














製品規模のシミュレーションと動的な探索を用いた電気的外乱の範囲推定手法の構築
- システムシミュレーション
- 因果モデル
- CAE活用技術
- 適応型実験計画法
- 範囲推定手法
製品には、様々な使用環境の変動に対して安定して動作するロバストな品質が要求される。電気製品では、急激な電圧・電流の変動などの電気的外乱に対して、動作が不安定になる条件を潰しこむ必要がある。様々な外乱に対する動作の検証にはシミュレーション技術の活用が有効であるが、従来の回路シミュレーションでは製品の制御動作に起因する解析規模の増大が問題となり、製品レベルの規模での電気的な動作の解析が難しい。そのため、従来は電気的外乱に対する評価は実機中心であり、不安定な動作を招く外乱条件の見落としによって設計の後戻りが発生するリスクがあった。
本検討では、製品規模の電気的挙動を解析可能なシステムシミュレーション技術と動的な探索手法によって、広範囲の条件から製品の挙動を不安定にする外乱の条件を効率的に推定する手法を構築し、実機検証によって有効性を確認できた。本技術の活用によって、製品開発での限られた検証期間においても、不安定な挙動を招く外乱条件を設計段階で発見し対処できる効果が期待できる。
1. まえがき
近年は市場環境が多様化し、製品がさらされる環境も多様化している。そのような状況の中で、製品には、様々な環境変動に起因する外乱に対して安定して動作するロバストな品質が要求される。電気製品では、急激な電圧・電流の変動などの電気的外乱が製品の不安定な動作を引き起こすため、この外乱への対策設計が求められる。
外乱への対策として、開発では論理的な検証や経験による設計を実施し、実機検証に依存した評価によって品質確認を実施する。評価においては、過去の評価結果やベテラン設計者の知見を基にして製品が不安定となる外乱条件のあたりをつけ、この条件下で実機へ電気的外乱を加えて挙動を確認しているのが現状である。
しかし、これでは以下の問題が発生する。
- 設計者が想定した最悪条件が正しいことを机上で検証できず、不安定な挙動の見落としが発生する。
- 過去機種とは異なる製品のため、不安定となる外乱条件やその範囲が変わり、不安定な挙動の見落としが発生する。
- 不安定な挙動への対処は実機でのカット&トライが中心であるため、対処した条件以外の問題点が悪化したことに気づかず、不安定な挙動の見落としが発生する。
このような状況から、限られた検証期間で、設計で想定しきれない挙動や外乱に対して不安定な条件を的確に発見し対処することが課題となっている。
上記の課題を解決するためには、製品レベルの規模での広い範囲の回路挙動を確認可能な、実機に頼らない検証手段が必要である。
本稿は、システムシミュレーション技術と、動的な条件探索手法を組み合わせた、不安定な挙動となる外乱条件範囲を的確に発見する活用技術について報告する。2章で回路シミュレーションの課題と条件範囲推定の課題、および課題を解決する手法について述べる。3章で構築した製品規模の電気的挙動を再現するシステムシミュレーションについて、4章でシミュレーション結果から製品動作に影響のある外乱の範囲を推定する分析手法について記述する。そして5章で結果を、6章でまとめと今後の展望について述べる。
2. 製品規模で外乱条件を効率的に探索する手法の提案
2.1 現状
机上検証の従来手法である、電気的な挙動を確認するための回路シミュレーション技術と、シミュレーション活用における条件探索の現状について述べる。
2.1.1 回路シミュレーションの現状
電気的な挙動を机上で再現するための技術として、回路シミュレーションがある。本稿では、回路シミュレーションとは、電気回路の設計および解析を効率的に行うためのツールや解析手法の総称を示す。代表的な回路シミュレーションにはSPICE(Simulation Program with Integrated Circuit Emphasis)がある。
