














定量的な着雪防止機能と車両検知性能を両立したミリ波レーダフードの開発
- ミリ波レーダ
- ミリ波レーダフード
- ITS(高度道路交通システム)
- 着雪検証
- 車両検知
安全で円滑な道路交通の実現に向けて、道路交通インフラとして整備されたセンサから車両情報を取得し、信号制御や車両の自動運転支援に活用する高度道路交通システムが重要となる。この一環として当社では交通監視用ミリ波レーダの展開を行っている。ミリ波レーダは従来のセンサに比べ、広い範囲で車両情報が取得できるが、電波照射面に着雪が発生すると、電波が減衰し検出性能の低下を招く。そこで、降雪地域も含めた日本全国へのミリ波レーダの展開に際し、着雪防止フードの開発を実施した。本報告ではミリ波レーダ用着雪防止フードを設計するにあたって、まず目標とする風雪量の定量化を実施した。また、フード付加により車両検知性能に影響を及ぼさないようなフード構造を電磁界シミュレーションにより決定した。そして、着雪防止と車両検知の両面からの有効性を実験的に確認できたことを示す。
1. まえがき
日本国政府は世界一安全な道路交通の実現を目指し、おおよそ5年周期で交通安全基本計画を策定している。現在は、令和3年度から7年度までの5か年を第11次交通安全基本計画として施策推進が行われている1)。その中での具体的な施策として、高度道路交通システム(Intelligent Transport Systems:以下、ITS)の活用があげられている。ITS活用の目的として、道路交通の安全性、輸送効率および快適性の向上を実現するとともに、渋滞の軽減といった交通流の円滑化が考えられている。その施策としては、詳細な道路交通情報の収集・提供のための車両感知器のインフラ整備を推進し、インフラから提供される情報を補完するため、広範囲なリアルタイムの自動車走行履歴(プローブ)情報なども集約・配信しようとしている。
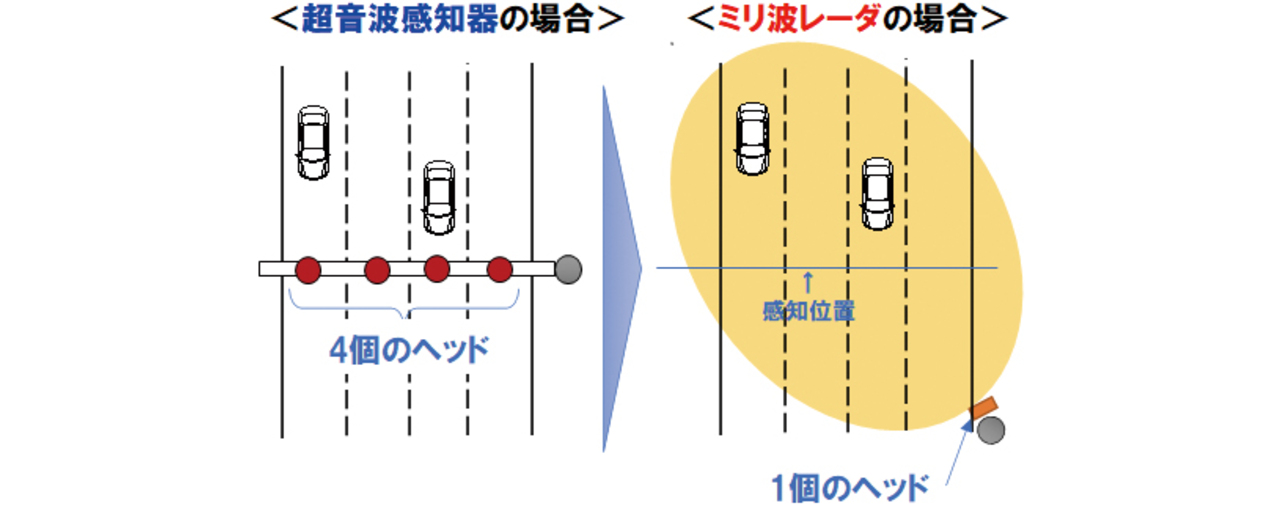
我々はこの施策をもとに、現在の一般道路における交通量の収集に利用されている超音波感知器の代替として、低コストでより広範に車両情報を収集できるミリ波レーダを展開している。車両用感知器の種類は警察庁で定められており2)、現在、日本で最も多く使われている車両感知器は超音波感知器3)である。その超音波感知器に対して、ミリ波レーダはいくつかの利点を有している。図1に示す通り、複数の車線を1台で検知可能であることや路肩設置が可能であり、保守性に優れている。また、超音波感知器のように点での感知ではなく、面で感知が可能であるため、車両の挙動などを把握することができる4)。これは超音波感知器が設置点を通過する車両より挙動を推測するのに対し、ミリ波レーダは設置点以外の部分の挙動も取得可能ということである。そのため、信号待ち車両の発進や車列長の検知などを行うことが可能となる。この特性を活かし、ミリ波レーダと信号制御機を連携させ、適切な信号制御を行うことにより、交通渋滞を緩和させるといった、ITSへの活用5)も期待されている。
