
















Development of Stable Microwave Wireless Power Transfer Technology for Wireless Sensor without a Battery
- Directivity control
- Microwave power transfer
- RFID
- Wireless sensor
- Multipath fading
There are two problems that arise of generating more wiring work for sensors with a tooling change in high-mix low-volume production and increasing downtime by breaking. Therefore, the introduction of a wireless interface is considered. There are mainly two types of signal lines and power supply lines in the sensor. The signal lines are wireless according to the communication standard. Although the power supply lines are wireless and use a battery, it is frequently necessary to replace the battery for control application because communication of sensor data is frequent. Thus, a wireless power supply is required without a battery, and the microwave wireless power transfer is an effective option. However, it is difficult to provide stable power because, there are many metal devices and jigs at the production site.
Stable microwave wireless power transfer technology was developed by setting up an antenna array of a power transmitter and applying the maximum ratio combining algorithm. As a result of measuring the received signal strength, the proposed technology was able to confirm a stable power supply compared to conventional technology because the received signal strength had a sufficient margin with respect to the operation threshold of the sensor.
1. Introduction
Currently, most sensors in use at production sites are wire-connected to host devices, such as programmable logic controllers (PLCs). The introduction of wired sensors into production sites poses the two serious challenges described below. With end-user needs diversified in recent years, production lines must be ready for high-mix low-volume production. Hence, layout changes occur frequently. Being wire-connected, many of the existing sensors must undergo frequent layout changes. The first of the two challenges is how to prevent decreases in the production operating rate at such production sites when their layout changes cause increases in the number of person-hours required for rewiring.
Wire breakage may occur because of the excessive load applied to the wiring parts, for example, when installing wired sensors to the moving parts of production equipment. The second of the challenges is how to prevent production line downtime due to wire breakage.
Studies are underway on introducing wireless sensors equipped with a wireless interface as a solution to these challenges1). Sensor wires fall into two types, one being the signal lines used mainly for sensor data exchange and the other being power lines used to feed the power necessary for sensor operation. Wireless signal lines have been partially realized by wireless communication technologies compliant with the communication standards of Wi-Fi and Bluetooth®. Meanwhile, most wireless power lines are realized by the use of battery-powered sensors. In control applications, however, communication occurs frequently, posing the need for frequent battery replacement work and recharging. Besides, the increased number of sensors means an increased number of person-hours required for sensor installation work. What becomes necessary is a technology that can realize wireless sensor power lines without the use of batteries.
Table 1 shows the technologies available for contactless power transfer to devices2). The currently available wireless power transfer systems fall mainly into two categories: the first category is non-radiative systems capable of large power transfer over near distances, and the second is radiative systems capable of small power transfer over far distances. The magnetic-field coupling system and the electric-field coupling system are both non-radiative systems in which the power transfer occurs through an inter-coil magnetic or electric field generated by coils and electrodes both provided on the power transmitting side and the power receiving side. Although large in transfer power, these systems have their own share of challenges: a power transfer distance of 100 mm or less and power transfer efficiency losses due to positional displacements or foreign debris. Meanwhile, the microwave system, the laser system, and the ultrasonic system are each radiative systems in which the power transfer occurs through the electric power conversion of energy received in the form of electromagnetic, laser, or ultrasonic waves emitted into space from the transmitting side. While having a small transfer power of 1 W or less as compared with the non-radiative counterparts, these systems have the advantage of long power transfer distance of 5 m or less. Considering the factory environment in which sensors are to be used, it follows that more than one sensor will be arranged in a range of several meters. Hence, non-radiative power transfer systems are hard to employ because of their short power transfer distance. Even among the radiative systems, the ultrasonic system may be affected by airflows caused by wind, and the laser system has a problem of reduced performance due to losses of light in dusty or oily environments, such as factories.
Hence, the microwave wireless power transfer system seems suitable but has so far received less consideration than it should have because factories are complex radio wave propagation environments full of auxiliary equipment made of metals. Accordingly, this paper considers stable power transfer performance achievable by the microwave system in such environments full of metal-made items as the one described in Chapter 2.
