














磁性体による磁場変動を利用したワイヤレス地磁気車両センサ
- ワイヤレス地磁気車両センサ
- 停止車両検知アルゴリズム
- 自動運転
- 地磁気検出素子
- エンジン部分検出アルゴリズム



従来の車両検知センサである超音波式やループコイル式、画像式のセンサでは設置上の手間や設置条件の制約に課題があった。われわれはこれら課題を解決するため、ワイヤレス地磁気車両センサの開発に取り組んだ。
この開発の中では、内蔵電池だけで長期稼働を実現するための省電力設計と、限られた動作条件の中で精度を担保するために独自のアルゴリズムの開発を行った。このアルゴリズムは、車両のエンジン部分の影響による磁場変動と、その後の磁場変動を追従することで、車両を検知する仕組みとした。また、アルゴリズムを実装したセンサを用いて、フィールド試験を行った結果、100%という高い検知率が得られ、技術の有効性を確認することができた。
このセンサは、駐車ますの空き状況を高精度に捉え、駐車場利用者への「空きマス誘導」のサービスに加え、シェアサービスや自動運転社会への価値を提供することができる。さらに、今回の開発では車両に踏まれても壊れない耐荷重筐体の実装に取り組んだ。これらの成果はセンサのメンテナンス性を向上し、数多く設置するIoTセンサとしての活用が期待される。
1. まえがき
近年、ドライバーに道路の様々な情報を提供するシステム及び自動運転社会に向けて路車間で情報を提供するシステムの高度化が進んできている。その一つとして、駐車場利用者・利用車両に対して、リアルタイムに駐車場の混雑状況の提供や空きマスへの誘導を行うシステムがある。このシステムの対象となる駐車場は高速道路のサービスエリア・パーキングエリアや、市街地の駐車場(コインパーキング、マンションの駐車場)などである。このシステムは駐車場の混雑状況や空いている駐車ますをドライバーに提供することで混雑の偏りを軽減するだけではなく、将来のパークシェアサービスや自動運転社会の加速につながる可能性がある。
このシステムを実現するためには、駐車場内の満空情報に加え、個別の駐車ますの空き状況を判別し、かつ設置容易性及びメンテナンス性が高いセンサが求められる。個別の駐車ますに停止する車両を検知するセンサとして、ループコイル方式 1)、超音波方式、及び画像方式 2)3) の3種類のセンサが挙げられる。ループコイル方式、超音波方式は車両検知精度が高く、上述の情報提供システムに親和性が高いが、路面の掘り起しやアームの取り付け等による設置、配線を行う必要があり、設置性に欠ける。また、駐車ますの柔軟な変更に対応が難しい。画像方式では、一台のカメラで複数の駐車ますを検知することが可能であるが、設置時のパラメータ調整や耐環境性の乏しさによるメンテナンスが必要となるという課題があった。
一方近年、センサ素子、無線素子の小型化・省電力化、電池の小型化・長寿命化が進み、完全にワイヤレスな環境でセンシングを行うことが可能となってきた。これらの技術的進歩をふまえ、省電力な地磁気検出素子(MI素子)を活用したワイヤレス地磁気車両センサの開発に取り組んだ。