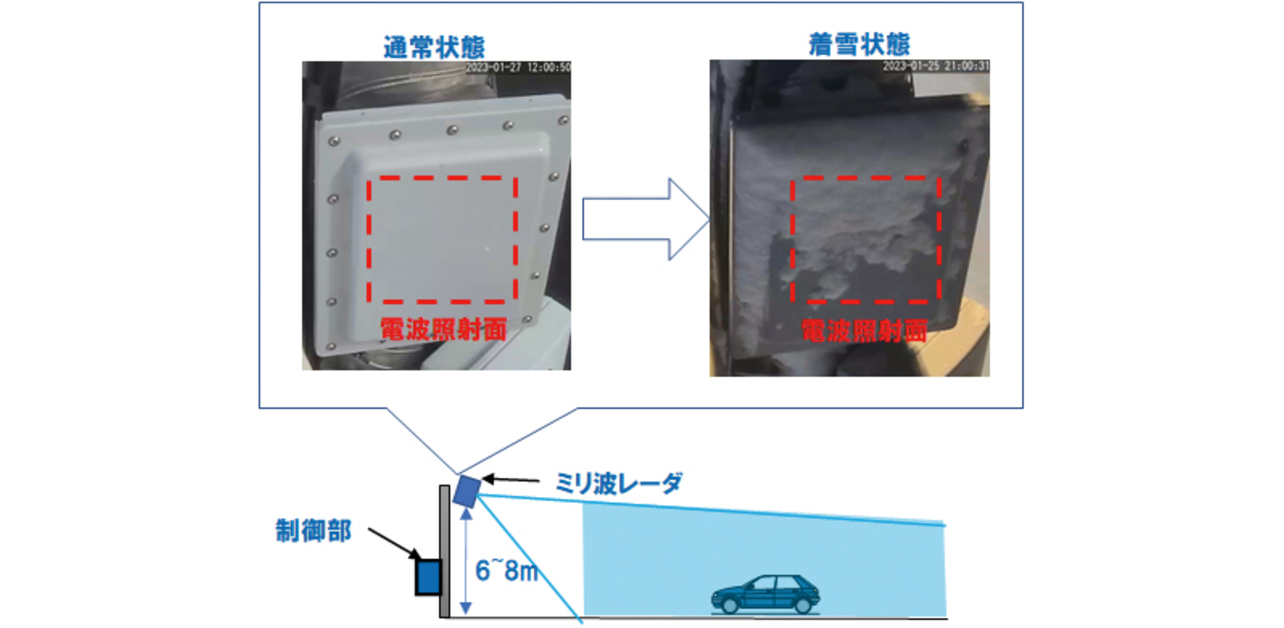
ミリ波レーダは、図2に示すように、高所から道路面に対して電波が照射されるよう設置される。これにより、走行する車両を広い範囲で計測できる。一方で懸念点として、横風を伴う降雪が発生した場合は、雪が電波照射面に直接あたることになり、時間と共に着雪する可能性がある。実際に、着雪が発生すると電波が減衰し、車両検出精度に影響があることが、実験より確認されている。
日本では沖縄を除く全都道府県で降雪があり、2019年度にはそのうちの27都道府県で5日以上の降雪が確認されたとする統計結果6)がある。そのため、日本全域へのミリ波レーダを展開するにあたり、着雪に対する対応が必要と考えた。
着雪を防止するための対応策として最も簡便な方法は、着雪防止コーティングをすることである。しかし、この方法では、長期間にわたって屋外に暴露した場合、コーティングの劣化により着雪防止性能が低下することが考えられる。また、ミリ波レーダにヒータを設置方法もあるが、電波照射面にはヒータを設置できない。そこで我々は物理的に着雪が発生せず、後付けが可能であるフードを検討した。
フード検討に際しては、電波照射面に雪が付着せず、同時に車両検知性能に影響を及ぼさないような電波特性を確保する必要がある。これら両面の性能確保のため、次のプロセスに従って設計を実施した。
- 全国的な風速の統計データから目標とする風雪量を決定し、着雪しないモデルを構築。
- 構築したモデルに対して、電波的な側面からフード無と同等の性能が担保できるかをシミュレーションし、フード形状を決定。
- 目標とする風雪量に対する耐性確認。
- 実道路でのフード有/無のセンサを用いた比較精度検証
2. フード設計モデルの構築
2.1 耐風雪量目標値の決定
センサ用のフードは、そのセンサに合わせて様々な種類が開発されているが、そのフードが持つ防風雪性能に関しては、明示されていないことが大多数である。そこで、ミリ波用着雪防止フードを開発するに当たり、防護すべき耐風雪量として、平均風速と目標値を定めた。
風速の指標分類として、最大風速(10分間平均風速の最大値)、瞬間風速(3秒間の平均風速)、瞬間最大風速(3秒間の最大風速)、平均風速(10分間の平均風速)の4指標がある。それらの内、平均風速の指標を採用した理由として、雪がある程度の厚みを伴ってミリ波レーダに付着するためには、一定時間が必要であること、および、定常的な風雪に耐えることを考慮したためである。