回路シミュレーションでは、電気部品の特性と部品間の結線からなる電気回路モデルを回路図に基づいて構築する。そして、検証目的に応じた解析エンジンを使用して、モデルから電気波形を得る。電気的外乱に対する挙動を検証するためには、過渡解析(Transient解析)を用いて時間経過に対する回路内の各部の波形を得るのが一般的である。
2.1.2 条件範囲推定の現状
シミュレーション活用において、パラメータの範囲を一度に探索することは一般的である。主に“静的な”探索手法が用いられ、しらみつぶし(グリッドサーチ)、統計的な条件間引き(実験計画法)によるパラメータの探索などがある。1回あたりの解析時間×探索数が範囲探索の総時間となるため、総時間と得られる範囲の解像度のトレードオフを加味しながら探索数を設定することが活用の上で重要になる。
2.2 課題
2.1節で述べた現状に対して、製品規模で外乱条件範囲を探索することの課題を説明する。
2.2.1 製品規模の回路シミュレーションの課題
現状の回路シミュレーションでは、製品全体での外乱に対する挙動を解析することは現実的ではない。製品の回路全体の解析を対象とした場合、大量の電気部品やデバイスのモデルを扱う必要がある。部品点数が多いほど電気回路モデルの規模が大きくなり、解析時間は増大する。加えて、大量の電気部品を結線することで解析の収束性が悪化し、回路挙動を解析できなくなるケースも存在する。特に、制御回路のようなフィードバック回路(クローズドループ)を含むモデルの場合、非線形な電気特性をもつ複雑なデバイスが多数使用されるため、収束性は格段に悪くなる。このため、製品の回路全体を解析することは現実的ではなく、一部の回路ブロックのみを解析の対象とした、部分的な特性検証としての活用にとどまることが多い。
2.2.2 条件範囲推定の課題
前項の課題を解決し、製品レベルの規模の回路シミュレーションが実行可能になったとしても、不安定な挙動を引き起こす外乱範囲を探索することは難しい。製品レベルの大規模なモデルに対して対象となる条件を探索するには、製品動作や外乱の条件を漏れなく組み合わせて挙動を解析する必要がある。この結果、解析条件としてのパラメータが増えるにつれて解析時間が指数関数的に増大し、設計の上流の限られた検証期間では活用できない。
よって、製品レベルの規模の挙動の解析結果から動作に影響を与える外乱範囲を特定するためには、広い探索範囲から効率的に不安定な条件を見つける活用方法の構築が課題である。
2.3 課題解決の方針
2.2.1項の課題を解決するために、従来の回路シミュレーションに因果モデルを追加することで計算規模が増大しないようにし、製品レベルの規模の動作を解析できるシステムシミュレーション技術を構築した。
また、2.2.2項の課題を解決するために、探索条件を動的に変更しながら不安定な挙動を示す条件範囲を重点的に探索する手法を導入した。
併せて、システムシミュレーション技術と動的な条件探索手法を連動させて、製品動作が不安定となる外乱範囲の推定を実現した。
2.3.1 因果モデルの追加
製品全体での挙動の解析を可能にするために、因果モデルを付加する方針とした。
従来の回路シミュレーションにおける電気回路モデルは、非因果モデルと呼ばれる物理的なモデル要素ですべてを記述する方式である。表1に示すように、電気回路では、抵抗、コンデンサ、電源などがモデル要素に該当する。非因果モデルは物理的平衡則(例.キルヒホッフの法則)を満たすようなモデルのため、電気回路と親和性がよい。
| 観点 | 非因果モデル |
|---|---|