地磁気検出素子は、地球が持つ磁性及び周辺の磁場環境の変化を磁束密度で捉えるセンサであり、この特性を利用して周辺の磁性体を検知することが可能である。また、本開発で使用するMI素子(磁気インピーダンス素子)は、同じ磁束密度を計測できる他の素子(ホール素子やMR素子)に比べて感度が高く、道路の路面上に設置したセンサから車両の地上高の距離程度離れた位置の磁性体の移動を変化として捉えることが可能である。
本論文では、2章で本開発で実装したワイヤレス地磁気車両センサの構成を説明し、3章で地磁気検出素子の出力から単純な変動値の大きさで車両と判断する基本アルゴリズムとその問題点について述べる。4章では、この課題を解決するために構築した車両特有の磁場変動を捉えるアルゴリズムについて説明し、このアルゴリズムを実装したワイヤレス地磁気車両センサを用いたフィールド実験の結果を5章で報告する。
2. センサの構成
本章では、今回の開発で実装したワイヤレス地磁気車両センサの構成について述べる。 本センサは駐車ますの路面上に据え置くタイプとし、車両に踏まれても壊れない耐衝撃を加味した筐体設計を行った。厚さ40 mmで車両の衝撃に耐えるため、平面上300 mm四方の筐体として設計を行った。図1に外観を示す。

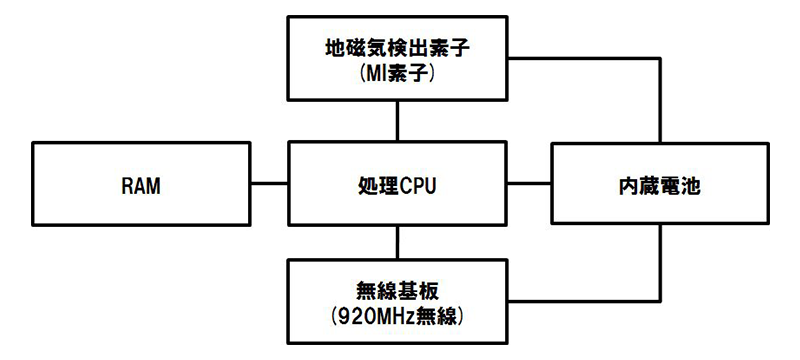
また、図2にセンサ構成のブロック図を示す。本筐体内に地磁気検出素子、処理CPU、無線基板及び内蔵電池を配置した。なお、地磁気検出素子、処理CPU、無線基板はすべて内蔵電池で駆動する構成とした。これにより、完全ワイヤレス化、小型化を実現し、電源の供給やデータ取得のための配線をする必要がなく、設置容易性を高いセンサとした。さらに、本論文では触れないが、周辺の微小ノイズや地磁気の経年変化に追従する機能、無線でのリセット機能等を搭載し、メンテナンス性を向上する取り組みも実施した。
3. 基本アルゴリズムと課題
3.1 基本アルゴリズム
磁束密度はベクトル量であり、地磁気検出素子では3軸方向についてのスカラー量を個別の出力としている。本ワイヤレス地磁気車両センサでは、これら3軸の値からベクトルの絶対値を算出して使用する。基本アルゴリズムでは、車両が駐車ますにいない状態を基準( )として、計測時の地磁気の磁束密度(
)として、計測時の地磁気の磁束密度( )との差分値、「磁場変動量(
)との差分値、「磁場変動量( )」の大きさが一定以上になれば車両として判断するものとした。ここでは
)」の大きさが一定以上になれば車両として判断するものとした。ここでは

である。
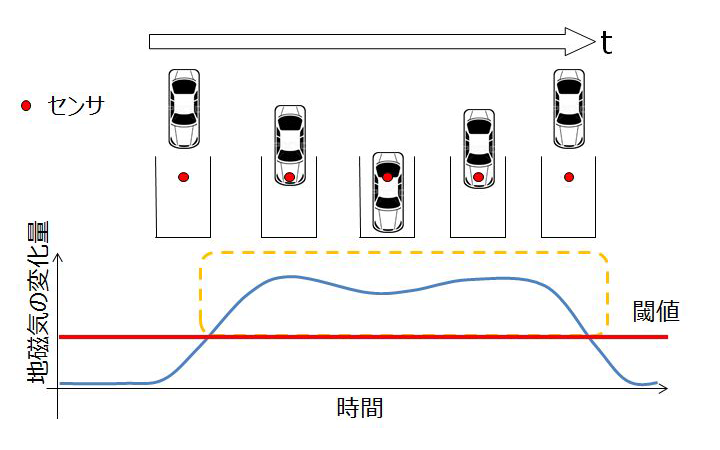
図3に基本アルゴリズムにおける、車両が駐車ますに駐車したときの「磁場変動量」の推移と判定結果を示す。任意の値に閾値を設け、閾値以上であれば「車両」を検知することとした。
3.2 基本アルゴリズムで発生する問題
本開発の中で磁場変動量について、定量的に調査を行った結果の概略を図4に示す。
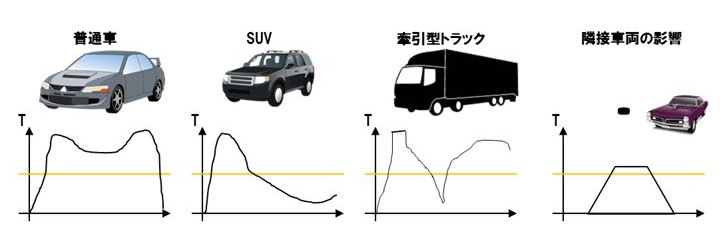
