独自の光学系及び集塵構造を伴う流路構造により、粒径0.5 µmの微小粒子まで検出できる高精度な粒子検出センサを、光散乱方式を用いて実現させた。
1. まえがき
近年、粒径2.5 µm以下の粒子を含む、微小な粒子状物質、いわゆるPM2.5による健康への影響が明らかにされ、注目を集めている。
PM2.5の発生源としては、工場のばい煙や自動車の排気ガス、火山灰等があるが、身近で代表的なものとしてはタバコ煙が挙げられる。タバコ煙に含まれる粒子は1 µm以下の微小粒子で、特に室内環境での微小粒子発生源として分かりやすいため、空気清浄機の集塵性能試験において、タバコを用いた試験が日本電機工業会の標準規格として定められている。
微小粒子の計測方法としては、大気を吸引してフィルタ上に粒子状物質をろ過捕集するフィルタ法、またその自動測定を目的としたフィルタ振動法、β線吸収法、さらに簡易の測定方法として光散乱法等が挙げられる。
測定方法としては、フィルタ法が最も信頼性の高い測定方法とされており、フィルタ振動法、β線吸収法もそれに準ずる測定方法として、環境省大気汚染物質広域監視システム(通称:そらまめ君)にも採用されている 1)。
一方でこれらの方法は非常に大型で高価であることから、小型ローコストでリアルタイム計測が可能な光散乱方式が、家庭用空気清浄機などに組み込まれ、身近な粒子検出センサとして普及している。
しかし、従来の粒子検出センサでは最小検出粒径が1 µm程度、とタバコ煙を含む微小粒子を検出するには十分とは言えず、また計測のバラつきも大きいため、空気清浄機での効率運転を促すうえでも、高精度な微小粒子検出センサへのニーズが高まってきている。
2. 計測原理
本センサは、大気中の微小粒子を光散乱方式によって計測し、通過粒子の検出信号をパルスにて出力するセンサである。
全体構成としては図1に示す通り、微小粒子を検出領域に到達させるための粒子導入部、検出領域に到達した粒子に対し光を照射し、照射した光が粒子に当たり散乱したときの散乱強度を検出する検出部、散乱光信号を処理する増幅回路と演算処理部、粒子を排出する粒子排出部に分かれる。
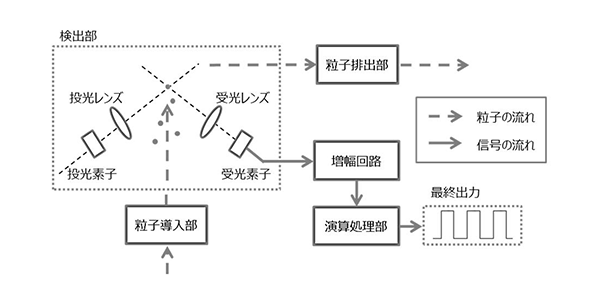
以下に、光散乱方式のコアとなる、検出部と粒子導入部の機能について述べる。
2.1 検出部
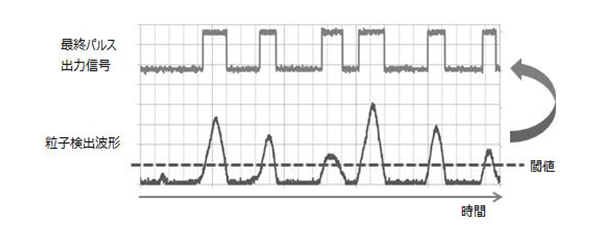
光散乱方式の粒子検出センサでは、検出領域に到達した粒子に対し、投光素子から光を照射した際に生じる散乱光を検出することで粒子を検出する。投光素子と受光素子にはそれぞれ検出領域に対して集光光学系をとるよう非球面レンズを配置し、受光信号の強度を確保している。受光した信号は光電変換により、電気信号に変換され、後段の処理回路に伝達されることとなる。図2に粒子検出時の信号波形のイメージを示す。粒子通過に応じて散乱信号が出力されるため、一定の閾値を引くことにより粒子の通過を検出することができる。