| 考え方 | 要素間は等式で表され、モデル全体を方程式として解析する |
| 接続方法の例 | 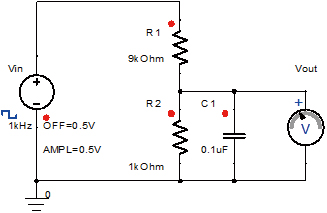 |
| モデル要素 | 抵抗、コイル、コンデンサ、電源など |
| 特徴 | 物理方程式を直接表現できるため、電気回路モデルとの親和性がよい |
| 利点 | 物理的平衡則を満足するため、物理構造をモデル化することで電気的挙動を精度よく解析できる |
しかし、フィードバック回路等の制御回路を扱う際には、制御回路を構成するデバイスの機能を非因果モデルで構築すると膨大な要素数になる。そのため、表2に示すような、制御回路のデバイスで規定される入出力間の信号の関係性や演算の順序を簡潔に表現でき1)、収束がよく反復計算に時間がかからない因果モデルが適している。
ただし、因果モデルは、モデル要素ごとに必要な詳細度を見極め、回路シミュレーションで表現する複雑な等価回路の機能を、数式やデータテーブル、状態遷移等を用いた変換を行う。これらを組み合わせて、少ない要素数で複雑な機能を表現する因果モデルを複数使用することで、製品レベルでのモデル規模と電気的挙動を表現可能な精度を両立するモデルを実現する。
| 観点 | 因果モデル |
|---|---|
| 考え方 | 要素同士は入力と出力の関係になり、要素間での逐次代入によって解析する |
| 接続方法の例 | 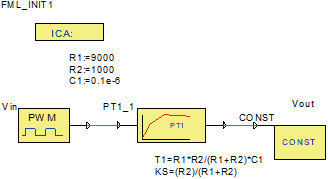 |
| モデル要素 | ゲイン、加算器、伝達関数など |
| 特徴 | 計算順序を明示できるため、制御モデルやプログラムとの親和性がよい |
| 利点 | 非因果モデルに比べて収束性がよいため、反復計算に時間がかからない |
よって、製品の主機能を実現するために必要な回路部分は従来の回路モデル(非因果)を使い、製品の制御回路を構成する部分に因果モデルを用いるのが最適であるため、この構成を実装した。本稿では、回路モデルと因果モデルを組み合わせたモデルをシステムモデルと呼び、製品全体での電気的挙動の解析を可能にする。具体的なモデル構築結果は、3章で示す。
2.3.2 不安定条件の動的な探索
広い探索範囲から効率的に不安定条件を探索するために、動的な探索手法を導入する方針とした。動的な探索とは、条件を探索する過程で得られた情報を利用して、次の条件を逐次決定しながら探索を進める手法である。
比較のため、2.1.2項で挙げた“静的な”探索手法について述べる。静的な探索では、解析前に条件を一括で指定し、指定した条件をそれぞれ解析する。探索する条件をあらかじめ計画するため、実行が容易である。図1に2つの条件から故障範囲を探索する例を示す。左の図は各条件を一定間隔で網羅的に探索する最も単純な探索手法(しらみつぶし)、右の図は少ない条件で広範囲を探索する実験計画法(統計的な条件の間引き)を用いた探索点を可視化したものである。
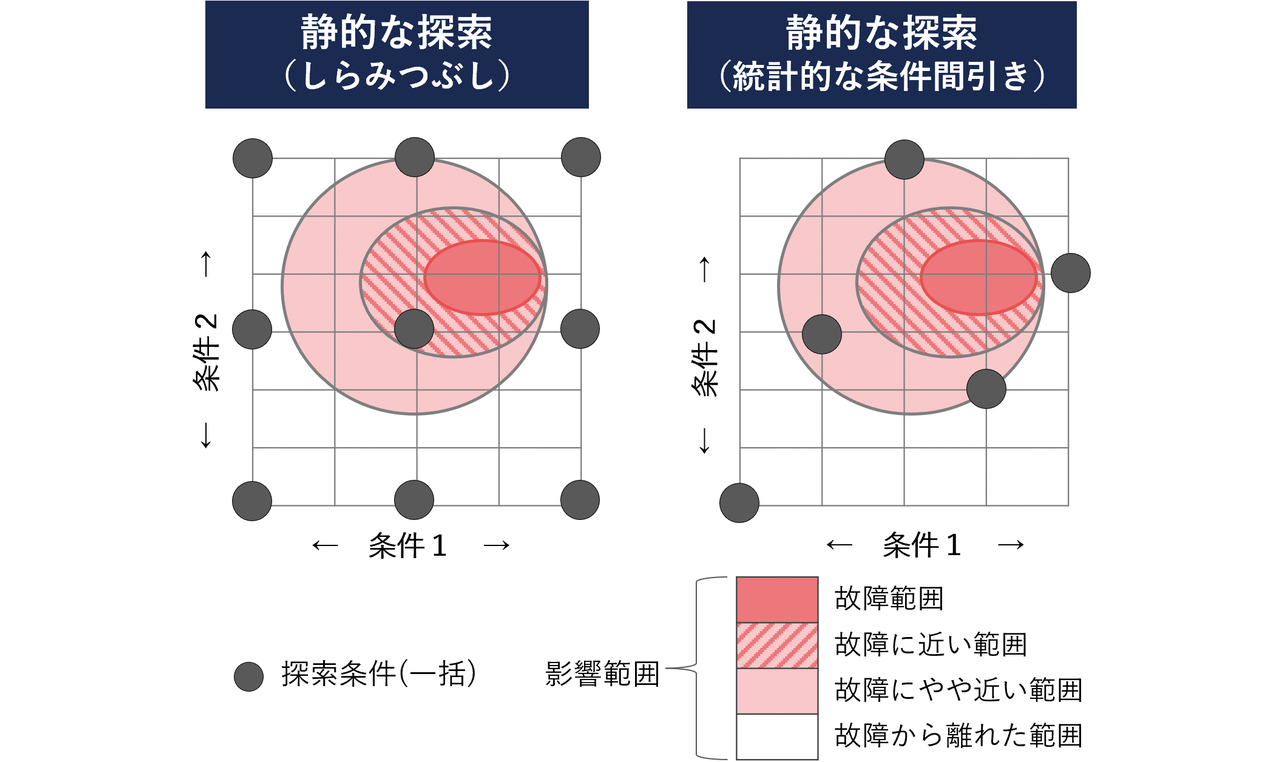
しかし、いずれの場合も、図中の「故障範囲」に示すようにあらかじめ計画した探索点の間で故障条件がある場合は、故障の見落としが発生してしまう。
これに対して、条件を逐次決定しながら探索を進める動的な探索手法を、図2を用いて説明する。まず、広い範囲から抽出した探索点を探索し(点1)、このうち故障範囲に近くなる点を発見する。つぎに、発見した点を中心として再度探索点を設定し(点2)、同様に探索する。さらに、このうち故障範囲に近くなる点を中心に探索点を設定し(点3)、探索する。このように動的に条件を変えながら探索することで、不安定となる条件を的確かつ効率的に発見する。
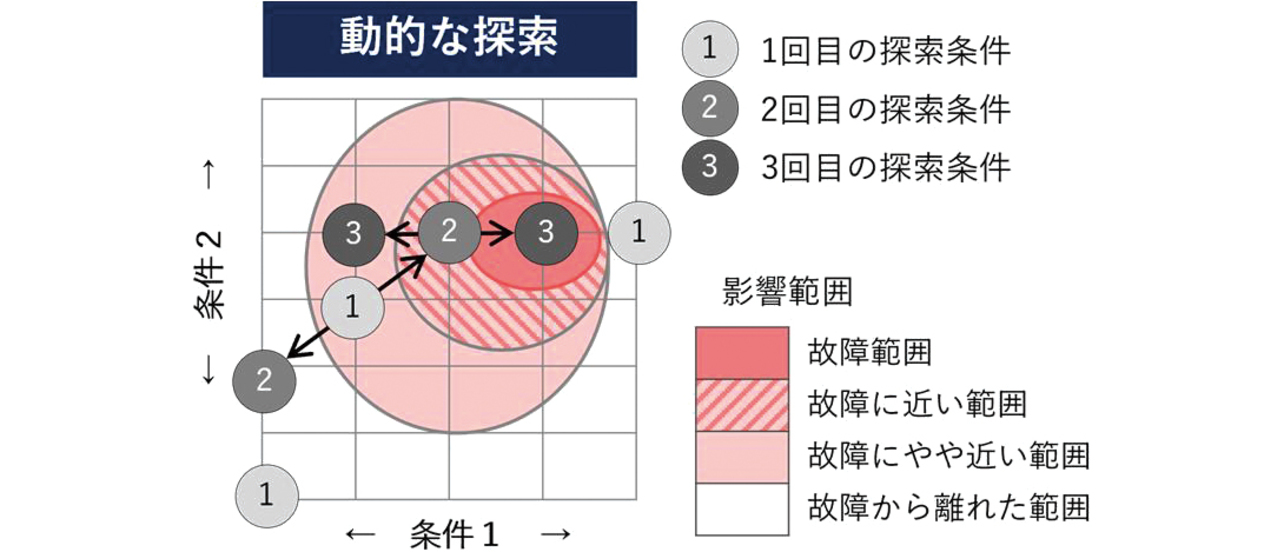