基本アルゴリズムでは図4の最左に示す「普通車」のように車体のどの部分においても閾値を超える車両を想定していた。しかし、中央の「SUV」と「牽引型トラック」のように車体の一部に閾値を下回る磁場変動量しかないものがあった。さらに、最右の「隣接車両の影響」のように検知したい駐車ますに車両がない状態においても外部からの影響で閾値を超えてしまうものが一部あったため、本アルゴリズムにおいて検知できない車両があるという問題があった。
3.3 課題
前項で述べた車体の一部が閾値を下回り車両を検知できない問題と、一部の車種が隣接駐車ますに駐車した際に誤って車両として検知してしまうという問題の2つを同時に解決することが求められる。
本開発では、エンジンやモータが磁性体である鉄を多く含んでいることから、エンジン部分はどの車両でも地磁気に大きな影響を与える点に着目し、この大きな磁場変動量を捉えることに着目したアルゴリズムを採用した。また、その後の磁場変動量を追従することで、車両特有の磁場変動を認識し、検知したいセンサを設置した駐車ますに駐車した車両と検知したくない隣接駐車ますに駐車した車両を切り分けることを課題と設定し、課題解決に取り組んだ。
4. 停止車両検知アルゴリズム
4.1 エンジン部分検出アルゴリズム
前述の通り、車種、車両の部位によって「磁場変動量」は異なるが、エンジン部分では車種にかかわらず、隣接駐車ますに駐車した車両をはるかに超える「磁場変動量」を示す。なお、センサは駐車ますの前方より1/4の場所に設置することとする。
車両の入庫方法と磁場変動量の関係について、図5では「前進入庫」について、図6では「後進入庫」と「通り抜け入庫」について示す。図5に示すとおり、駐車ますに対して前進で入庫し、後進で出庫する「前進入庫」のパターンにおいては、入庫時にエンジン部分が通過してから車両を駐車し、出庫時にはもう一度エンジン部分が通過する。また、図6の上側図のように、駐車ますに対して後進で入庫し、前進で出庫する「後進入庫」、及び図6の下側図のように駐車ますに対して前進で入庫し、前進で出庫する「通り抜け入庫」の両パターンにおいては、駐車が完了した際にセンサ直上にエンジン部分が来ることとなる。このように、エンジン部分は駐車ますに駐車をする際に必ずセンサ上を通過するタイミングがある。この点に着目し、満閾値と空閾値の2つの閾値を持ち、エンジン部分の高い変化を検出するアルゴリズムを構築した。
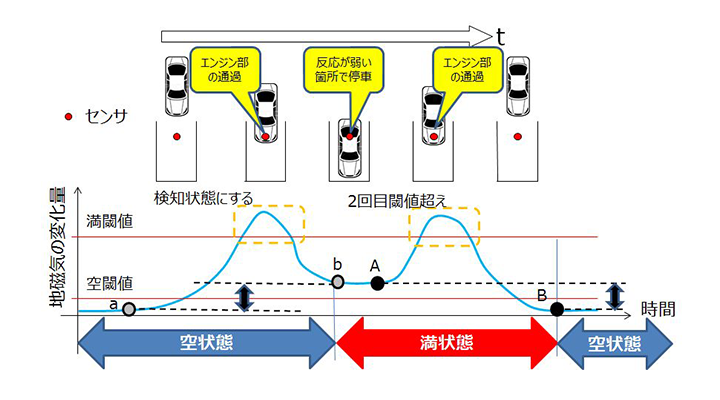
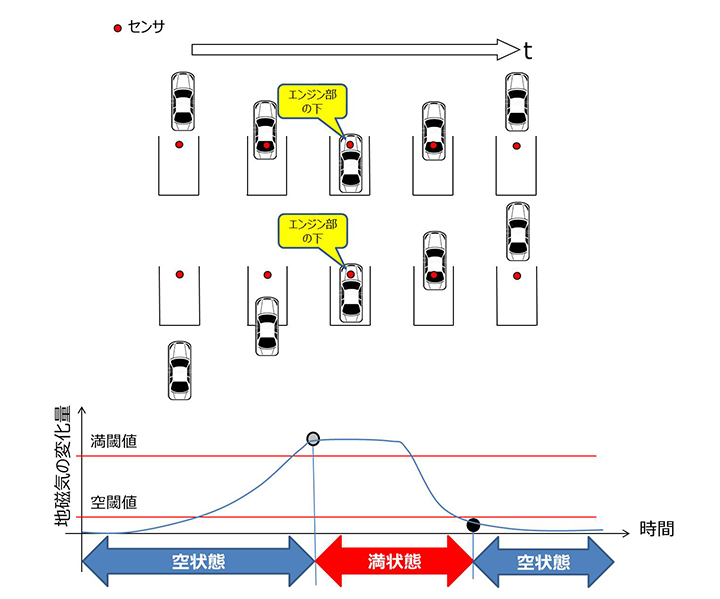
「前進入庫」した場合、エンジン部分で満閾値を超える変化を示し、駐車中は初期状態からの磁場変動量が空閾値と満閾値の間の低い値Aとなる。本アルゴリズムでは、満閾値以上の変化後、一定以上の磁場変動量を示せば車両検知状態とする。出庫の際は再度エンジン部分の影響により、満閾値を超える変化を示し、完全に出庫した後に駐車中の値Aよりも小さい値Bとなる。本アルゴリズムでは、このBの値が空閾値を下回るか、車両検知状態から満閾値を超える値の変化があった場合その前後(A-B)に一定の変化があれば、車両検知状態を解除する。