次に、気象庁ホームページより、過去10年間(2013~2023)の降雪期間として定義した1~2月の平均風速のデータを取得し、表1を作成した7)。データの作成において、各都道府県に少なくとも一つ存在する気象台、もしくは主要な観測所を合計136地点選定した。また、表1では90%タイルとしてまとめを行っている。これは第一に、平均風速の中でも異常値となる平均風速を排除するためである。第二に、10年間のデータから、一般的に発生が想定される風雪に対して、着雪防止を図ることを目的としたためである。
| 地方 | 地点数 | 平均風速 (m/s) |
|---|---|---|
| 全体(沖縄除く) | 136 | 5.8 |
| 北海道全域 | 22 | 7.3 |
| ・道北(宗谷、留萌) | 5 | 8.0 |
| ・道東(十勝、釧路、根室) | 7 | 6.7 |
| ・道央(石狩、後志、空知、胆振、日高) | 8 | 6.3 |
| ・道南(渡島、檜山) | 2 | 9.9 |
| 東北地方(青森、秋田、岩手、山形、宮城、福島) | 17 | 6.3 |
| 北陸地方(新潟、石川、富山、福井) | 9 | 6.7 |
| 関東地方(茨城、栃木、群馬、千葉、埼玉、東京、神奈川) | 13 | 5.5 |
| 甲信地方(長野、山梨) | 7 | 4.1 |
| 中部地方(岐阜、静岡、愛知、三重) | 14 | 6.2 |
| 近畿地方(滋賀、京都、大阪、兵庫、奈良、和歌山) | 11 | 5.1 |
| 中国地方(鳥取、島根、岡山、広島、山口) | 14 | 4.9 |
| 四国地方(徳島、香川、愛媛、高知) | 9 | 5.6 |
| 九州地方(福岡、佐賀、長崎、大分、熊本、宮崎、鹿児島) | 20 | 4.7 |
| 沖縄(本島のみ) | 2 | 6.6 |
この結果として、この中の最大である北海道:道南の9.9 m/sの平均風速を充足できるようにフードの防護性能目標値を10 m/sとした。
2.2 雪の飛翔方向の理論モデル
フードが10 m/sの風雪に耐性を有するかは、理論的に雪の落下速度の関係から導き出せると考えた。
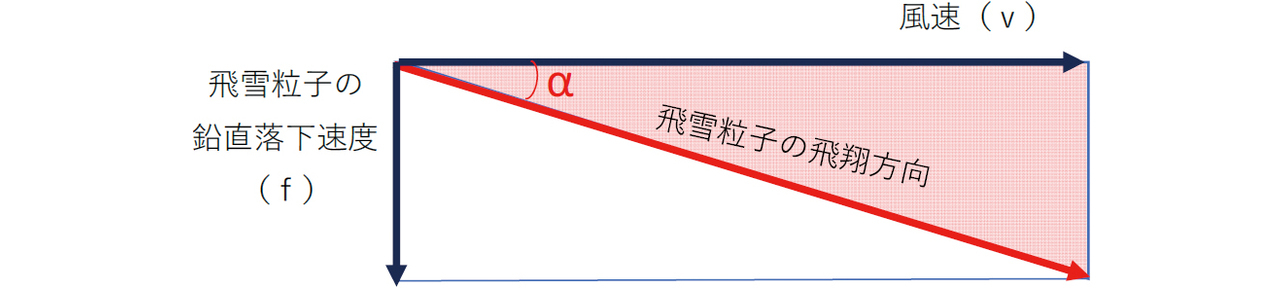
代表的な雪の結晶の落下速度は、0.94 m/sで落下すると報告されている8)。ここに横方向へのベクトルである風の要因を付加し、雪の飛翔方向の単純理論的モデルとして、雪の鉛直落下速度(f)と風速(v)の関係で表した。この時、センサ表面への雪の入射角度は式(1)および図3で表される。例として、簡便化のために落下速度を1 m/sと換算すると10 m/sの風速に対しては5.7°の角度でセンサ表面に入射されることがわかる。なお、単純化のため、このモデルでは、下からの吹上の風に関しては考慮しないこととする。
2.3 フード形状の仮決定
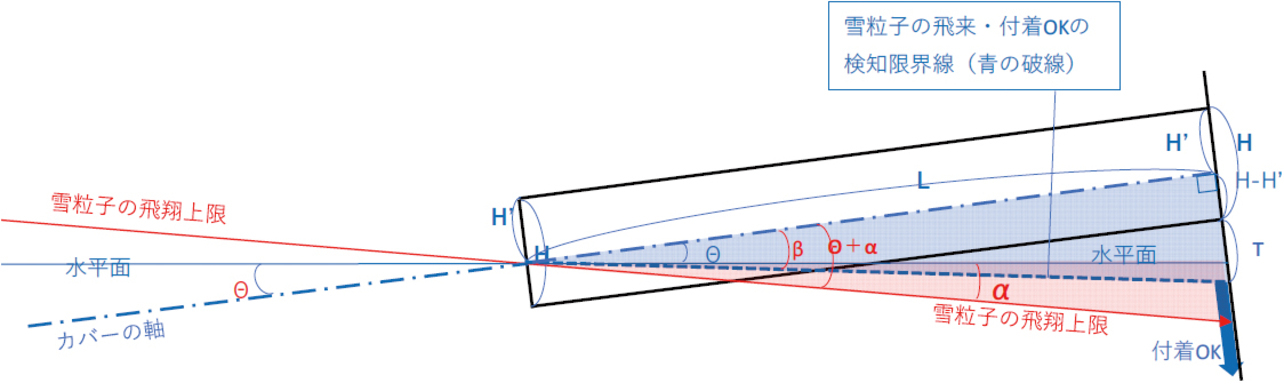