動的な探索によって外乱の条件範囲を具体的に分析した結果は、4章で示す。
3. 製品規模の電気的挙動を再現するシステムシミュレーション技術
3.1 実現したモデル構成
製品レベルの規模での動作解析を可能にするシステムモデルの構成を述べる。製品内の電力を扱う回路や電源系に関わる回路部分を、電気回路としての非因果モデルで表現する。これに対して、製品の制御回路を構成する部分と電気的外乱を生成する製品外の部分を因果モデルで表す。これらを統合したモデルで全体の過渡解析を行う。以下の図3に、スイッチング電源を例としたモデル構成を示す。
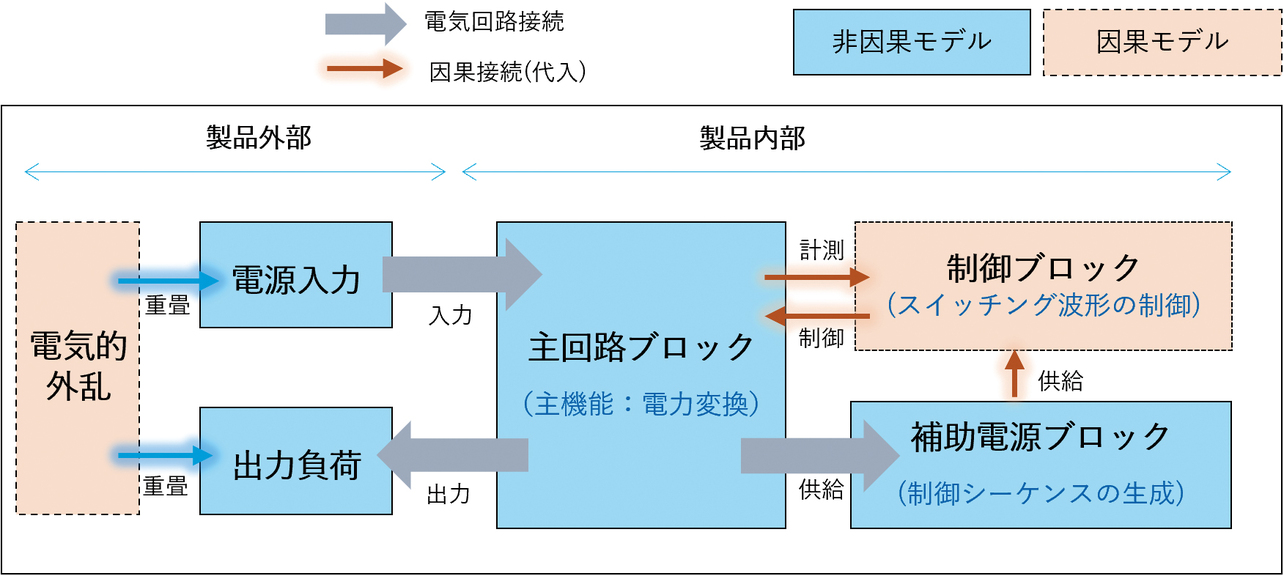
本技術においては、非因果モデルと因果モデルの使い分けを定義した。非因果モデルで表現することを基本とし、以下の3つの基準のいずれかに該当する場合は因果モデルを用いた。
- 電圧、電流のどちらか一方が信号として用いられ、電圧と電流の関係性を考慮しない回路。たとえば、電圧伝送方式のアナログ回路や、MPU・メモリ等の論理的な動作のためのデジタル回路が該当する。
- 入力に応じて出力が変化し、その関係性が数式またはデータテーブルで表現できる回路。入出力間の伝達関数を定式化できるオペアンプ応用回路や、入出力間の関係性のデータテーブルが明確に定義されているフォトカプラなどが該当する。
- 特性の時間変動パターンを制御する場合。たとえば、JISC 61000-4-112)で規定される電圧ディップ/電断のような電気的外乱のシーケンスが該当する。
上記の構成と基準で構築したモデルに対し、因果モデルと非因果モデルを同一モデル上に表現できる解析ツールを用いて過渡解析を行うことで、製品全体での挙動の解析を可能にした。以降、本解析をシステムシミュレーションと呼ぶ。以降で述べる解析事例では、ANSYS社のAnsys Twin Builder 2023R1を解析ツールとして用いた。
3.2 製品規模での挙動を解析する具体的なモデル
本技術によって構築したスイッチング電源のシステムモデルを図4に示す。スイッチング電源の基本構成である各回路3)を、3.1節で定義した使い分けに応じて非因果または因果でモデル化した。
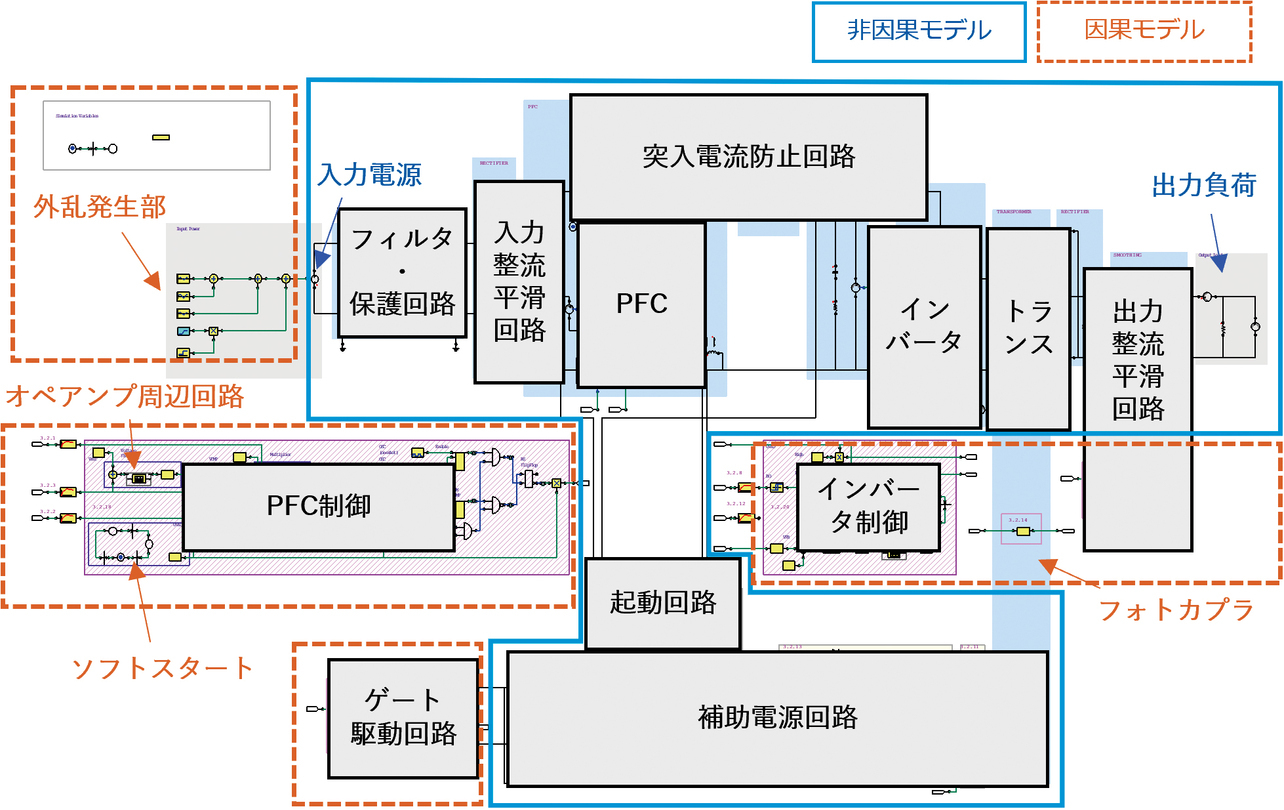
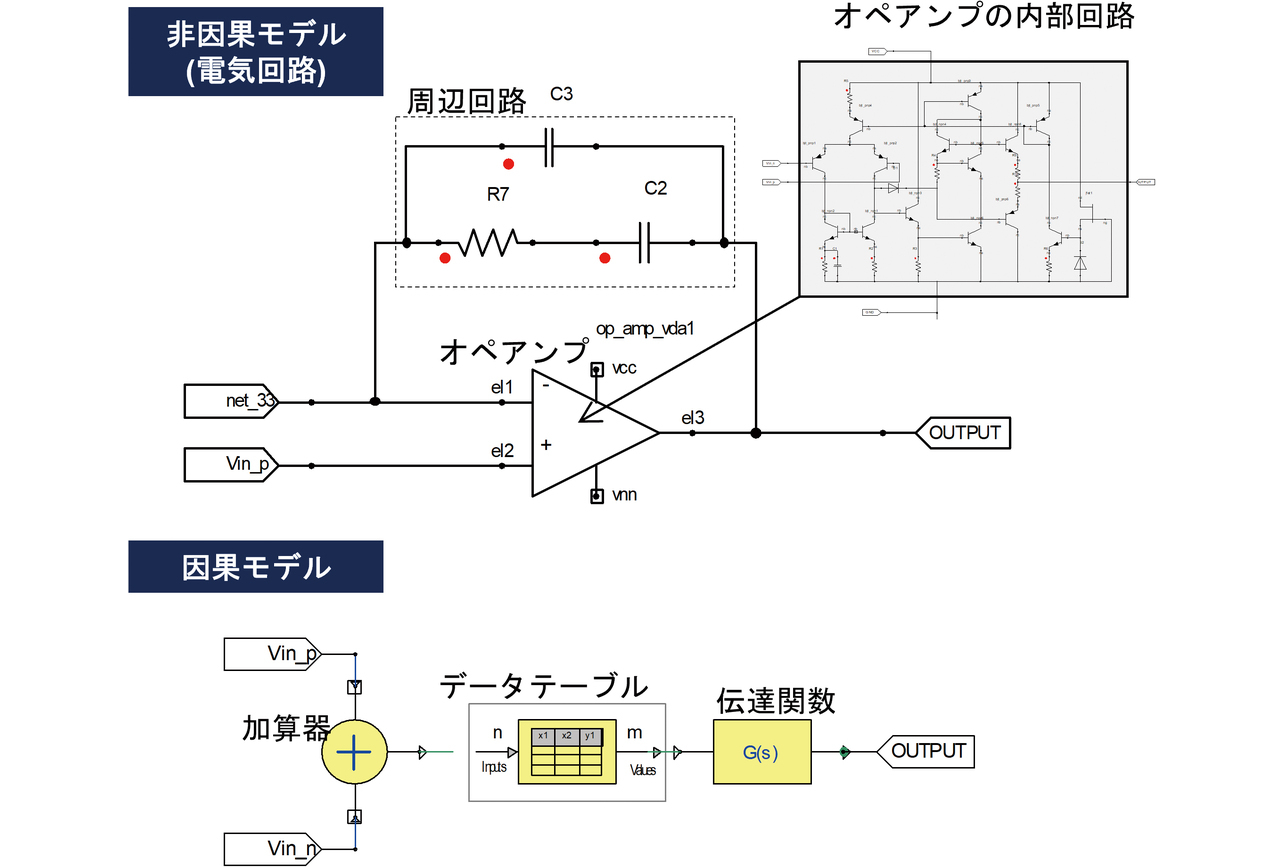
因果モデルを使用することでモデル規模を低減させることができた。たとえば図5に示すように、オペアンプとその周辺回路を電気回路モデルで表すと数10点のモデル要素が必要になるが4)、因果モデルで表すことで加算器、非線形ゲインを表すデータテーブル、周波数特性を表す伝達関数の3要素でモデルを構成できた。
3.3 製品の定常状態の挙動の再現結果
本技術によって製品規模での挙動解析が可能になったことを、スイッチング電源の駆動波形の解析結果を例として述べる。
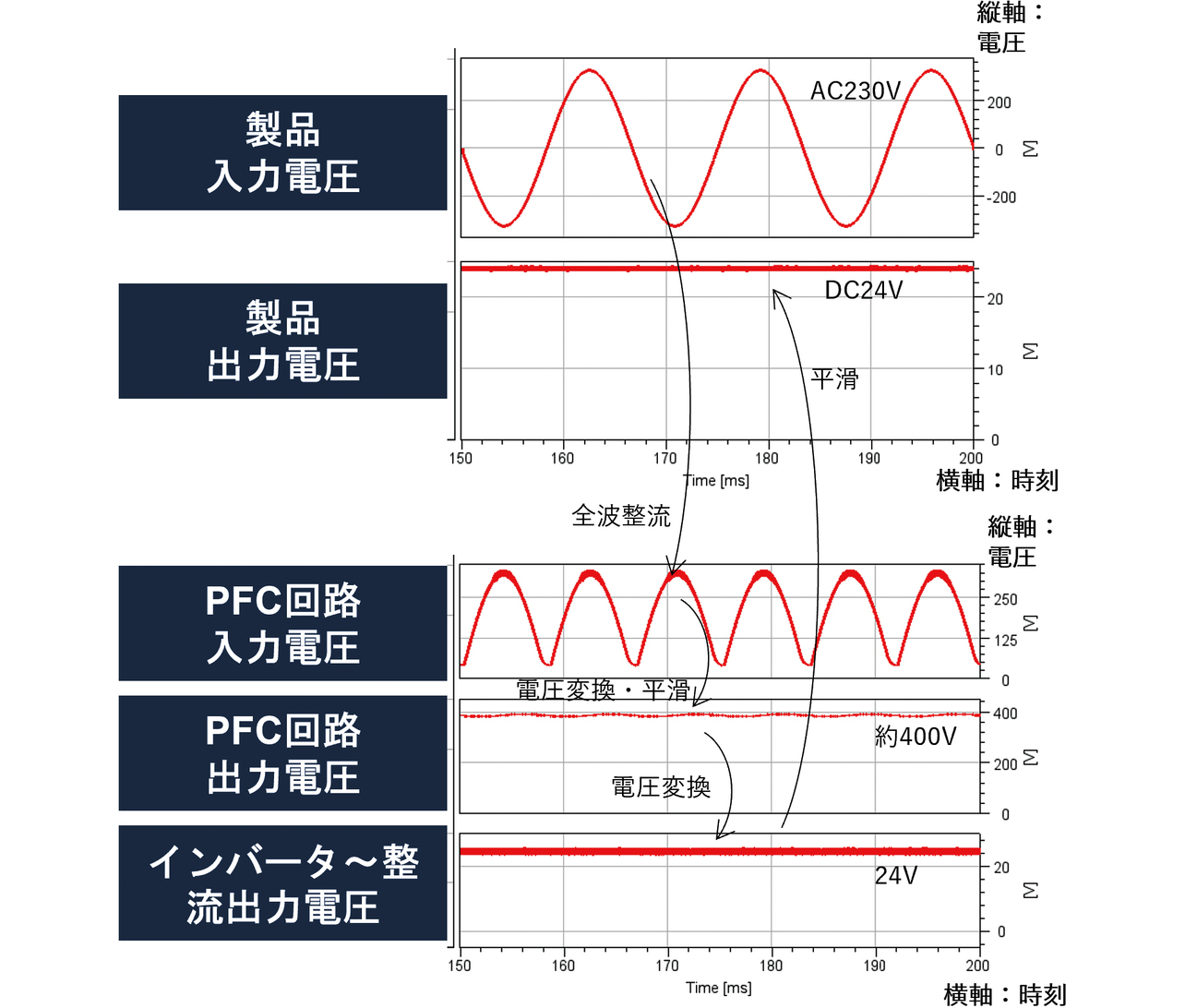
図6の上段に示すとおり、スイッチング電源回路にAC電圧を入力し、DC電圧を出力できることを確認した。これは、主機能のAC⇒DC電力変換そのものである。また、図6の下段に示すとおり、製品入力電圧を整流した全波整流波がPFC入力部で確認でき、これを一定電圧へ変換した波形がPFC出力部で確認できた。インバータ~整流部出力では、PFC出力部の電圧を降圧した波形が確認できた。
つぎに、モデルが定常状態の波形を正しく出力できていることを説明する。定常状態の波形を適切に確認できる回路箇所として、入力と出力条件によって制御状態が変化し異なる波形を示すPFC回路を対象とした。PFC回路は、矩形波によるスイッチングで内部電圧を一定に保つ動作を行い、入力電圧および出力負荷に応じてスイッチング電圧波形が変化することが広く知られている。この挙動は製品内の大部分の回路が影響することから、モデル化の難易度が高い。本検証では、外乱を加えないときの定常状態として、入力電圧および出力負荷を最小・最大にした場合のPFC回路のスイッチング電圧の波形を確認した。