この検出部でどれだけのS/N比が確保できるかで、最小検出粒子径が変わってくる。S/N比が低いと微小粒子からの受光信号がノイズに埋もれ、検出できなくなる為である。すなわちS/N比が高ければ高いほどより微小な粒子まで検出が可能となる。
2.2 粒子導入部
もう一つの重要な構成要素が粒子導入部である。
粒子の検出原理は2.1項で述べた通りであるが、検出領域に粒子が到達しなければその機能を発揮することはできない。粒子をスムーズに検出領域に導くのが粒子導入部の役割である。
粒子導入の為には空気の流れを作り出す必要がある。その方法としては、撹拌ファンを用いて強力に外気を取り込む方法や、抵抗器加熱により大気に温度差を発生させることで生じる上昇気流を利用する方法がある。
その選択は、用途によって異なってくるが家庭用空気清浄機等に組み込まれる簡易的な粒子検出センサの場合は市場のコスト要求から抵抗器加熱方式を採用することが多い。本センサにおいてもこの抵抗器加熱方式を採用している。
この粒子導入部で流入量を確保し安定的な流れを作ることは、検出のバラつきや誤差の軽減につながる為、センサの精度に直結してくる。
3. 技術的課題
前述の通り、微小粒子の計測精度を高めるためには、
①S/N比を上げてより微小な粒子まで正確に検出する
②流入量を増加させ検出バラつきを抑える。
ことが必要となってくる。
従来、家電組込系の小型センサにおいては、①②のいずれも十分な性能を確保できていない為、結果として検出精度が低くバラつきが大きい結果となっている。
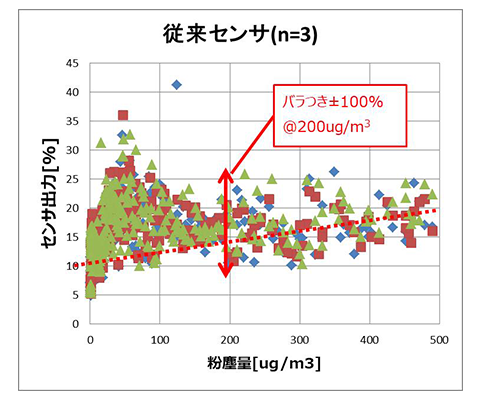
図3は従来センサでタバコ煙を測定し、粉塵濃度計測装置との相関を測定したグラフである。バラつきが大きく相関性が低いことが分かる。
以下に、①②それぞれに対する課題について述べる。
3.1 S/N比確保に対する課題
微小な粒子への検出性能を上げる為には、まず散乱信号の強度を上げる必要がある。信号強度を上げる為には、投受光の強度/感度を上げることや回路上のゲインを大きくすること等、一般的な方法で実現可能ではあるが、当然ノイズの影響も大きくなる。とりわけ粒子検出センサにおいては1 µmや0.5 µmといった微小な粒子からのわずかな散乱光を取り出す必要がある為、ノイズ信号をいかに低減できるかが大きな課題となる。
加えて、家電品に組み込む都合上、ケースを大きくすることができず、検出領域を通過した光は全てケース内を散乱することになる。この光が受光部に到達し定常的な出力が発生することになる。このような粒子からの信号光以外の予期せぬ光を"迷光"と呼ぶ。この迷光が大きなノイズ源となりS/N比向上の妨げとなる。
3.2 流入量確保に対する課題