2. Assumed welding process environments
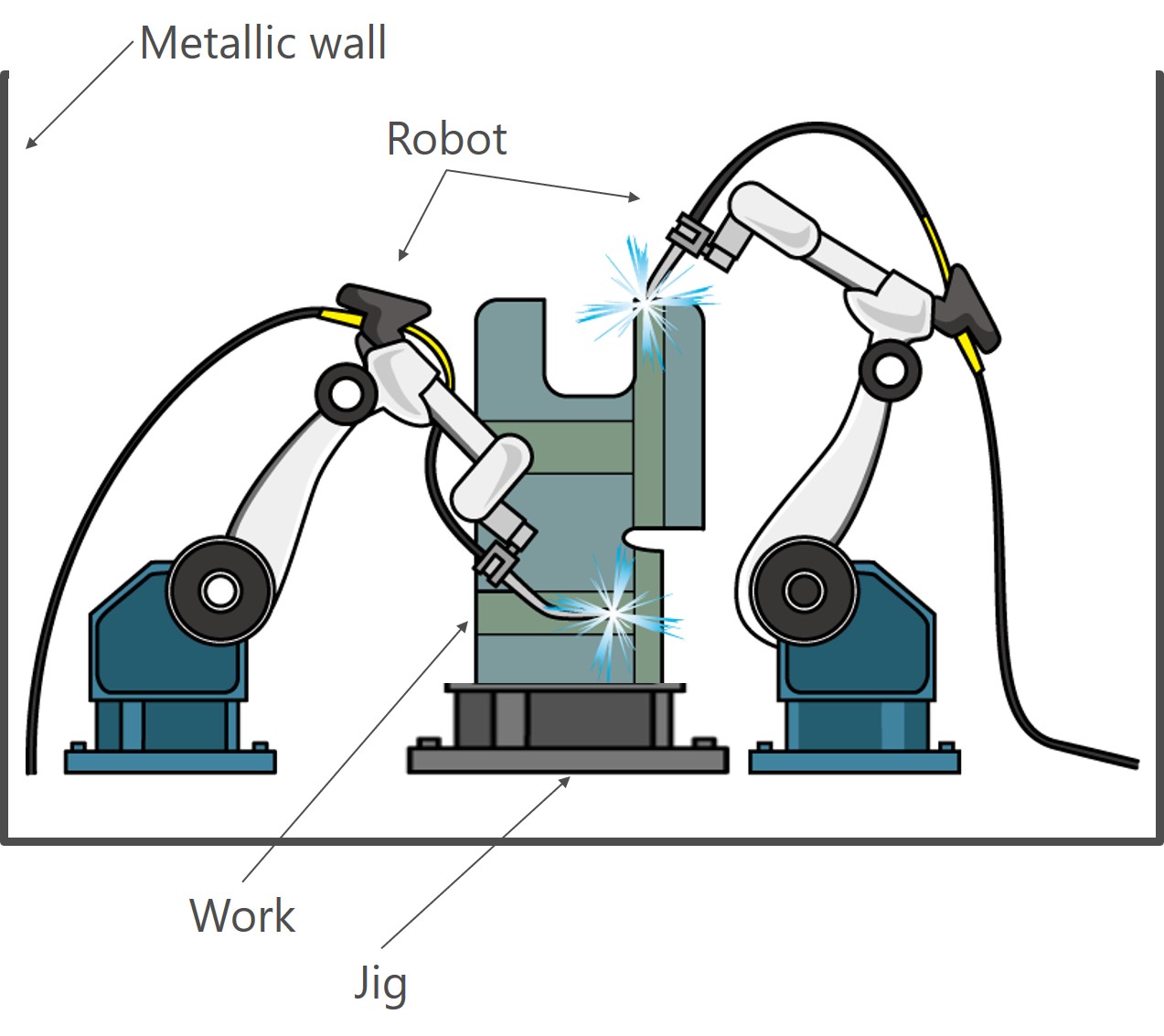
This paper assumes workpiece seating detection in the welding processes for automotive components as the application of wireless sensors. In the welding processes for automotive components, welding spatter poses the problem of burnout of the wiring parts of sensors. Being prone to the type of problems involving wired sensors described in Chapter 1, these environments would receive a high level of positive effects of the solution to the problem and hence are the environments assumed in this paper.
In the welding processes for automotive components, welding robots automatically weld workpieces. Automated robot welding requires workpiece seating detection, which is a sensing process for correct workpiece placement. The reason workpiece seating detection is critical for welding processes is that a weld defect occurs when welding is performed without the workpiece in place.
Typical devices used to detect the seating of workpieces include proximity sensors, photo microsensors, and photoelectric sensors. This paper considers applying microwave wireless power transfer to proximity sensors, which are the most commonly used type of seating detection sensors in the welding processes.
As shown in Fig. 1, the assumed environment consists of four walls, welding robots, a welding jig, and workpieces to be welded. The assumed number of welding robots is two, each of which performs welding on the workpieces. The installed jig is intended to hold a workpiece in place. While an actual welding process environment may have pieces of equipment installed besides those given above, structures sized smaller than an applied wavelength supposedly produce only negligibly small effects because of the nature of radio wave propagation. At 920 MHz, the power transfer frequency under consideration in this paper, the wavelength is approximately 32 cm. Therefore, the pieces of installed equipment assumed for the consideration herein are structures sized equal to or larger than 32 cm.
| Comparison item | Non-radiative | Microwave | Radiative laser | Ultrasonic wave | |
|---|---|---|---|---|---|
| Magnetic-field coupling | Electric-field coupling | ||||
| Transfer power | 100 kW or less | 100 W or less | 1 W or less | 1 W or less | 1 W or less |
| Power transfer distance | 100 mm or less | 10 mm or less | 5 m or less | 10 m or less | 5 m or less |
| Merits | Large power | Large power | • Far distance • Power transferrable to multiple units |
Far distance | • Far distance • Power transferrable to multiple units |
| Demerits | • Near distance • Alignment required | • Near distance • Affected by surrounding metals |
Small power | • Small power • Power not transferrable to multiple units • Performance reduced by dust |
• Small power • Performance reduced by physical fluctuations in environment |
3. Challenges in microwave power transfer
In the microwave system, a power transmitter radiates radio waves through its antenna, and the radio waves are received by each wireless proximity sensor through its antenna and converted into electric power for its operation. Therefore, if sufficiently strong, a received sensor signal can be converted into electric power large enough for stable sensor operation. Too low a received sensor signal strength would cause the sensor to stop operation or to operate unstably. In this paper, the received signal strength sufficient for operation of a wireless proximity sensor is defined as −5 dBm (320 W). This value was determined based on the design value for power consumption by a wireless proximity sensor. Accordingly, the performance verification to be presented herein below assumes that the sensor operates at or above −5 dBm and stops below that.
W). This value was determined based on the design value for power consumption by a wireless proximity sensor. Accordingly, the performance verification to be presented herein below assumes that the sensor operates at or above −5 dBm and stops below that.