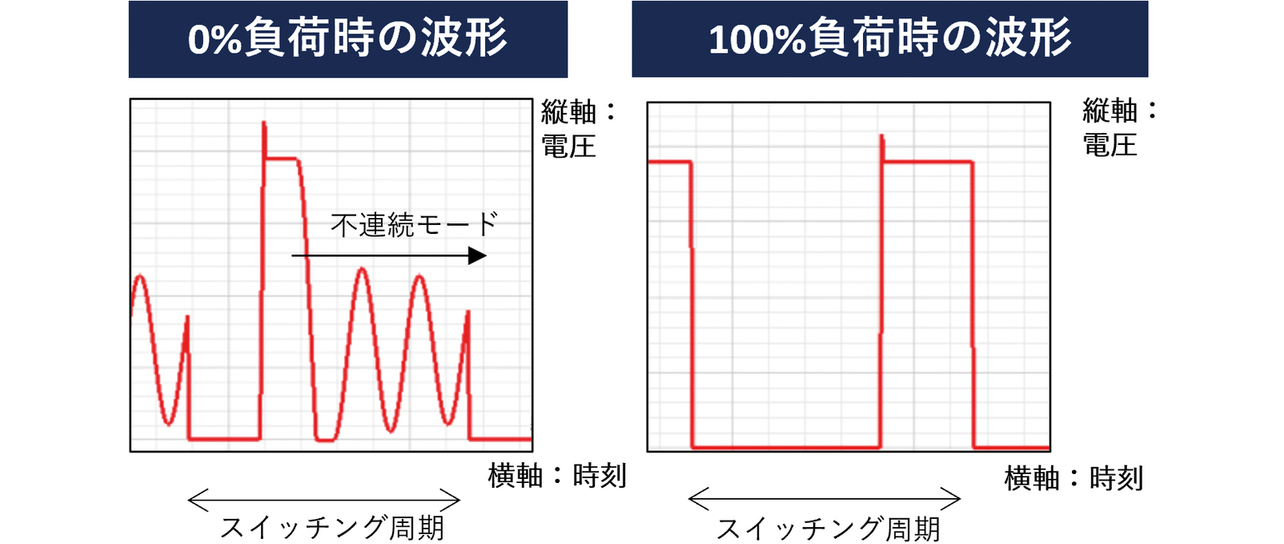
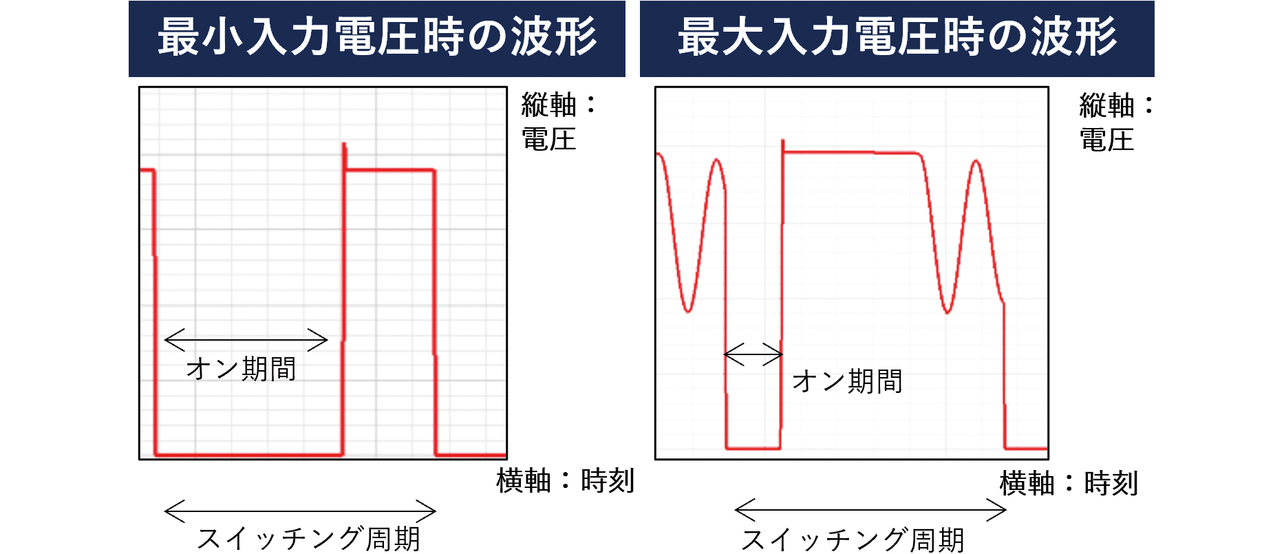
定常状態でのスイッチング電圧波形の解析結果を図7および図8に示す。図7は入力を最小としたときの0%負荷(無負荷)、100%負荷(定格負荷)の2条件の波形である。図8は定格負荷としたときの、入力電圧が仕様の最小値と最大値の2条件である。解析結果はスイッチングで生じる矩形波を再現しており、入力電圧と出力負荷容量に応じた波形を出力できていることを確認した。
検証で用いたスイッチング電源は昇圧チョッパ方式のPFC回路を搭載しており、図7より0%負荷のときは波形が振動する不連続モード、100%負荷のときは連続した矩形波となる連続モードの動作になっている。また、図8より最小入力電圧のときはオン期間が長く、最大入力電圧のときはオン期間が短くなっている。これらは昇圧チョッパ一般の特徴5)であるため、妥当な結果である。
これらの解析結果より、モデルがスイッチング電源の主要な機能を再現しており、製品全体の挙動を正しく解析できることを確認できた。
3.4 外乱を加えたときの挙動の再現結果
外乱に対する製品の挙動を再現した結果について説明する。スイッチング電源の入力部に外乱波形を与え、製品の内部で発生する過渡的な挙動の波形が実測同様に再現することを確認した。以降の3.4.1項で与えた外乱を示し、3.4.2項で実測と解析結果の比較を示す。
3.4.1 製品に加える外乱の波形
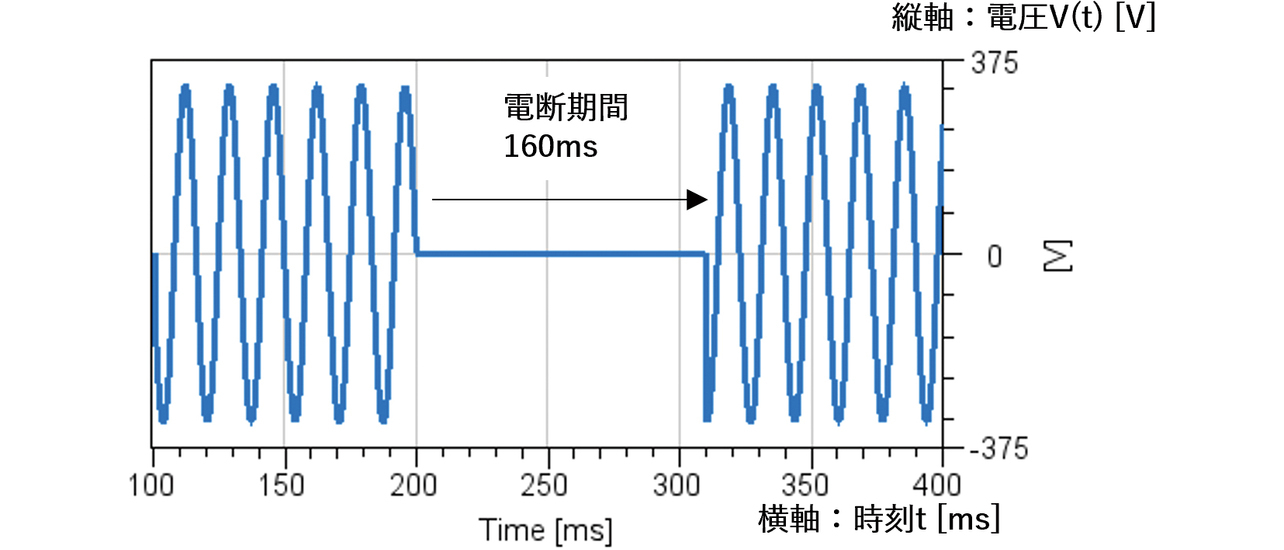
電源入力部を有する製品への代表的な外乱のひとつに、入力電源の電断がある。JIS C 61000-4-11に規定されるように、通常の入力電圧を維持した後、一定期間入力電圧を低下させ、その後入力電圧を戻す一連の電圧変動である。特に電圧低下が100%のときを電断と呼ぶ。以下の図9に示すとおり、本解析ではAC 230 Vで動作するスイッチング電源に対し、160 msの電断を外乱として加えた。
3.4.2 過渡的な挙動の実測波形と解析結果の比較
前項に示す外乱を加えた結果、実測と解析結果が同様の挙動を示した。検証したスイッチング電源は、外乱に対して過渡的な電圧ストレスが発生しない通常サンプルと、意図的に対策部品を外した対策なしサンプルの2種類があり、それぞれに外乱を加えた結果について論じる。
表3の2行目に示すとおり、通常サンプルでは電断によって内部のスイッチング電圧が低下するが、電断が終わると元の電圧レベルに戻る。通常サンプルは、電断の外乱に対して安定して動作する結果となった。
| 製品 | 観測箇所 | 解析結果 | 実測結果 |
|---|---|---|---|
| 通常サンプル | スイッチング電圧(全体) | 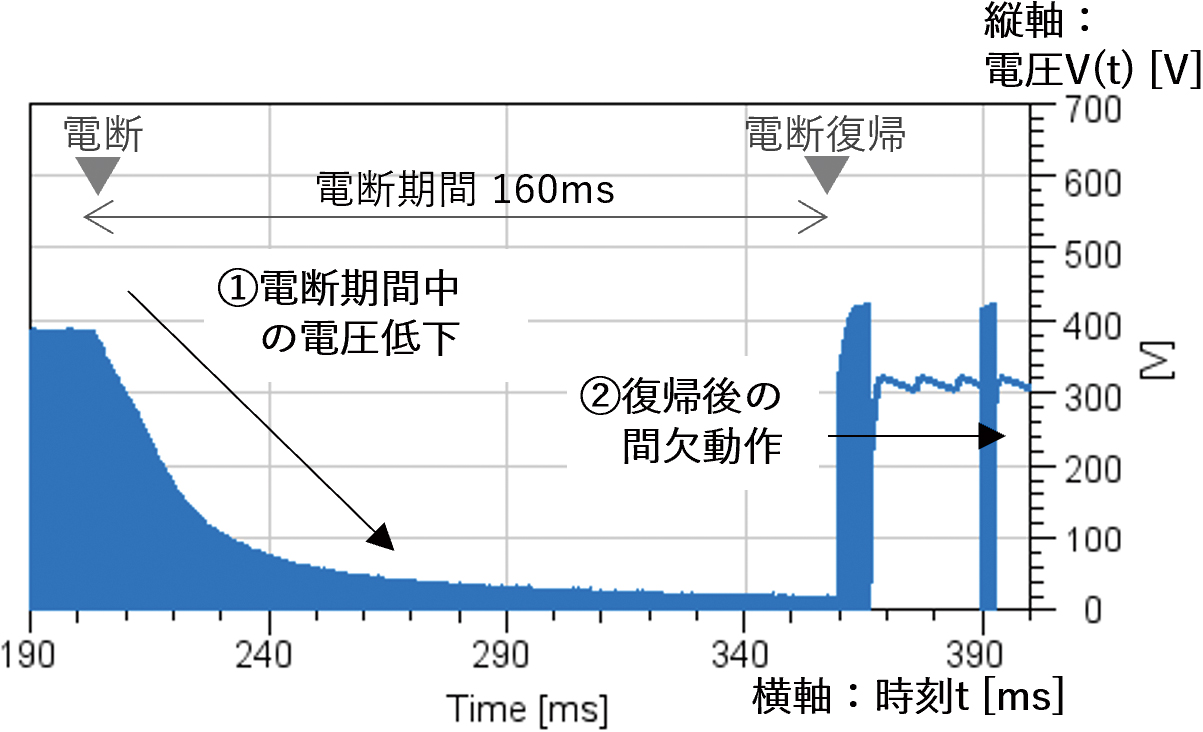 |
 |
| 対策なしサンプル | スイッチング電圧(全体) | 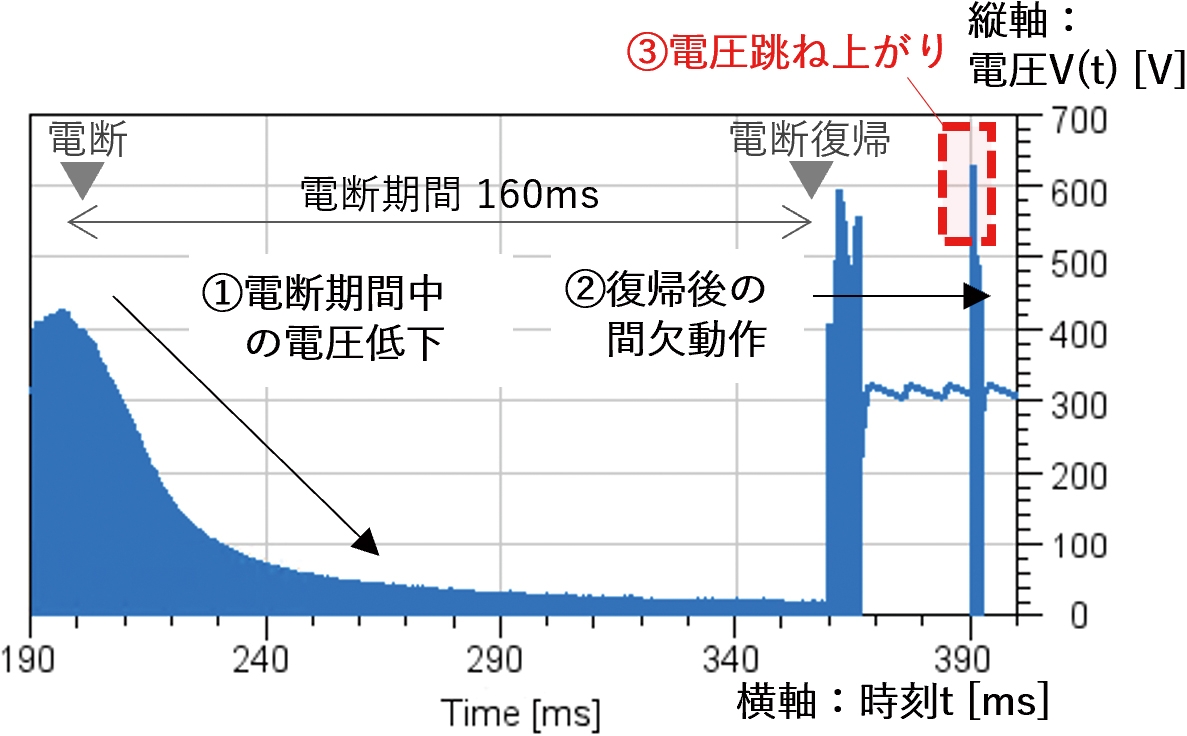 |
 |
| スイッチング電圧(拡大) | 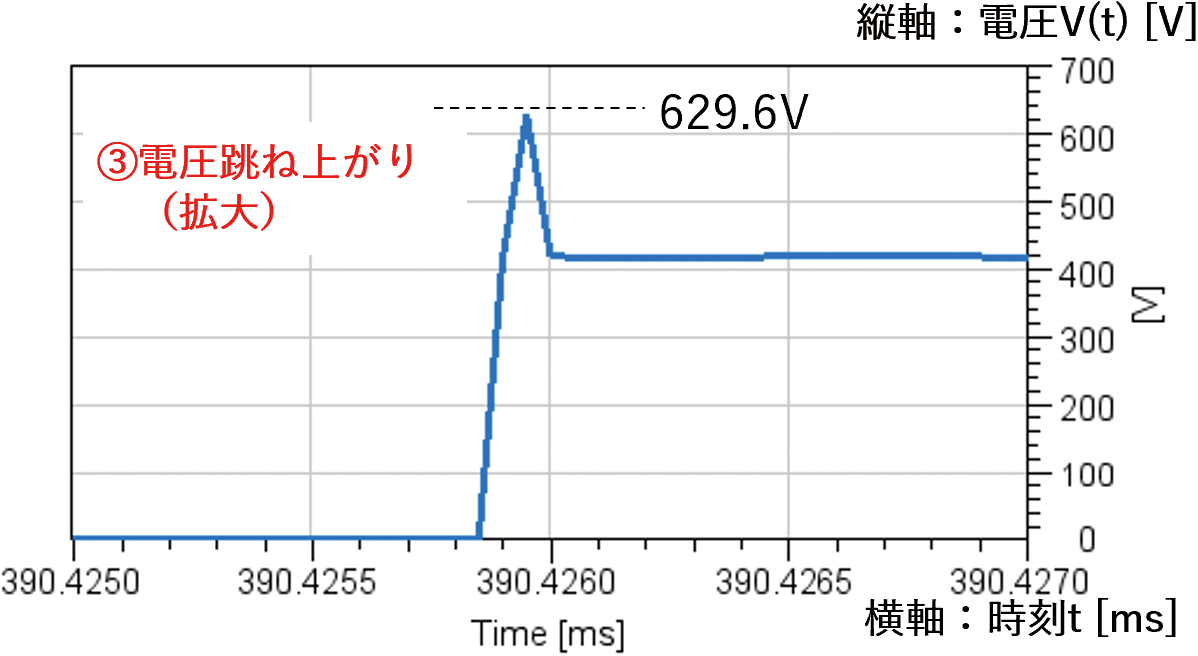 |
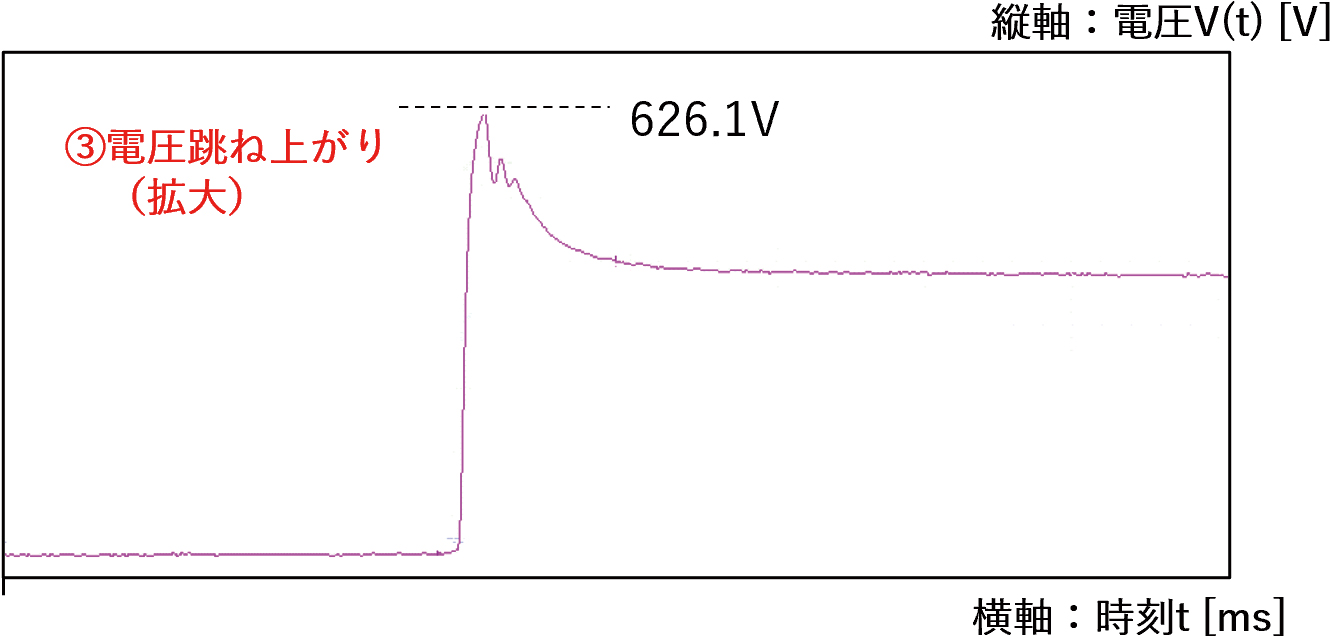 |
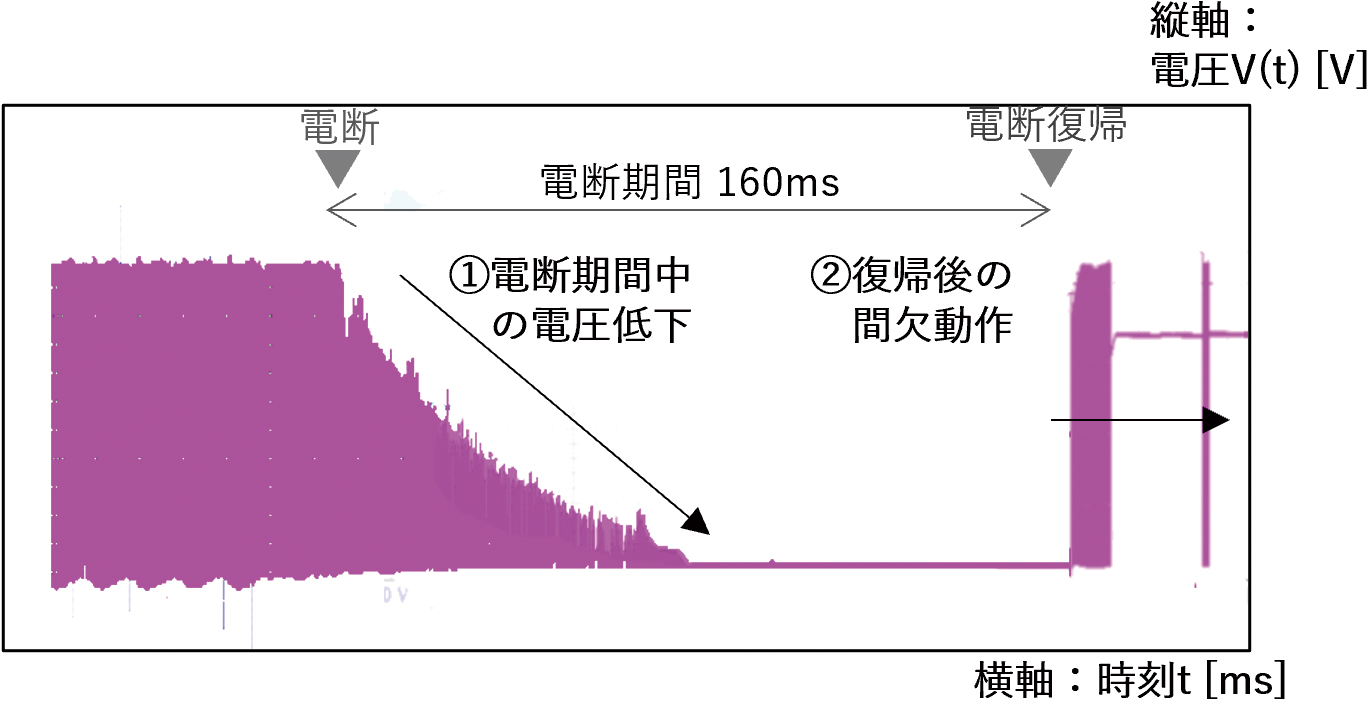