光散乱方式の粒子検出センサは、検出領域を通過する粒子を確率的に捉え信号検出する検出手法である。そのため、粒子の流入量の確保は、検出機会を上げるという意味で、検出精度に大きく関わってくる要素である。
機器組込センサにおいては、コスト的な要求から安価なヒータ抵抗を用いて上昇気流を発生する抵抗器加熱式構造をとることが多い。この場合、上昇気流の空気の流れをいかに効率的に検出領域に誘導する構造とするかが重要となってくる。
一般的に物体の周りを粘性のある流体が流れる際、粘性の働きによって物体の表面付近に境界層が形成され流速が低減する。理論的には図4のようなモデルで表され、半径aの円管に流体が流入した場合、平均流速は円管半径の2乗に比例することが分かる 2)。
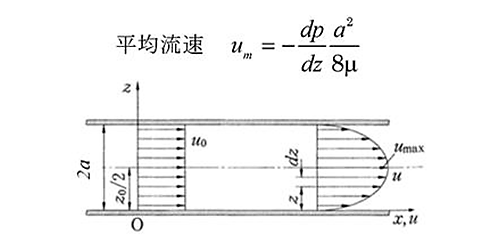
流速と流入量は比例関係にある為、小型化によりケース壁面が流路に接近することは流速が低減し流入量の低下を招く。一方で、流入量を確保しようと空間を広げるとセンサケースが大型化してしまう、このトレードオフにより流入量を確保することが難しくなっている。
4. 技術内容
前述の課題に対しての取り組みと解決に導いた構成について以下に記す。
4.1 ノイズ低減への取り組み
本センサにおいては、まず0.5 µm粒子のからの微小な信号を検出するために、高感度フォトIC(PIC)を新たに開発し検出信号強度の増加を試みた。PICの構成はシンプルなもので、フォトダイオードと電流増幅回路をワンチップ内に納めたものである。したがって、PICの感度は、内部の電流増幅回路により決まり、かなりの自由度がある。
しかし、前述の通り、感度を上げすぎるとケース内の迷光の影響が大きく出力が飽和してしまう可能性がある。
迷光を除去する方法としては、迷光をセンサ外に放出することが最も効率がよい。しかし、光学系が開口部に向くことで外乱光が大量にセンサ部に入光する恐れがあるため、この構造をとることができず、従来センサでは十分な迷光低減ができていなかった。結果、信号強度の確保が難しく、微小粒子の検出が困難となっていた。
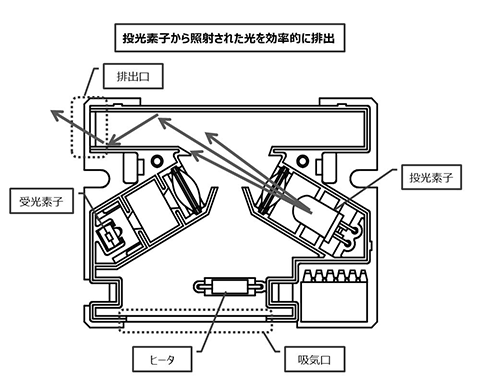
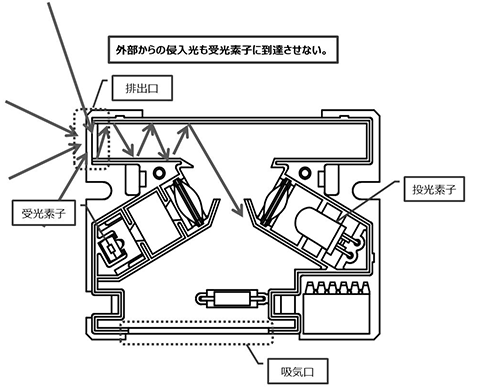
しかしながら、本センサでは、粒子排出口を、敢えて投光素子の対向方向に設けることで迷光の大部分をセンサ外部に捨てることを考えた。この際に、開口部を光路の延長線上とするのではなく、一定の角度を設けることにより筐体内の反射を促しながら、迷光をセンサ外へ誘導することに成功した(図5)。また逆に、当構造をとることで、外部から侵入する光に対しても容易に受光部へ到達しない外乱抑制の効果も同時に得ることができた(図6)。
これにより、迷光レベルを従来センサの1/5以下に抑えることができた。
次に、上記構造により取り出した光信号に対して、以下の通り電気ノイズの除去を行った。
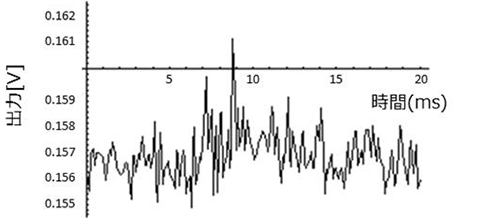