また、車両が「後進入庫」または「通り抜け入庫」した場合、入庫後車両が出庫するまで常に満閾値を超えた状態となり、一定時間経過すると車両検知状態とする。また、同様に出庫時は空閾値を下回るため、車両検知状態を解除する。
4.2 効果
本アルゴリズムにより、3章で述べた2つの課題を同時に解決する。基本アルゴリズムでは「SUV」と「牽引型トラック」のように車体の一部に閾値を下回る磁場変動量しか示さない車両について、エンジン部分の大きい磁場変動量を検出することで、駐車した際の磁場変動量が小さくても出庫の際のエンジン部分検出までの間車両検知状態を継続させることが可能となった。また、基本アルゴリズムでは、検知したい駐車ますに車両がない状態でも影響の強い車両が駐車すると誤検知起こしてしまった。このような外部からの影響で閾値を超えてしまうものについては、エンジン部分の影響に比べると、反応が小さいため、本アルゴリズムでは排除が可能となった。
5. 実験結果
5.1 実験条件
駐車ますの車両検知で使用するためには、様々な駐車パターンを想定する必要がある。本ワイヤレス地磁気車両センサの実験で実施した駐車パターンは①前進駐車、②後進駐車、③通抜駐車の3パターンである。通り抜け駐車とは、サービスエリア・パーキングエリアなどの前後に区切りのない駐車場において、片方の駐車ますを通り抜けて駐車することを指す。対象車種は軽自動車、コンパクトカー、ミニバン、セダン、ワゴン車、SUV、1BOX、トラック、EV車、電気自動車の10車種とした。各車種の内訳を表1に示す。
| 車種 | 車種数 車種 |
試験回数 (回) |
前進駐車 試験回数 (回) |
後進駐車 試験回数 (回) |
通抜駐車 試験回数 (回) |
|---|---|---|---|---|---|
| 電気自動車 | 3 | 3 | 1 | 0 | 2 |
| コンパクトカー | 15 | 98 | 43 | 20 | 35 |
| ミニバン | 14 | 109 | 49 | 30 | 30 |
| セダン | 21 | 122 | 53 | 35 | 34 |
| ワゴン車 | 9 | 54 | 20 | 15 | 19 |
| SUV | 13 | 76 | 29 | 20 | 27 |
| 軽自動車 | 21 | 133 | 67 | 41 | 25 |
| トラック | 4 | 18 | 11 | 0 | 7 |
| 1BOX | 1 | 4 | 1 | 0 | 3 |
| 計 | 101 | 617 | 274 | 161 | 182 |
5.2 実験結果
前項で述べた実験条件で実施した実験結果を表2に示す。実験結果から、本センサは駐車パターンや車種にかかわらず高精度で検知可能であることが分かる。検知率は100%であり、従来の他方式のセンサと同等レベル以上の検知率である。
| 駐車パターン | 試験台数 | 検知台数 | 検知率(%) |
|---|---|---|---|