In the field of wireless communications, it is known that a received signal strength value may decrease due to the following three factors, depending on the radio wave propagation environment4) :
- 1) Distance attenuation (free space propagation loss)
- 2) Shadowing
- 3) Multipath fading
Attenuation due to distance refers to the path loss at a receiving point, which is proportional to the distance at which a radio wave is emitted from a transmitting point. Radio waves emitted from a transmitting antenna propagate in a spherical form. Hence, their path loss increases in proportion to the distance to the receiving point. This loss also increases with the increase in the power transfer frequency.
A shadowing loss refers to the one caused by blocking objects lying in between a transmitting point and a receiving point. The magnitude of the resulting loss depends on the structural parameters, such as size and material, of the blocking objects. Multipath fading is a type of degradation resulting from the interference between a radio wave reaching the receiving point directly from the transmitting point and other radio waves arriving by reflection or diffraction from surrounding objects. An actual signal loss depends on the relationship between the amplitude and phase of the radio wave arriving directly and those of radio waves arriving by reflection or diffraction.
When a power transmitter and a wireless proximity sensor are installed at a randomly chosen point, respectively, in the assumed environment shown in Fig. 1, the above-mentioned three types of losses will occur. As a result, the received signal strength may be equal to or less than −5 dBm, the threshold operating power for the wireless proximity sensor. Hence, countermeasures must be implemented for the individual factors.
Distance attenuation can be dealt with by defining the distance between the power transmitter and the wireless proximity sensor on the basis of the link design and operating the wireless proximity sensor system within that distance. Shadowing losses can be dealt with by installing the power transmitter and the wireless proximity sensor with no blocking objects coming in between their antennas at the time of system introduction. Multipath fading losses are, however, difficult to deal with based on the layout information of the surrounding objects at the time of installation.
Therefore, for a microwave wireless power transfer technology, the transfer power losses due to the multipath fading caused by the presence of surrounding objects are a problem that needs a technical solution. Chapter 4 presents a stable power transfer technology that can reduce the influence of multipath fading.
4. Stable microwave wireless power transfer technology
4.1 Selection of the algorithm
In a technical solution used for mobile phone base stations, transmitters are equipped with an antenna array consisting of more than one element to control more than one antenna output, thereby reducing multipath fading4)-5). Table 2 shows the control algorithms to be considered in this paper. As shown in Table 2, a selection is to be made by comparison from among the three different types of algorithms6).
An antenna-selection algorithm selects, from among multiple numbers of antennas, one that provides the highest received signal strength to the sensor selected for power transfer. This algorithm switches from one antenna to another to transfer power and to communicate with the sensor. Based on the strength of the signal received then or that of the reply signal from the sensors, the algorithm selects the appropriate antenna. Therefore, the number of antennas must be increased to improve multipath fading immunity. An increased number of antennas, however, lead to a proportional increase in response time.