雪の飛翔方向の理論モデルを利用し、フードの検討を実施した。フードをミリ波レーダに適用した場合に、着雪が、ミリ波レーダからの電波照射を阻害しないように、レーダの送受信アンテナを含むプリント基板(以下:レーダアンテナ基板)の範囲には、雪を付着させない構造の検討が必要である。そのモデルを図4に示す。このとき、レーダアンテナ基板の下端に雪が付着する検知限界角βは以下のパラメータと式(2)で表される。これに式(1)とミリ波レーダの俯角Θを加味した場合、理論式として式(3)が成り立つ。これは、理論式(3)を満足する場合、レーダアンテナ基板の下端より上には着雪発生しないこと、すなわち電波の送受信に問題が発生しないことを表している。
これらのパラメータを元として、図5のようにフードの仮形状を設計した。
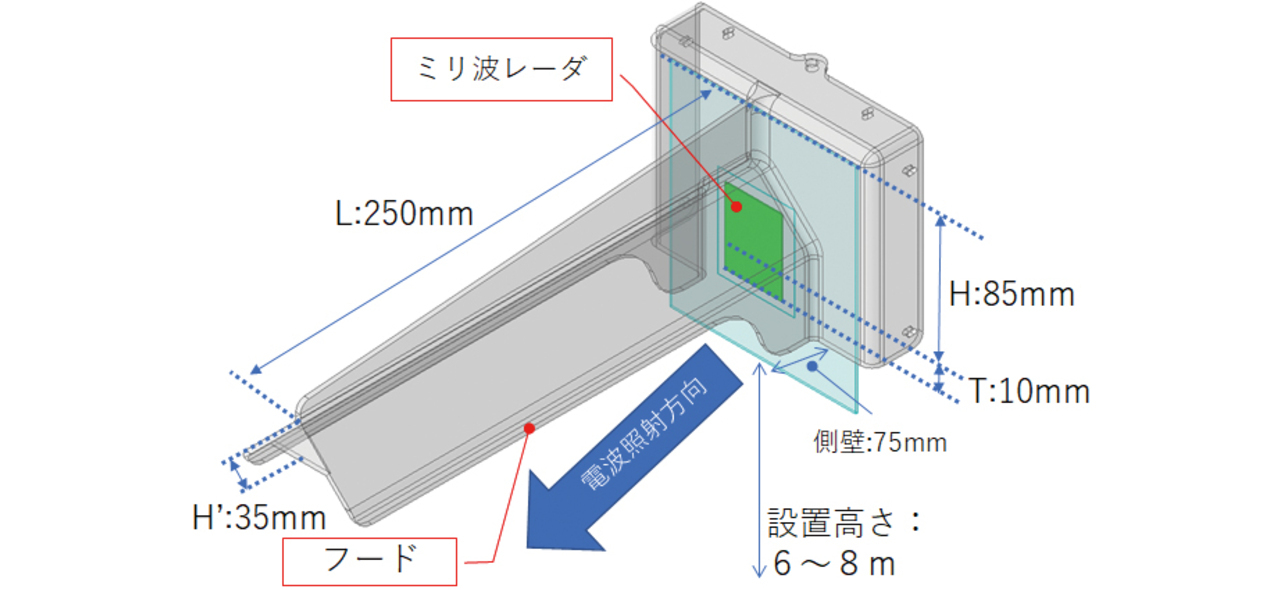
なお、フードの素材としては電波の透過性やシミュレーションでの外乱要因をなくすことを考慮し、特性が既知である電波照射面カバー(以下:レドーム)と同様の素材であるポリカーボネートを採用した。
- H:フードの高さ(mm)
- H′:前垂の長さ(mm)
- L:フードの長さ(mm)
- T:レーダアンテナ基板下面までの長さ(mm)
- Θ:ミリ波レーダの俯角(°)
3. フード形状の詳細設計
前章で仮決定したフード形状はミリ波レーダへの着雪の観点のみで設計されており、ミリ波レーダから送受信される電波への影響は考慮されていない。フードの付加によって電波特性が大きく変化すると、車両検知性能に影響を与えるおそれがある。そこで、フード形状が電波特性に与える影響をシミュレーションによって評価し、影響を低減するように設計を行うこととした。
3.1 シミュレーション条件
フード形状がミリ波レーダの電波特性に与える影響について、電磁界シミュレータAnsys HFSSを用いて解析した。図6(a)に、フード付加前のミリ波レーダ単体としての解析モデルを示す。なお、解析モデルは、計算負荷を低減するため、レーダから送受信される電波特性への寄与度が大きい、以下の2つのみで構成している。
- レーダアンテナ基板
- レドームの一部
そして、図6(b)はフードを付加した解析モデルである。
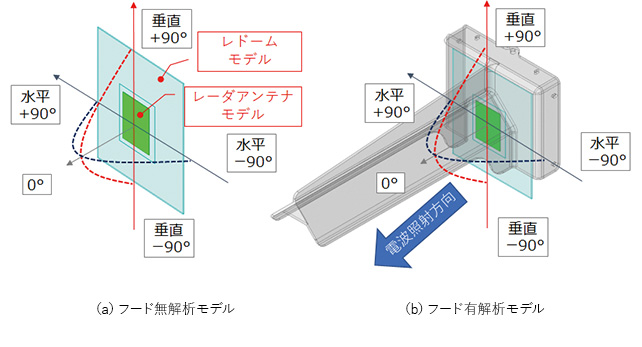
これらフード付加前後のモデルについて解析を行い、水平面と垂直面におけるアンテナ放射パターンを比較評価した。アンテナ放射パターンにおける利得が低下すると、ミリ波レーダとしての車両検知距離が低下する。また、利得が最大値の半分となる放射パターンの角度幅をビーム幅と呼び、ビーム幅が狭くなると車両検知角度範囲も狭くなり、検知可能な車線数の減少につながる。したがって、フード付加による放射パターンの変化が小さければ、車両検知性能への影響も小さくなる。
3.2 シミュレーション結果