| 前進駐車 | 274 | 274 | 100 |
| 後進駐車 | 161 | 161 | 100 |
| 通抜駐車 | 182 | 182 | 100 |
| 計 | 617 | 617 | 100 |
6. まとめ
6.1 考察
本アルゴリズムは、多種多様な車種に対する実験結果から得られたデータを元に構築されており、車両が地磁気に与える特有の磁場変動を捉える仕組みとなっている。本アルゴリズムを実装したワイヤレス地磁気車両センサを用いることで、車両のエンジン部分を確実に捉え、高精度に車両を検知することが可能であり、このセンサを用いることで、適切な混雑状況の提供や空いている駐車ますへの誘導が可能となる。また、本開発では、完全ワイヤレスな据え置きセンサとして実装し、省電力設計を重視してすることで寿命10年を達成した。さらに、駐車場においてはあらゆる車両に踏まれる可能性があるため、耐荷重5 tの筐体設計も実施した。これにより、駐車ますに据え置きで設置し、メンテナンスフリーで運用が可能である。
6.2 今後の取組・展開
完全な自動運転社会に向けた過渡期として必ず訪れる自動運転車両と非自動運転車両が共存する社会において、安心安全を担保するために非自動運転車をインフラ側から検知することが求められる。例えば、駐車場の出入り口付近で駐車場に駐車している車両を自動運転車両の自律走行機能が検知した場合、危険と判断し停車して動けなくなることが考えられる。このような場合に本センサを活用すると進行方向や駐車時間から適切に自動運転車両に駐車車両か走行車両を通知することが可能となる。
さらに、本センサの高い設置性を活かし、駐車場のみならず本線上に配置することで車両台数を計測する交通流計測や、2台のワイヤレス地磁気車両センサを並べ、検知の時間差により進行方向を推定すること、さらには本センサに加速度センサ等新たなセンサモジュールを追加することで、地磁気検出素子の結果をトリガに加速度センサの波形を用いて車種判別を行うことなど、多くの展開を考えていく。これにより、自動運転社会の到来に向けて、インフラ側から有益な情報を走行している車両に提供し、安全な交通社会の実現を目指す。
参考文献
- 1)
- R.Tyburski, "A review of road sensor techno1ogy for monitoring vehic1e traffic", ITE jouma1, voL59, no.8, p27 (1989).
- 2)
- Katsumi Ohashi:"Vehicle Recognition from Parking Images using a Stereo Camera" 4th World Congress on ITS in Berlin(1997).
- 3)
- Katsumi Ohashi, "Development of Silhouette Vision Technique for Vehicle Recognition in Parking Lots", OMRON TECHlNlCS Vol.38 No.4(通巻128号)1998.