| Comparison item | Antenna-selection algorithm | Phased-array algorithm | Maximum ratio combination algorithm |
|---|---|---|---|
| Conceptual image | 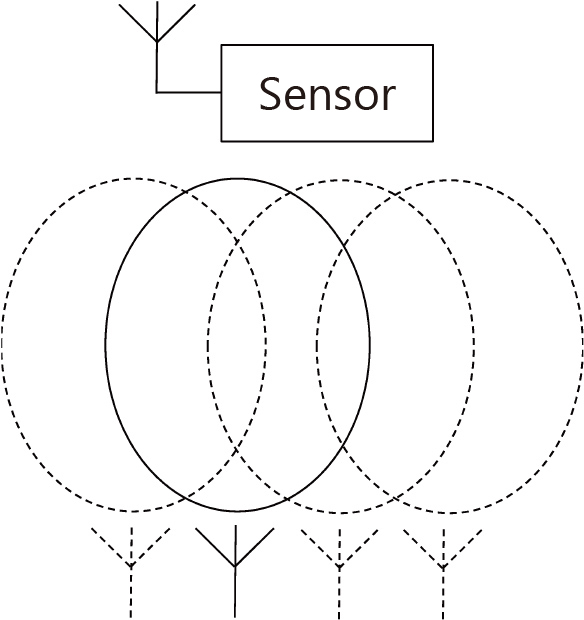 |
 |
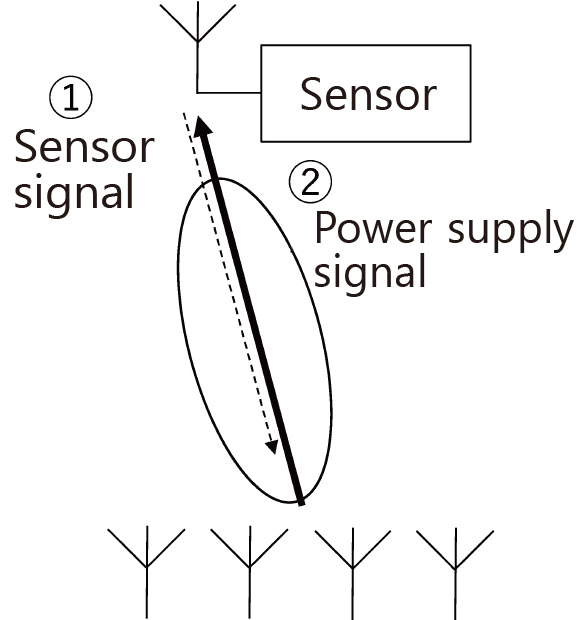 |
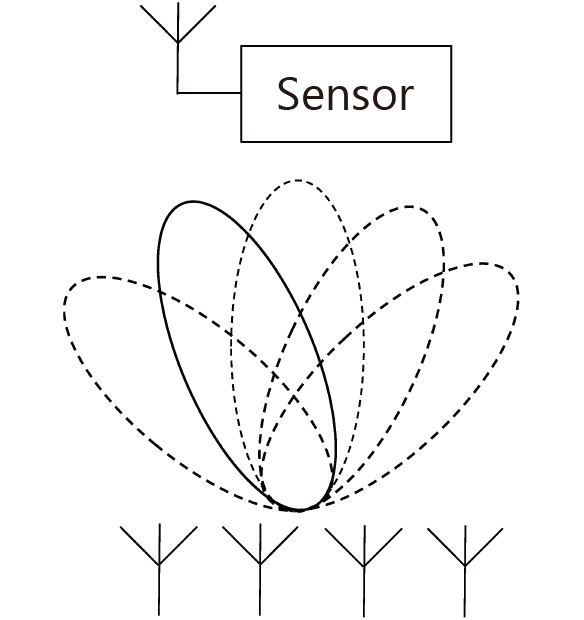
| Principle | The antenna to be selected is the one that provides the highest received signal strength to the sensor. | The phase input to each antenna is controlled to switch between a predetermined number of directivity patterns to select the one that provides the highest received signal strength to the sensor. | The amplitude and phase inputs to each antenna are controlled based on the strength of the signal received from the sensor. |
| Performance | The received signal strength depends on the number or arrangement of the antennas. | The received signal strength depends on the predetermined number of directivity patterns. | The received signal strength can be control optimally. |
| Response time | Increases proportionally to the number of antennas. | Increases proportionally to the number of directivity patterns. | Time per communication session |
A phased-array algorithm controls the phase input to each antenna to switch between antenna directivity patterns for power transfer. Similar to the antenna selection made by the antenna-selection algorithm, this algorithm selects a directivity pattern that provides the highest received signal strength to the sensor. Hence, the response time increases proportionally to the number of directivity patterns.
A maximum ratio combination algorithm controls the amplitude and phase inputs to each antenna based on the strength of the signal received from the sensor. This algorithm can derive an optimal solution for the phase and amplitude inputs to each antenna based on the signal from the sensor and hence has the highest multipath fading immunity among the three types of algorithms. This algorithm requires only a single session of communication with the sensor for amplitude and phase control.
As stable microwave wireless power transfer technology, this paper adopts a maximum ratio combination algorithm, which has a higher multipath fading immunity and a shorter response time than the other two algorithms.
Some investigative attempts have already been made to improve power transfer efficiency with antenna directivity control implemented in the power transmitter for an array antenna set up similarly to this paper7). Yet, with no known example of a field performance demonstration under an actual environment on a wireless power transfer system implemented in a sensor, the feasibility of power transfer efficiency improvement has remained unclear. Accordingly, the next and subsequent sections investigate the applicability of wireless proximity sensor systems to the environments of welding processes for automotive components, using a maximum ratio combination algorithm implemented in a power transmitter.
4.2 Maximum ratio combination algorithm
Fig. 2 shows the system configuration with the maximum ratio combination algorithm applied:
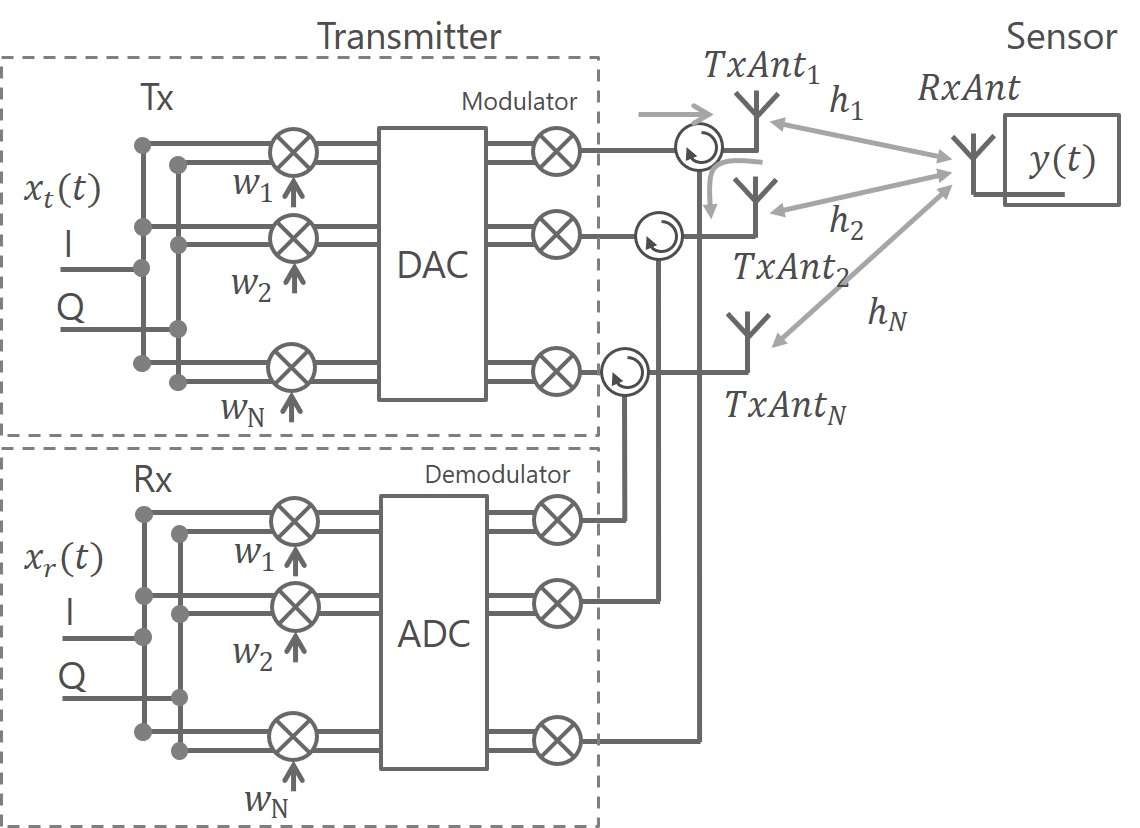
Here,  is the power supply signal input to the antenna,
is the power supply signal input to the antenna,  represents the signal received from the sensor, and
represents the signal received from the sensor, and  denotes the weighting factor applied to control the amplitude and phase inputs of the power supply signal to the antenna. Meanwhile, the propagation channel between the transmitting antenna (
denotes the weighting factor applied to control the amplitude and phase inputs of the power supply signal to the antenna. Meanwhile, the propagation channel between the transmitting antenna ( ) and the receiving antenna (
) and the receiving antenna ( ) is represented as
) is represented as  . All these values are expressed as complex numbers.