ミリ波レーダの設置形態と検知対象である車両の位置関係を考慮すると、ミリ波レーダから見て検知対象の車両は、図6の解析モデルにおける垂直角度がゼロ度以下の範囲にしか存在しない。フードは垂直角度が負の範囲に大きく開放された形状であり、シミュレーションにおいても垂直面の該当範囲で利得とビーム幅に明確な変化が見られなかった。そのため、垂直方向への影響するフード長Lとしては250 mm固定として検討から除外し、今回は水平面の放射パターンを評価対象とした。
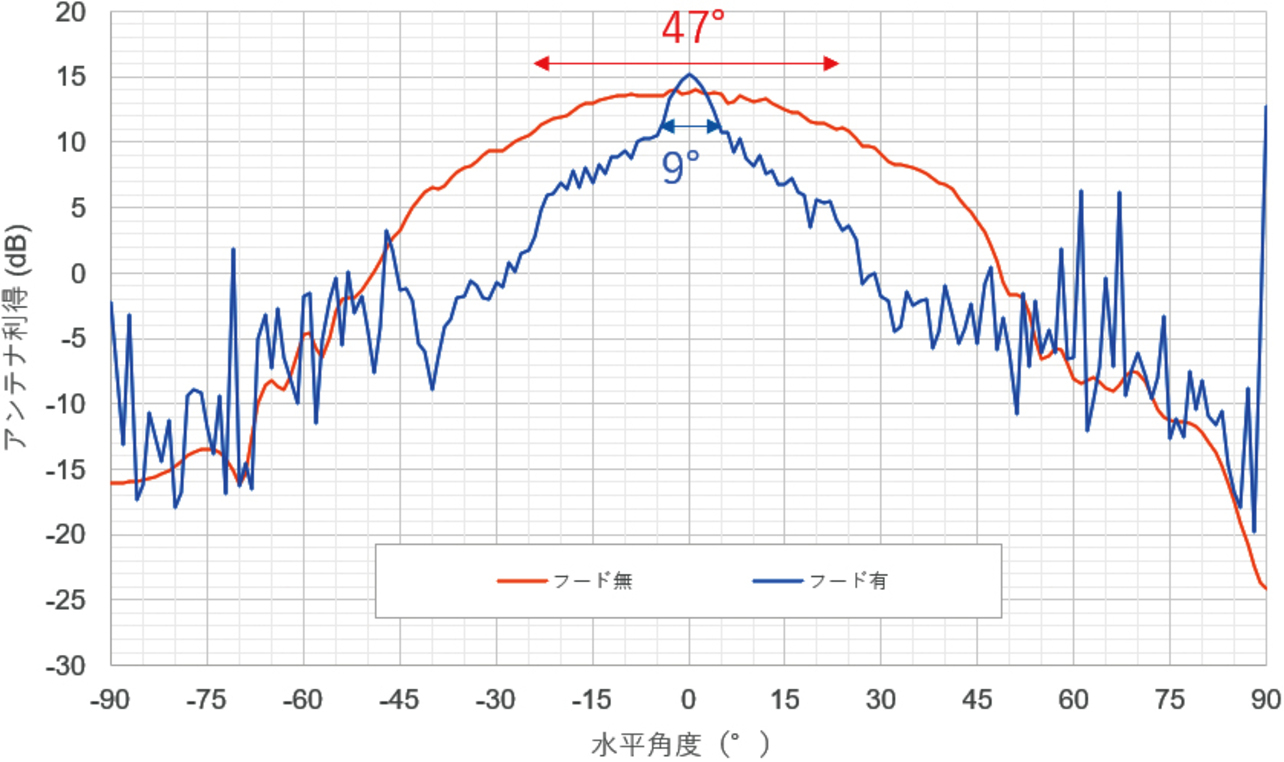
ミリ波レーダの使用周波数である、76 GHzにおける水平面放射パターンのシミュレーション結果を図7に示す。フードを付加することで、水平角度がフード無に比べて47°から9°へと約1/5になっている。また、放射パターンに細かい振動成分が重畳しているが、これは電波がフードで多重反射することにより発生したリップルと呼ばれるものである。これらの変化は、車両検知距離の低下や車両検知可能な車線数の減少につながる。
3.3 フードの改善
3.2で示したフードの影響を低減するためには、その原因の特定が重要となる。これはフードのいずれかの部位が電波の指向性を阻害しているためである。そのため、その部位を特定し、指向性を阻害しないような形状へ改善を検討した。ここで、水平面の放射パターンに影響を与える主要因は、水平面と直交するように存在するフード側壁部分の形状にあると考えた。フード側壁からの風雪に対しての防護性能も必要であることから、側壁部分そのものは残しつつ、放射パターンへの影響が小さくなるように側壁の長さを調整することを検討した。検討方法としては図8(a)に示すようにフード側面の部分をレドーム表面から40 mm/50 mm/60 mm/70 mmと異なる長さに設定したモデルを用意した。そして、長さを変更した場合の水平面放射パターンへの影響を比較した。
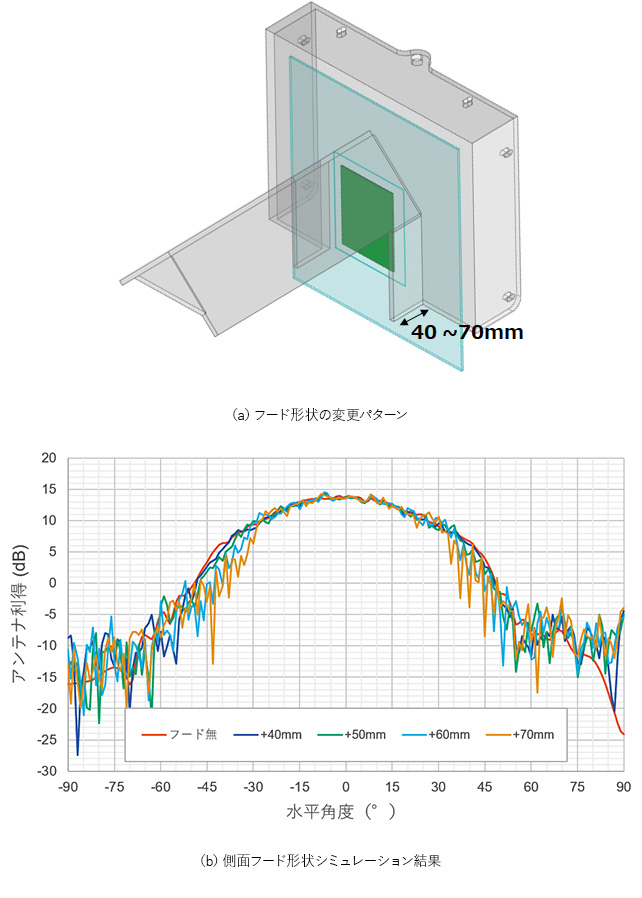
結果を図8(b)に示す。この結果より側壁の長さが50 mm以上になると明確にビーム幅への影響が強くなり、リップルも増大することがわかったため、側壁の長さは40 mmに決定した。
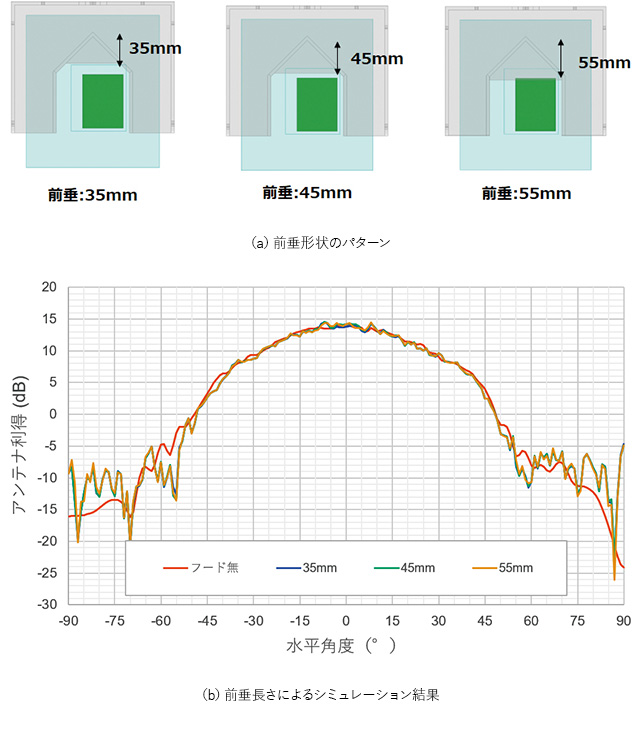
また、フードの前垂部分に関してもできるだけレーダアンテ基板を覆い隠せる構造が着雪防止機構としては望ましいため、長さを図9(a)に示すように35 mm/45 mm/55 mmと変更し、シミュレーションを実施した。その結果を図9(b)に示す。この結果からは前垂はどの長さでも大きく放射パターンに影響しないことが分かったため、長さは最終的な着雪実験により決定することとした。
4. 着雪実験