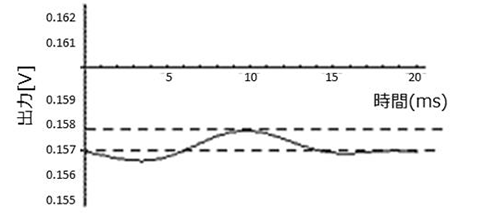
電気的ノイズは高周波成分を多く含んでおり、粒子検出信号の周波数を鑑みて適正にフィルタリングする必要がある。本センサにおいては、抵抗加熱による上昇気流を利用している為、微小粒子の流入速度は遅く概ね100~500 Hz程度で検出領域を通過するため、1 kHz以上の信号はノイズとみなすことができる。高周波をフィルタリングし微小粒子の信号周波数を選択的に増幅することにより、従来センサでは検出困難であった0.5 µmの標準粒子に対して、十分なS/N比を得ることができた。高周波フィルタリング前の波形を図7に、信号処理によって高域の信号をカットした波形を図8に示す。
4.2 流入量に対する取り組み
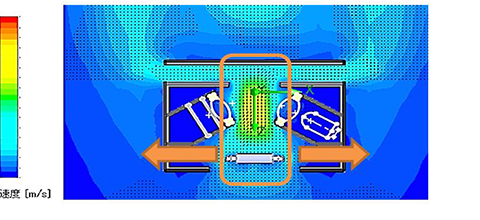
3.2項で述べた通り、流路に対して境界面が少ないほど流入量の損失は少なくなる。そのため、まずは流入量を確保するために小さな筐体の中でいかに空間を広げるか、という検討を進めた(図9)。
確かに、筐体内の空間を広げることは流入量を上げる結果につながる。しかしながら、重要なことは流入量を単に増加させることではなく、検出領域内での粒子密度をいかに確保するかという点だという発想に至った。
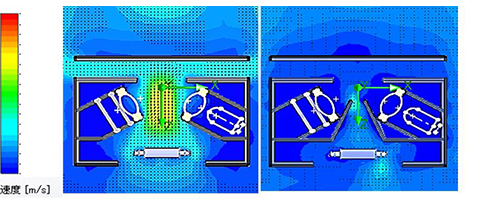
そこで、検出領域に向かって流路を狭める構造をとることを考えた。これは検出領域に向かって粒子を効率的に収集することを目的としている(図10)。
但し、当然のことながら流路の絞りを小さくしすぎると流入量を著しく低下させてしまう(図11)。
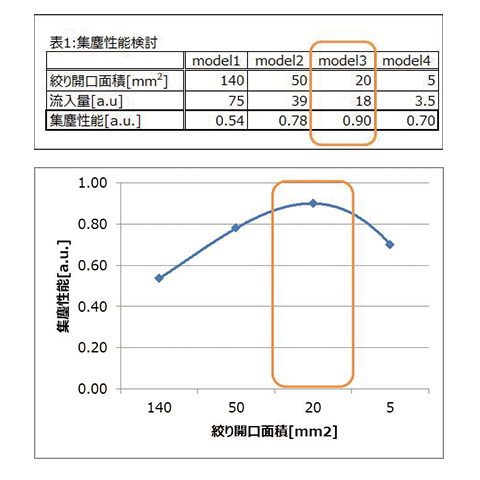
従って、絞り開口部面積と流入量をパラメータとし最適な絞り形状を決定する必要がある。
集塵性能は、流入量と絞り部開口面積の比率で表すこととする。これは流入した微粒子がどの程度検出領域に収集されるか、という指標である。
複数のモデルで集塵性能指標を評価することにより最適な構造を導き出し、従来センサに対して6倍の検出効率を実現した(図12)。
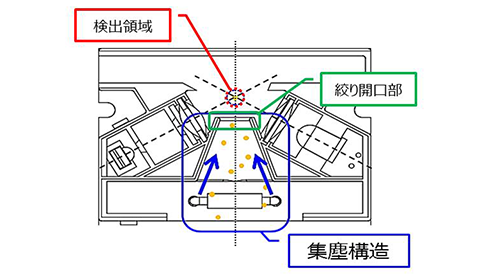
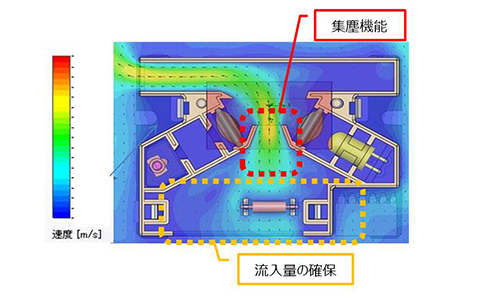
本構造は、吸気口付近は空間を広げ、流入量を確保しつつ、検出領域近傍から粒子を誘導する漏斗状の集塵構造を形成することで、"流入量の確保"と"集塵機能"を両立させたハイブリッド機構とも言うべき構造である(図13)。
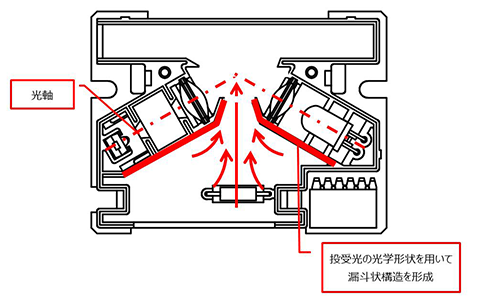