. All these values are expressed as complex numbers.
The sensorʼs received signal ( ) can be expressed using the power supply signal
) can be expressed using the power supply signal  , the weight vector
, the weight vector  , and the propagation channel vector
, and the propagation channel vector  . The propagation channel vector
. The propagation channel vector  denotes the information on the amplitude variation and phase rotation of the radio wave combination of both the radio waves arriving directly at the sensor and via reflection from surrounding objects.
denotes the information on the amplitude variation and phase rotation of the radio wave combination of both the radio waves arriving directly at the sensor and via reflection from surrounding objects.

The value of weight vector  to be determined here must be one that maximizes the received signal strength to reduce multipath fading. The received signal power
to be determined here must be one that maximizes the received signal strength to reduce multipath fading. The received signal power  can be obtained using the following equation:
can be obtained using the following equation:
![Py = E[| y(t) | ]](/global/en/assets/img/technology/omrontechnics/vol52/004/img_08.svg)
where  represents the mean calculation. The maximization of equals that of
represents the mean calculation. The maximization of equals that of  . While it suffices to increase the magnitude of the weight vector
. While it suffices to increase the magnitude of the weight vector  infinitely to maximize , such an increase means the infinite increase in the antenna power of the power transmitter. Hence,
infinitely to maximize , such an increase means the infinite increase in the antenna power of the power transmitter. Hence,  is included as a constraint for maximizing without changing the antenna power. Then, it follows that the problem of determining the weight vector W that maximizes becomes the problem of maximizing under the condition of . This problem can be solved using Lagrangeʼs undetermined coefficient as shown below. Assume here that satisfies the equation below. In the following equation, λ is the undetermined coefficient:
is included as a constraint for maximizing without changing the antenna power. Then, it follows that the problem of determining the weight vector W that maximizes becomes the problem of maximizing under the condition of . This problem can be solved using Lagrangeʼs undetermined coefficient as shown below. Assume here that satisfies the equation below. In the following equation, λ is the undetermined coefficient:

When this equation is solved, is obtained as listed below. As shown by the equation, is determined by normalizing the total power of the antennas as the complex conjugate number of the propagation channel to unity:

With the calculated weight vector multiplied on the power supply signal , the power supply signal emitted from each transmitting antenna is combined into the same phase by the sensor antenna via the propagation channel vector . Moreover, because the amplitude ratio of the power supply signal input to each transmitting antenna is proportional to the square of the magnitude of the propagation channel vector , the received signal strength at the sensor antenna can be maximized by emitting a strong signal through the propagation channel with a high signal transfer efficiency3).
4.3 Development of the power transmitter
For this paper, a power transmitter was developed by increasing the number of antennas and that of RF circuits on an OMRON-made UHF band RFID reader/writer to four ( =4), respectively. At the same time, the maximum ratio combination algorithm mentioned in the previous section was implemented in a fieldprogrammable gate array (FPGA).
=4), respectively. At the same time, the maximum ratio combination algorithm mentioned in the previous section was implemented in a fieldprogrammable gate array (FPGA).
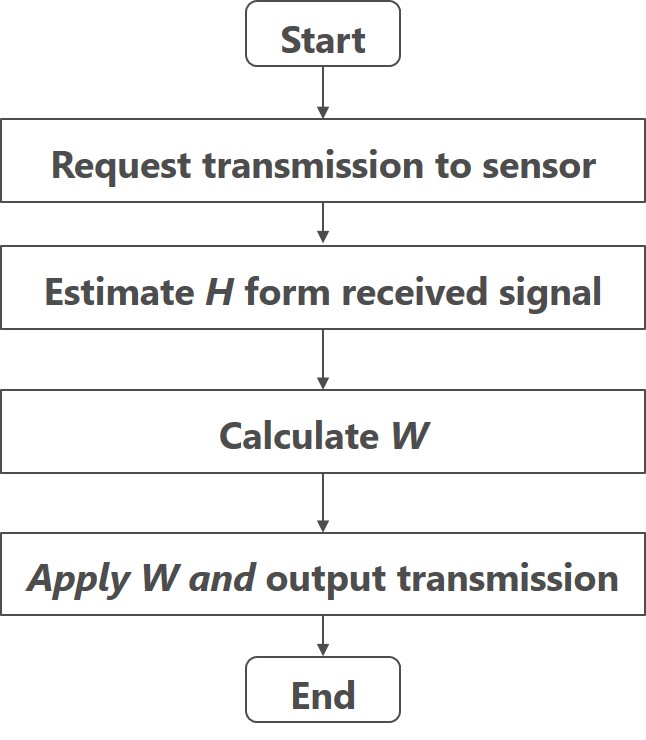
As explained in the previous section, the propagation channel vector between each transmitting antenna and the sensor antenna is necessary for the maximum ratio combination algorithm to determine the weight vector . The algorithm developed this time fast Fourier transforms the IQ waveform of the signal from the sensor to estimate the propagation channel vector . Fig. 3 shows the flow of one cycle of power supply.