前章での電磁界シミュレーションで、電波の指向性に影響を与えないフード形状の決定を実施した。本章では形状の決定したフードを用いて、レーダアンテナ部に着雪が発生するかの着雪実験を実施した。
4.1 実験条件
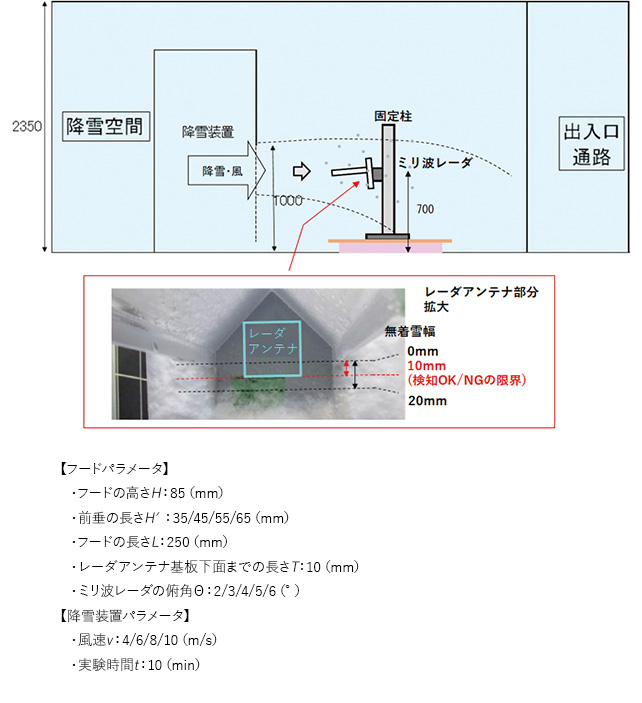
着雪実験に関する実験条件を図10に示す。風速10 m/sまでを再現できる降雪装置を用いてフードを付加したミリ波レーダを図の中央の固定柱に設置し、雪の吹付を行った。フードの実験条件としては図中条件の通り、H′およびΘを変化させた。また、降雪装置により風速vを変化させつつ、雪の吹き付けを実施し、一定の実験時間経過後のミリ波レーダのレーダアンテナ基板範囲に付着する雪の有無を合格の判断基準とした。なお、実験のパラメータは全網羅的に実施するのではなく、風速10 m/sを合格できるパラメータを探索しつつ、実験を行った。また雪質は最もミリ波レーダに付着しやすい湿雪として実験を実施
した。
4.2 実験結果
着雪実験の結果を図11に示す。図での横軸βは理論式(2)の通り、ミリ波レーダにフードを付加し、水平に置いた状態でレーダアンテナ基板下端に入射される角度を決定している。本実験では前垂の長さを変更することにより、角度βを可変とした。また、縦軸Θ+αは雪の進入角度αにミリ波レーダの俯角を加味した場合の角度であり、風速および俯角を変更することにより角度を可変とした。そしてそれらのパラメータを変更して決定された縦軸、横軸の角度に対して実験結果をOK、OK(限界)及びNGの点でプロットした。OKとなっている点は、図10で示されるレーダアンテナ基板下端より上部に着雪が認められなかった実験条件である。OK(限界)とした点は、レーダアンテナ基板下端から10 mmのラインより上部に着雪が認められなかった実験条件である。10 mmと定義した理由は、レーダアンテナ基板の下端から送受信に関連するアンテナ素子部分まで10 mmのクリアランスがあるためであり、電波特性に影響を与えない限界のラインとして定義したためである。そして、OK(限界)以上に着雪が発生した実験条件はNGとした。
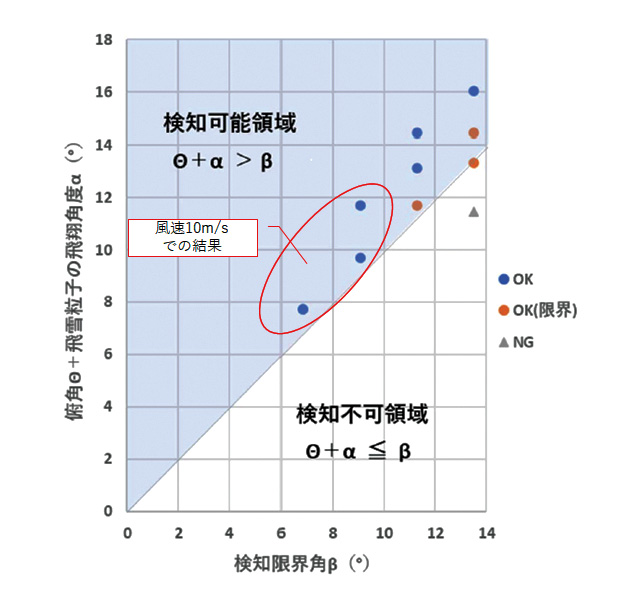
それらをプロットした図に対して理論式(3)に基づき検知可能領域と検知不可領域に区分した。この区分は、理論的に下記のよう定義される。これは理論式(3)で与えられたパラメータが正しいとすると次のようになることが予想される。
- 検知可能領域:レーダアンテナ基板下端への着雪を予想した領域
- 検知不可領域:レーダアンテナ基板下端以上への着雪を予想した領域
その結果、NGの点は検知不可能領域に位置することが確認され、OK(限界)がほぼ境界に位置することが分かった。それにより、実験と理論値は近しい関係となることがわかった。なお、図中での赤枠でのプロットは風速10 m/sで実験した結果であり、レーダアンテナ基板以下の着雪となり、OKと判定された。それにより、本フードでの着雪防止性能は満足することがわかった。