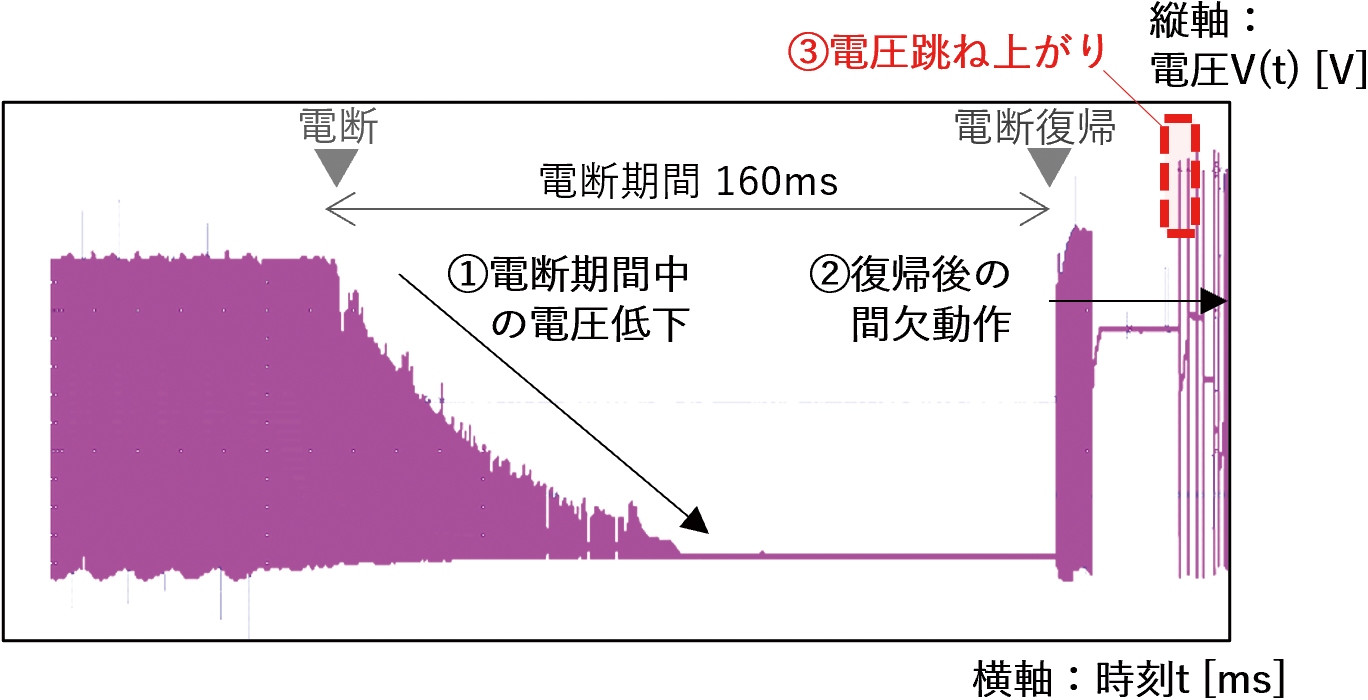
一方で表3の3・4行目に示すとおり、対策なしサンプルでは実機と解析結果の両方で、電断復帰時にスイッチング電圧の過度な上昇が生じる挙動が確認できた。この挙動は、以下の①~③に示す3つの現象が重要な特徴であった。
- ① 電断期間に、スイッチング電圧が低下する。
- ② 電断復帰時に、低下したスイッチング電圧は①の電圧レベルに戻り、その後間欠動作を繰り返す。
- ③ 電断復帰時の間欠動作において、スイッチング波形の跳ね上がりが生じる。
これら3つの現象の波形は実測と解析で同じ①~③の特徴を示した。また、電圧跳ね上がりの最大値は、実測と解析で近い値となった。よってこの結果から、外乱に対する製品の過渡的な挙動を再現したといえる。
4. シミュレーション結果から不安定な挙動を示す外乱範囲を動的に探索する手法
4.1 モデルからインプット範囲を抽出する手法の概要
本手法は、3章で述べたモデルの解析のインプットとアウトプットの定量化と、アウトプットから次のインプットを決定する探索を動的に繰り返す適応型実験計画法によって構成した。
まず、システムモデルのインプットとアウトプットの定量化について説明する。システムモデルを適応型実験計画法で利用するために、モデルのインプットをパラメータとして定義し、モデルがアウトプットする波形を定量化する必要がある。
システムモデルへのインプットは、外乱波形の特徴を表すパラメータとした。電断の外乱の場合は、3.4.1項に示す電断時間[ms]や電断期間中の電圧低下率[%]がシステムモデルにインプットするパラメータに相当する。
システムモデルのアウトプットは、モデルの解析結果から得られる波形の特徴量とした。電気波形の特徴量は、数学的な演算によって抽出した。たとえば最大値、最小値、平均値などが特徴量を抽出する関数に相当する。
つぎに、動的な条件探索を実現する適応型実験計画法について述べる。本手法は、ESTECO社の最適化ソフトウェアであるmodeFRONTIER 2022R3に搭載されている適応型実験計画法のアルゴリズムであるLipschitzサンプリング6)を動的な探索方法として使用した。範囲の探索においては、不安定な条件を発見することだけでなく、不安定な挙動が発生する条件と発生しない条件の境界を含めた範囲を特定する必要がある。そのため、定量化したアウトプットの変動が大きい条件を集中的に探索するLipschitzサンプリングを動的な探索アルゴリズムとして用いた。Lipschitzサンプリングは、モデル化された現象の振る舞いに重要な変化が起こる領域を絞り込む場合に有効である。
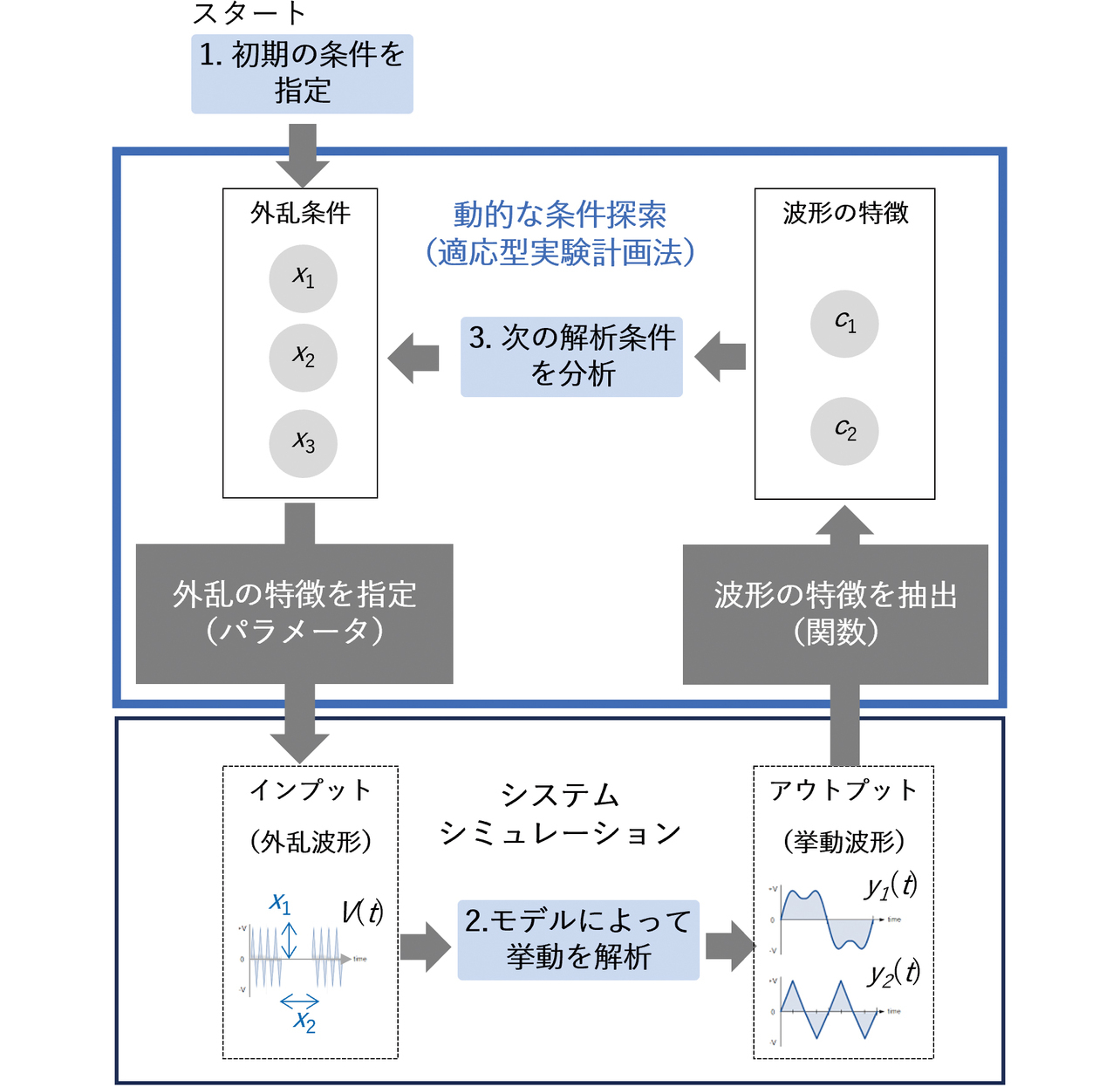
上記の動的な条件探索を実現する一連の手順を図10に示す。初期の外乱条件を指定し(手順1)、システムシミュレーションによって挙動の解析結果の波形を得る(手順2)。この波形の特徴量を適応型実験計画法によって評価し、次の解析条件を指定する(手順3)。その後、手順2~手順3の一連のサイクル繰り返すことで、外乱条件範囲を効率的に探索する。
4.2 適応型実験計画法による不安定範囲の探索結果
3章に示したスイッチング電源のシステムモデルを用いて、対策なしサンプルにおける過渡的な電圧の跳ね上がりの挙動を例として、不安定な挙動が発生する外乱範囲を抽出できることを説明する。
探索には表4のとおり定量化した指標を用いた。電断の外乱と製品使用条件を表すパラメータをインプットとし、PFC回路のスイッチング電圧の最大値を定量化したアウトプットとした。探索条件は、スイッチング電圧が素子の高ストレス領域である600 Vを超える範囲とした。
| 種別 | 定量化した指標 |
|---|---|