5. Performance verification under simulated environment
5.1 Verification method
This chapter reports the results of the verification test of the power transmitter for stable power transfer performance in an environment created as a simulation of the assumed environment shown in Chapter 2. Fig. 4 shows the appearance of the simulated environment. While the assumed environment consists of four walls, welding robots, workpieces, and an installed jig, only the walls were reproduced in this verification because of the constraints on the installation of the antennas for received signal strength measurement.
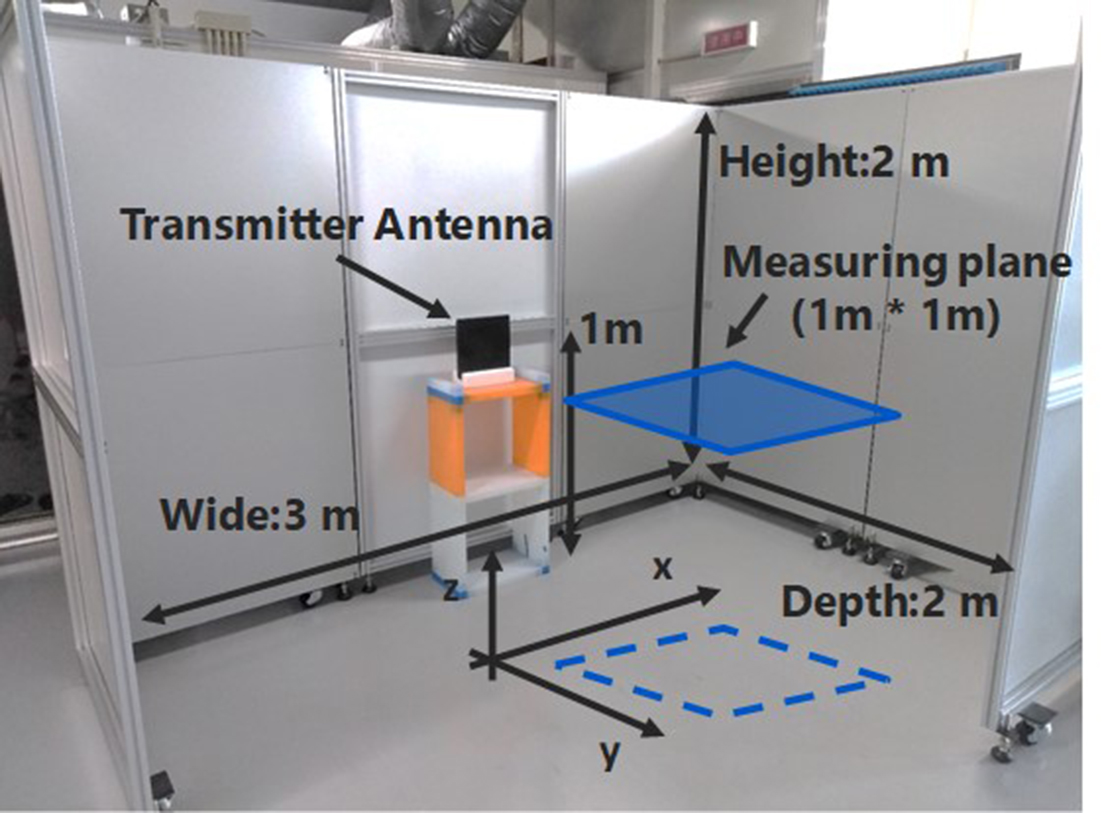
In the simulated environment, the power transmitter antenna was set up in the front-side direction to measure the received signal strength within the one-meter radius after the application of the maximum ratio combination algorithm. Measurements were automatically taken every 4 cm, a one-eighth length of the wavelength, using an electric slider (Misumi: RSB2-LU-C21A-D- F1-R10-2500-S). While the simulated environment had large, highly radio wave reflective metal walls in its horizontal direction, it had an open ceiling in its vertical direction. This meant that multipath fading would occur less in the vertical direction than in the horizontal direction. Therefore, measurements were limited to the horizontal direction. For performance comparison, the received signal strength without the maximum ratio combination algorithm applied was also measured. For the measurement without the algorithm, the weight vector input to the four antennas was fixed to the same amplitude and the same phase as those for the measurement with the algorithm. In this verification, UHF band RFID passive tags were used as the receivers of transferred power. Table 3 shows the test conditions. The power transmitter antenna was designed to 6 dBi so that the effective radiation power would be 36 dBm or less as specified in ARIB T106.
| Center frequency | 916.8 MHz |
|---|---|
| Communication standard | EPC GlobalGen2 for UHF-band RFIDs |
| Antenna power | 30 dBm |
| Power transmitter antenna | Right-handed circular polarization patch antenna |
| Power transmitter antenna gain | 6 dBi |
| Power transmitter antenna array | Half wavelength-spaced flat antenna array |
| RFID tag antenna | Half-wavelength dipole antenna |
| RFID tag antenna gain | 2 dBi |
| Power transmitter height as installed | Approx. 1 m |
| RFID tag height as installed | Approx. 1 m |
| Number of measuring points | 676 points (26 × 26) |
5.2 Verification results
Fig. 5 shows the heat maps for received signal strength with and without the maximum ratio combination algorithm applied.