5. 実フィールドでの検証
前章までの実験で電波として指向性を阻害せず、かつ目標値である10 m/s風雪に対して耐性のあるフードが完成した。ここでは最終的な確認として、実フィールドを用いた車両検知実験を実施した。
5.1 実験条件
実験として、図12に示す通り、道路上で実際に車両の検知を行い、フードを付加した状態でも検知に影響がないかの実験を行った。実験方法は、時刻同期されたミリ波レーダ(フード無/有)および車両の真値台数計測用カメラを作動させ、フード無のミリ波レーダとフード有のミリ波レーダで検知した検知台数と比較することとした。

また、その他の実験条件としては以下の通りである。
- ミリ波レーダ設置高さ:5.85 m
- 実験車線数:4 車線
- 車両検知方向:遠ざかる方向(後方検知)
- 車両検出位置:センサから60 m 地点
5.2 実験結果
フード無でのミリ波レーダとフード有でのミリ波レーダの車両検知台数および車両検知精度の結果を表2に示す。
| カメラによる真値台数 | 検知台数 | 検知精度 | |
|---|---|---|---|
| フード無 ミリ波レーダ |
644台 | 661台 | 97.4% |
| フード有 ミリ波レーダ |
645台 | 99.8% | |
なお、表2での検知精度は式(4)を用いて算出した。結果は、フード有のミリ波レーダのほうが、フード無のミリ波レーダよりも2.4ポイント高い検知精度を示す結果となった。この結果より両条件で精度に違いはあるが精度目標は達成できていることを確認した。
今回、フード有のミリ波レーダがフード無のミリ波レーダを上回る検知精度を達成している要因について、次のような可能性が考えられる。一つは、フードにより車線外などからのマルチパスによりミリ波レーダに戻ってくる不要な電波をカットできた可能性である。なお、今回のフードを設計する上では、送信アンテナについて放射パターンをシミュレーション評価したが、受信アンテナの評価は行っていない。
もう一つは、フード有無のミリ波レーダの設置位置の関係で、対象物への電波の照射および反射波の受信状況が異なるため、若干の誤差が発生した可能性がある。
上記の要因考察も含めた結論として、フードを付加したミリ波レーダはフード無と同等の精度を達成できると判断した。
6. むすび
本報告ではミリ波レーダへの課題として存在したレーダ表面への着雪に対して、防護するための方法として次のようなことを検討、決定した。第一に全国の風雪量のデータをまとめ、防護すべき風雪の目標値を10 m/sとして定めることができた。次にフードの開発に際しては、フード自身がミリ波レーダの電波を阻害しないように、影響の無いフード形状を電波シミュレーションにより決定することができた。また、決定したフード形状に対して着雪実験を実施することにより、目標値とする10 m/sの風雪に対してもレーダアンテナ基板の範囲に着雪が起きないことを実証することができた。そして、最終的に実道で実車両を用いた検証を実施し、フードをミリ波レーダに付加したとしても、フードが無い状態と比較して、変わらない検知精度を有することが確認できた。