| インプット | 1)電断条件のパラメータ … 電断時間[ms]、電断率[%] 2)製品使用条件のパラメータ … 入力電圧[V]、出力負荷[W] |
| アウトプット | 3)スイッチング部の最大電圧 ※ …MAX()関数 ※600 Vを超えると高ストレス領域 |
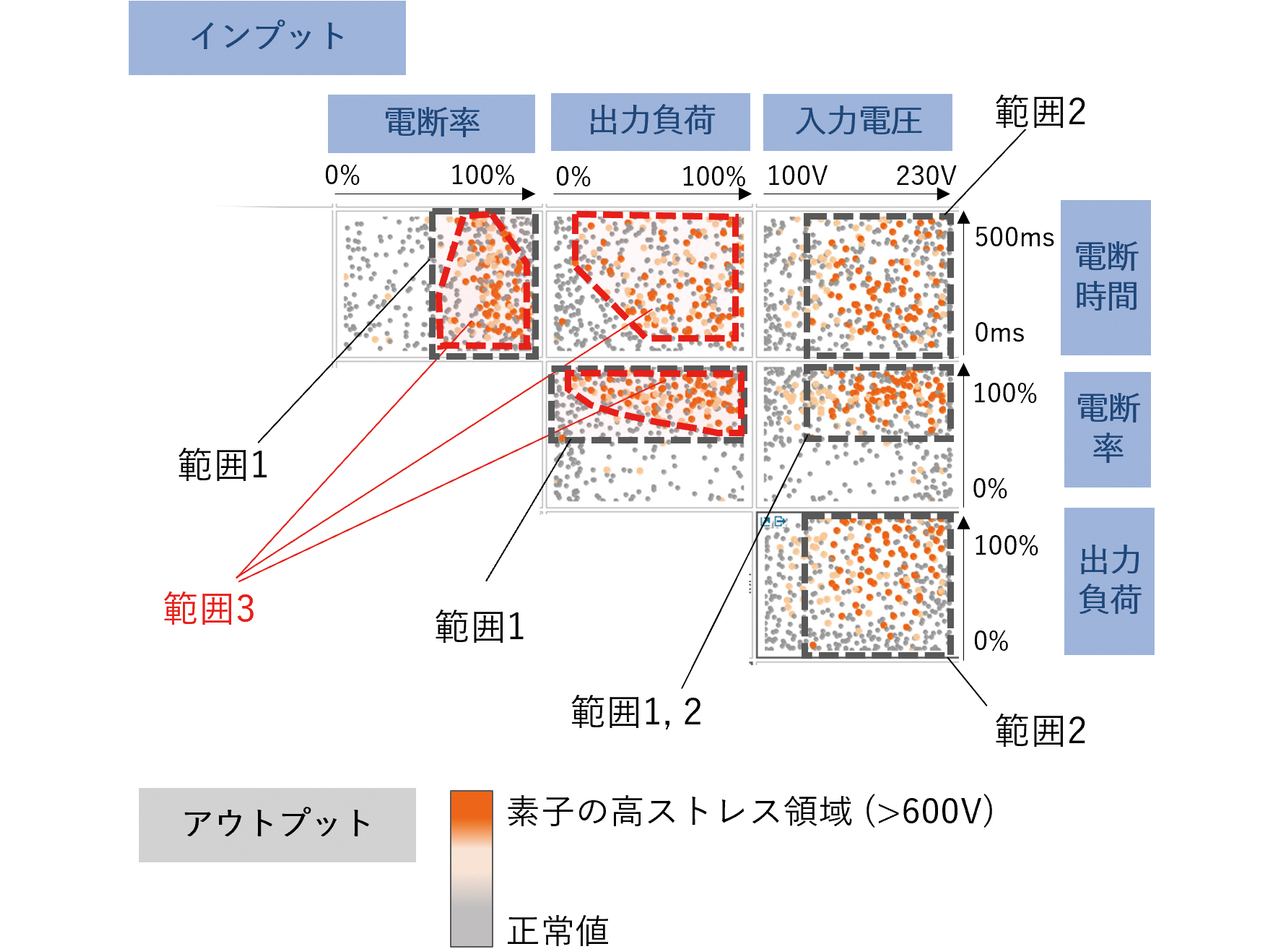
上記の指標から動的に条件を決定し、システムシミュレーションで解析することで、必要な数のインプットに対応するアウトプットのデータを得た。インプットとアウトプットの関係性を散布図プロットで可視化した結果を図11に示す。探索によって、電圧が素子の高ストレス領域に達する条件を以下のように特定することができた。
- 範囲1. 電断率が47%以上の時、高ストレス領域に達する。
- 範囲2. 入力電圧が130 V以上の時、高ストレス領域に達する。
- 範囲3. 電断率・電断時間・出力負荷の交互作用によって、特定の範囲で高ストレス領域に達する。
また、解析データ数はn=456であり、これは4パラメータの静的な探索(しらみつぶし)に換算すると、1パラメータあたり4.6水準での探索に相当する。静的な探索によって同様の分析結果が得られる範囲を導出するためには、1パラメータあたり8水準、つまりn=4096の解析データが必要と見込まれるので、動的な探索によって不安定な挙動を示す領域を効率的に探索できたといえる。
併せて、図11では素子の高ストレス領域とその周辺の領域が密に探索できており、正常値となる条件では疎となっていることがわかる。これはLipschitzサンプリングの探索の特徴であり、不安定と定めた条件範囲を的確に探索し可視化できたといえる。
5. 本手法の有効性
5.1 推定範囲の実機との一致性
本手法によって推定した不安定範囲を、実測で確認した実際の不安定範囲と比較し、範囲推定手法として妥当であることを述べる。本節では、設計での手戻りが必要かを検証する観点から、不安定な範囲と正常値を示す範囲を以下のように区別して呼ぶ。
- Pass…素子の高ストレス領域(600 V)以下となる条件
- Fail…素子の高ストレス領域(600 V)を超える条件
4.2節で探索した条件のうち、交互作用を含む出力負荷と電断時間のFail範囲は実測でのFailの傾向とよく一致した。
図12に、スイッチング部の電圧最大値をモデルから得た結果と、実測の結果を示す。左が解析結果、右が実測結果で、色をつけた箇所がFail範囲である。固定した条件は電断率=100%、入力電圧=230 Vで、変化させた条件は出力負荷、電断時間である。
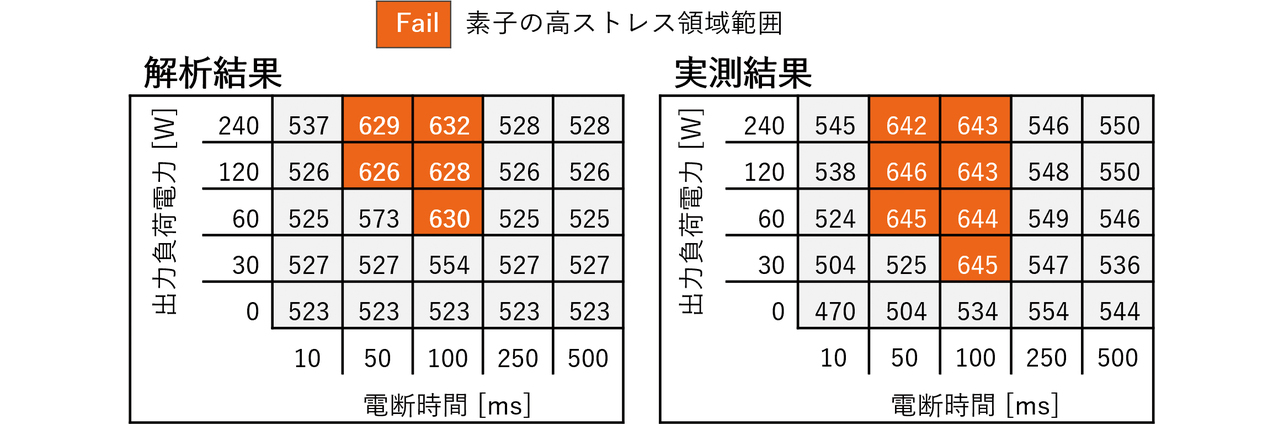
確認した25条件のうち、23条件でPass/Failを正しく判定できた。加えて、実測と解析のいずれも電断時間と出力負荷電力の特定の範囲にFailが集中する傾向が見られた。
一致しない2条件においては、解析ではPassと判定するが、実測ではFailであった。これは、電気回路モデル(非因果モデル)の再現精度によって、解析値は実測値より低くなる傾向が生じているためである。一方で、解析でFailと判定した条件は、すべて実機でも同様にFailとなる条件であった。
これら2つの観点を総合的に評価し、統計解析の指標である再現率・適合率を算出すると、表5のとおり再現率は71%、適合率100%となった。
| 観点 | 再現率 | 適合率 |
|---|---|---|
| 考え方 | 実際のFailを、何%正しく特定できたか | 解析で特定したFailのうち、何%が本当にFailだったか |
| 意味合い | 不安定条件の取りこぼしがないことを示す精度 | 誤判定なく不安定条件を発見する精度 |