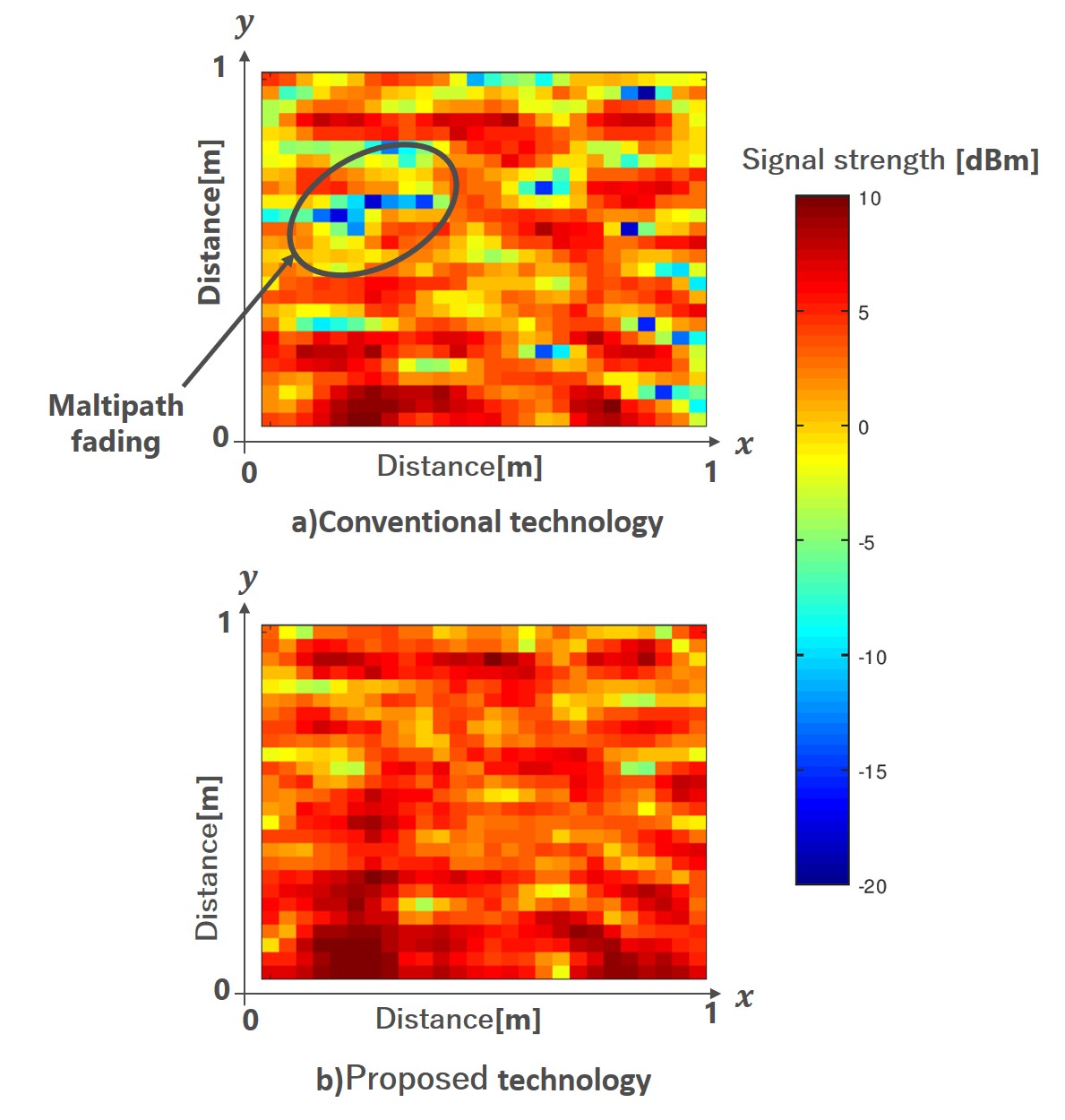
Without the maximum ratio combination algorithm, more than one measuring point registered the received signal strength of −5 dBm or less as shown in Fig. 5.a). Meanwhile, with the maximum ratio combination algorithm, none of the measuring points registered the received signal strength of −5 dBm or less as shown in Fig. 5.b). This difference probably occurred because the received signal strength at the measuring points was reduced by multipath fading with the directivity of the power transmitter antenna fixed in the case without the maximum ratio combination algorithm unlike in the case with it. In the case with the maximum ratio combination algorithm, the algorithm calculated the weight vector for each measuring point and successfully reduced the effect of multipath fading. Fig. 6 shows the cumulative distribution functions for received signal strength with and without the maximum ratio combination algorithm applied.