以上より、定量的な風雪に対する着雪防止機構を備え、同時に車両検知に影響のない電波照射範囲を具備するフードの開発を達成することができた。
また、副次的には本フードの開発を手戻りなく検証することができた。その要因としては、着雪の理論構築と電磁界シミュレーションで詳細形状を決定した上で実験に臨んだことにより、実験結果からのフィードバックにより改善を行っていく従来のカット&トライのプロセスを省略することができたことがあげられる。
今後は、本フードを用いることにより従来では設置が難しいと考えられている降雪地帯に関してもミリ波レーダを展開していく予定である。
参考文献
- 1)
- 中央交通安全対策会議. “第11次交通安全基本計画.” 内閣府. https://www8.cao.go.jp/koutu/kihon/keikaku11/index.html(Accessed: May. 17, 2024).
- 2)
- 車両用感知器仕様書, 警交仕規第1017号「版2」, 2019-03-13.
- 3)
- 警察庁交通局 監修, 警察によるITS, 財団法人 日本交通管理技術協会/都市交通問題調査会, 1998, pp. 44-45.
- 4)
- 谷本雄大 他, “高角度分離分解能を有する到来方向推定を導入した交通監視用ミリ波レーダ,” OMRON TECHNICS, vol. 52, no. 1, pp. 41-46, 2020.
- 5)
- 藤森立 他, “ばねモデルを用いた交通信号機スプリット制御法,” 研究報告数理モデル化と問題解決(MPS), 2021-MPS-136, no. 2, pp. 1-6, 2021.
- 6)
- 総務省統計局. “統計でみる都道府県のすがた2021(B 自然環境).” e-Stat. https://www.e-stat.go.jp/stat-search/file-download?statInfId=000032055319&fileKind=0(Accessed: Jun. 13, 2024).
- 7)
- 国土交通省 気象庁. “過去の気象データ・ダウンロード.” 国土交通省 気象庁. https://www.data.jma.go.jp/risk/obsdl/index.php(Accessed: Jul. 17, 2023).
- 8)
- 孫野長治, “雪の結晶の落下速度,” 雪氷, vol. 15, no. 6, pp. 1-4, 1954.