| 計算式 | (解析と実測がFailとなる条件数)÷(実測のFail条件数) | (解析と実測がFailとなる条件数)÷(解析のFail条件数) |
| 計算結果 | 71.4% (5/7) | 100% (5/5) |
Failを示す範囲は実測と解析で重なっており、また再現率・適合率がともに目安である70%を上回る。上記の理由により、本手法によって抽出した外乱によるFail範囲が、実際に発生するFail範囲を推定できたといえる。
5.2 範囲を推定することによる効果
本技術によって、製品開発において課題であった外乱に対する不安定な挙動が発生する条件範囲を、効率的に発見することが可能になる。特に、実機試作前の机上検証時に電気的外乱に対する不安定動作を発見し対処することで、その後の後戻りのリスクを低減する未然防止の効果が得られる。5.1項での一致性で不安定な挙動範囲の推定が実現できたことを示せており、本技術は課題解決に有効である。
また、実機を使って製品全体の挙動を解析する従来の製品開発と比較して、実機では分析が困難であった制御回路の挙動の分析も容易になり、設計の質の向上が期待できる。
6. むすび
製品開発において、限られた検証期間で外乱に対して不安定な条件を的確に発見し対処することが課題であった。
本稿では、因果モデルを付加したシステムシミュレーション技術により、製品全体を対象とする規模の電気的挙動の解析を可能にした。不安定条件の動的な探索手法により、広い範囲の条件から効率的に不安定となる条件を発見することを可能にした。
その結果、電気的外乱によって生じる製品の不安定な動作の発生範囲を特定する技術を構築し、試作後に設計工程まで後戻りするリスクを低減できる効果があることを示した。これにより、製品開発での限られた検証期間においても、電気的外乱に対して不安定な挙動を示す条件を設計段階で発見し対処できる効果が期待できる。
今後にむけては、市場や使用環境でのあらゆる挙動を検証可能にするために、モデルで解析可能な電気的外乱のバリエーションを増やすことが技術課題である。また、実用化に向けては、多数かつ複雑な条件に対応するための適応型実験計画法の使いこなしを中心とした探索手法の高度化が課題である。このような課題解決に引き続き取り組み、外乱に対する安定動作を論理的に担保する技術の開発での実践をより早く実現する。
参考文献
- 1)
- 国際標準記述によるモデル開発・流通検討委員会, 自動車システムのモデルベース開発入門, 公益社団法人 自動車技術会, 2017, pp. 2-3.
- 2)
- 日本産業標準調査会, JISC61000-4-11, 2021
- 3)
- 江口啓. “1群-7編-6章 6-5 スイッチング電源回路”. 電子情報通信学会『知識の森』. https://www.ieice-hbkb.org/files/01/01gun_07hen_06.pdf(Accessed: Nov. 1, 2023)
- 4)
- 佐藤尚一, “OPアンプの2大トラブル「オフセットと発振」の原因と対策,” トランジスタ技術, vol. 51, no. 12, pp. 124-132, 2014.
- 5)
- 堀考正. インターユニバーシティ パワーエレクトロニクス, オーム社, 1996, pp. 89-91.
- 6)
- A. Lovison and E. Rigoni, “Adaptive sampling with a Lipschitz criterion for accurate metamodeling,” Communications in Applied and Industrial Mathematics, vol. 1, no. 2, pp. 110-126, 2010.
本文に掲載の商品の名称は、各社が商標としている場合があります。