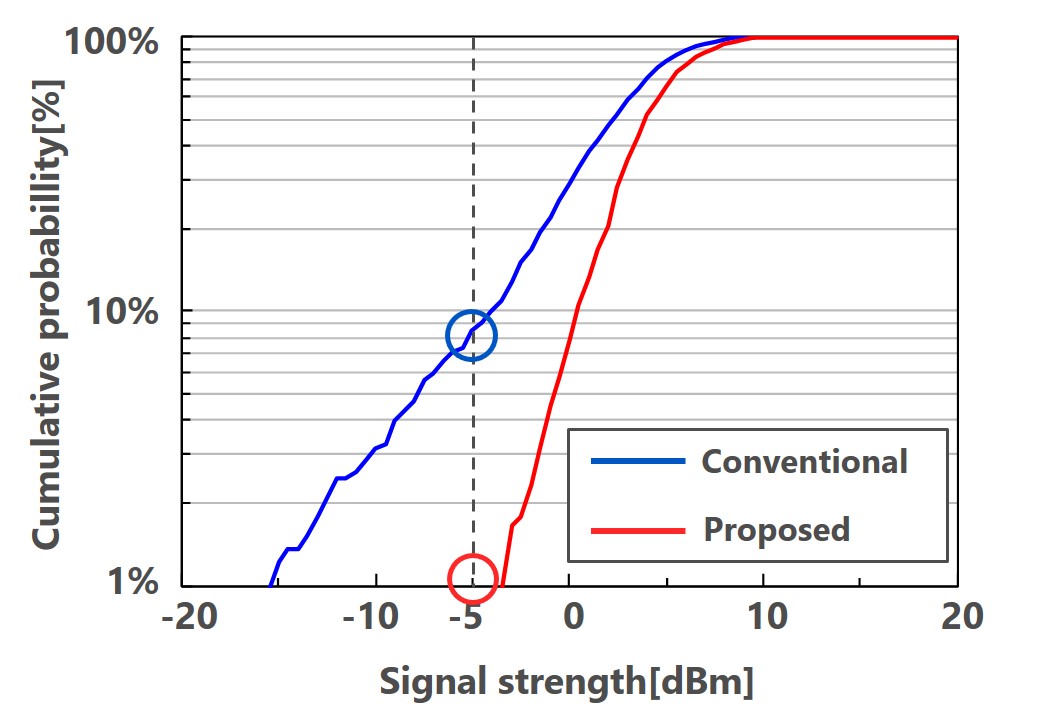
As Fig. 6 shows, whereas the probability for the received signal strength of −5 dBm or less was 7.4% without the maximum ratio combination algorithm, the probability was 0.2% (1/626 points) or less with the maximum ratio combination algorithm because no measuring points registered a received signal strength of −5 dBm or less. This result means that, with the maximum ratio combination algorithm, the sensor would be able to operate even in an environment where it would otherwise fail to operate due to multipath fading with a probability of 7.4%.
6. Conclusions
Assuming workpiece seating detection in the welding processes for automotive components, this paper presented stable microwave wireless power transfer technology for wireless proximity sensors. We demonstrated the advantage of stable power transfer technology by showing that the technology allowed a sensor to operate in a simulated environment where sensors based on conventional microwave power transfer technologies would fail to operate.
The verification test presented above was performed using UHF band RFID passive tags to measure the received signal strength at the measuring points. The environment for the verification test was a simulated one that we built. Therefore, future verification tests should be performed using actual wireless proximity sensors to demonstrate their applicability to workpiece seating detection during the operation of actual welding processes for automotive components.
The target of the development presented in this paper was wireless proximity sensors. Our stable microwave wireless power transfer technology can be applied to sensors other than proximity sensors, such as vibration sensors and temperature sensors. With a view to horizontal deployment to a wide variety of sensors, we intend to conduct additional verification tests with changes to the required transfer power fixed at −5 dBmd for this paper and under environments other than four-walled environments.
Finally, we would like to cordially thank Dr. YAMADA Hiroyoshi, professor at the Faculty of Engineering, Niigata University, for the support he extended to the development presented herein.
References
- 1)
- I. Satoko, “Promotion of Narrow Space Wireless Project” (in Japanese), http://www.soumu.go.jp/main_sosiki/joho_tsusin/policyreports/joho_tsusin/gijutsusenryaku/02tsushin03_04000245.html, (accessed Jan. 11, 2019).
- 2)
- T. Shunsuke, “Technical Overview of Wireless Power Transfer” (in Japanese), Tokugikonshi, Vol. 279, pp. 3-14, 2017.
- 3)
- T. Junichi, “Basic Theory of Radiowave Propagation” (in Japanese), in Proc. 2005 Microwave Workshops & Exhibition, 2005, https://www.apmc-mwe.org/mwe2005/src/TL/TL05-01.pdf, (accessed Jan. 11, 2019).
- 4)
- The Institute of Electronics, Information and Communication Engineers (IEICE), Antenna Engineering Handbook (in Japanese), Ohmsha, p. 1098, 2019.
- 5)
- R. O. Schmidt, “Multiple Emitter Location and Signal Parameter Estimation”, IEEE Transactions on antennas and propagation, Vol. 34, No. 3, pp. 276-280, 1986.
- 6)
- D. G. Brennan, “Linear Diversity Combining Techniques”, Proceedings of the IRE, Vol. 47, No. 6, pp. 1075-1102, 1959.
- 7)
- M. Kentaro, “Per-Antenna Power Constraint for Fast Power Transfer to Multi-Sensor Devices and Spatio-Temporal Beam Forming Algorithm Compatible with Rectifier Non-Linearity” (in Japanese), Proceedings of the IEICE Society Conference 2018, Vol. B-21-21, p. 466, 2018.
The names of products in the text may be trademarks of each company.
“Wi-Fi” is a registered trademark of the Wi-Fi Alliance.
“Bluetooth®” is a trademark or a registered trademark of Bluetooth SIG, Inc. USA.