加えて、この集塵構造を、投受光の光学形状を利用して形成したことによって、光学形状と流路を一体化し小型化を同時に実現しているところを特徴としている。漏斗形状のテーパ角度を二段階で変化させることで、流体の流れを妨げる抵抗を下げると共に、光学的にも迷光を抑制する機能も実現し、流路・光学双方の機能を高める構造としている(図14)。
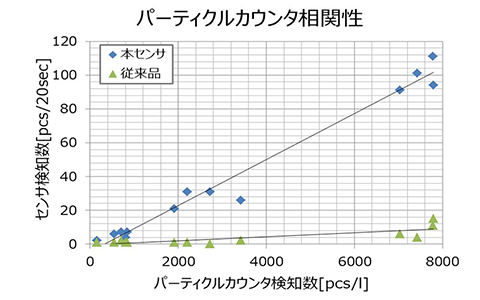
本構造による検出機会増加の効果を確認するため、パーティクルカウンタを用いて粒子検出数の比較を行った。図15に示す通り、従来品に対して粒子検知数量が飛躍的に増加していることが分かる。
5. 効果
前述した2つの取り組みの効果を空気清浄器の規格(GBT 18801-2015)に基づいて確認した結果を示す。
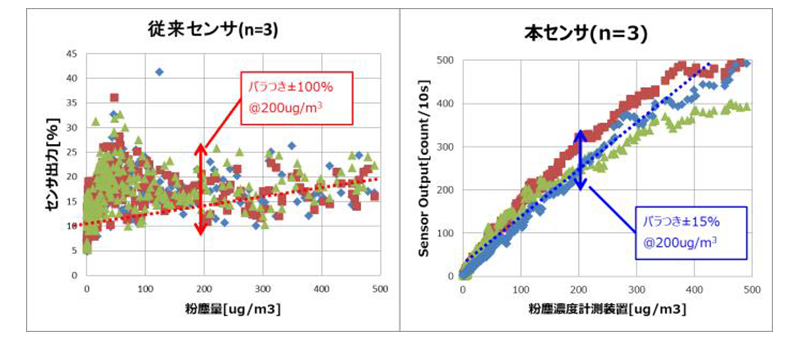
測定は上記規格に準じ、密閉された空間内において、たばこ煙濃度を変動させるという環境で実施し、その際の粉塵濃度計測装置に対するセンサ出力変動の相関を確認した(図16)。
その結果、タバコ煙環境下において粉塵量濃度計測装置に対するばらつきを、従来センサが±100%に対して新センサは±15%に低減した。
また、PM2.5が飛散している一般環境に対して本センサを適用した場合について確認を行った。
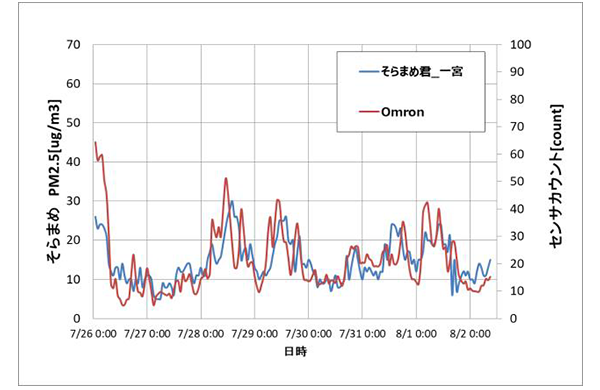
図17は各都道府県などが設置している大気汚染物質広域監視システム(そらまめ君)のPM2.5測定結果(赤線)対して、本センサの粒子検出数(青線)の相関を確認したグラフであり、愛知県一宮市で8日間に渡って測定を行った。その結果、本センサの測定結果は赤線が示すPM2.5の増減に追従できており、相関係数0.79という相関を得ることができた。相関係数は一般的に0.6以上で相関性があるとされており、十分な相関関係を示していることが分かる。
6. むすび
微小粒子検出センサとして、新たな光学形状と流路構造を組み合わせることにより、0.5 µmまでの微小粒子の検出が可能な、そして大気中測定でも従来センサに比べ非常に高い相関精度を持ったセンサを開発した。
粒子検出センサのニーズは、PM2.5への関心の高まりとともに、今回ターゲットとしている空気清浄機以外にも、エアコンや掃除機への搭載、また身近に常時モニタリングできる据え置き型端末、さらにはウェアラブル端末へと広がりを見せている。今回の開発はそのような社会ニーズに対して一つのソリューションを与えるものとなった。
今後は更さらなる顧客ニーズにこたえるため、上記のようにいたるところへ組込可能なさらなる小型化、また、ユーザに、より正確な情報を伝える、粉塵濃度出力機能タイプのセンサの展開を進めていきたい。
参考文献
- 1)
- 微小粒子状物質(PM2.5)測定法評価検討会:「大気中の微小粒子状物質(PM2.5)の測定方法について」(2008)
- 2)
- 山田英巳ら:「流れ学 -流体力学と流体機械の基礎」森北出版株式会社(2016)