
















Dynamics simulation technology for high electrical durability relay
- High electrical durability relay
- Dynamics simulation technology
- Electrical durability design
- Electromagnetic analysis
- Eco-friendly equipment
Recently energy efficiency improvement of electrical equipment is promoted as environmental issues. This trend also accelerates both downsizing and switching capability for mechanical relays. We need to control contact dynamics and erosion process from arc plasma triggered by contact switching, and design electrical durability of mechanical relays.
There in this time, we developed numerical analysis approach to design contact switching dynamics and improve electrical durability of mechanical relays. We quantified contact switching dynamics by numerical coupled analysis between electromagnetism and dynamics of electronic magnet. We could improve contact velocity 3 times and electrical durability.
1. Introduction
In recent eco-friendly equipment such as hybrid electric vehicles and solar panels, direct current is adopted because they use batteries. The electrical voltage and current in these equipment are increasing in pursuit of energy efficiency. These eco-friendly equipment have mechanical relays to open and close the electrical circuit. The mechanical relays used for these applications are required to interrupt high-voltage and high-current without fail.
Generally, in order to interrupt direct-current electricity using an electrical contact (hereinafter referred to as a “contact”) like a mechanical relay and switch, it is important to shorten the duration of arc discharge which is generated when the contact is opened. This is because arc discharge, which is put into a hightemperature state by Joule heating 1) 2), could erode the contact surface and deform the parts around the contact, leading to the failure of the relay or switch. Therefore, when interrupting direct current using a contact, it is necessary to shorten the arc discharge duration by increasing the contact opening speed and ensuring contact separation in a short time 3).
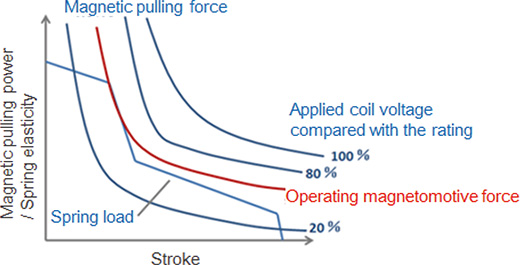
A single stable relay, which is the basic form of relay, is designed to close a contact pair using the magnetic pulling force of the electromagnet to which voltage is applied and to open it using the spring action when the voltage is turned off from the electromagnet (hereinafter referred to as “spring load”). Therefore, the balance between the magnetic pulling force of the electromagnet relative to its stroke and the spring action are the basics of relay design. Fig. 1 shows the schematic diagram of the magnetic pulling force relative to the stroke of the electromagnet and the spring load. This figure shows when the coil voltage that makes the magnetic pulling force exceed the spring load curve throughout the entire stroke is applied, then the electromagnet operates 3). The design elements of a magnetic pulling force curve are coil winding, the structure and material of the electromagnet that is composed of magnetic materials, and those of a spring load curve are the working range of the contact and spring constant. These elements were combined in the operational design to perform the opening/closing functions. This figure shows the balance between the electromagnet and the spring and is based on static operational design (hereinafter referred to as “static design”).
For the interruption of direct current, ensuring contact separation in a short time through quick contact opening operation is required. In short, a transient behavior design (hereinafter referred to as “dynamic design”) is required for the contact opening operation. However, since dynamic design requires many more parameters than static design, the establishment of a theoretical method was delayed. Therefore, conventional dynamic behavior design was conducted mainly based on prototyping and actual measurement verification. Since actual measurement verification requires prototype evaluation, there is a problem in that the development lead time becomes long. Therefore, we attempted to optimize the contact opening operation dynamically by utilizing CAE.
2. Test sample and evaluation index
2.1 Outline of test sample
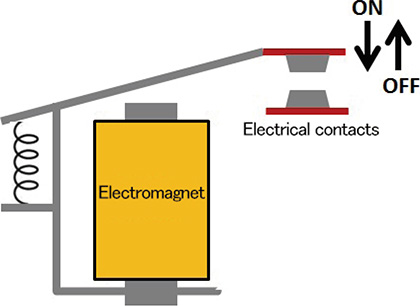
In order to clarify the design target of the contact opening operation in implementing CAE, we developed a relay principle model to conduct an electrical durability test. Fig. 2 shows the schematic diagram of the relay principle model. The principle model used in this study has a relay structure consisting only of a coil spring, which makes it easy to evaluate the spring load. In addition, it is also designed to connect the moving contact directly to the moving part of the hinge-type electromagnet so that the moving part of the electromagnet and the moving contact operate simultaneously.
2.2 Technical issues associated with increase in load capacity
Using the relay principle model shown in Fig. 2, we conducted an electrical durability test under the load condition of 440 V/60 A. The relay principle model could be switched 2,000 times when a diode for surge absorption was connected to the electromagnetic coil, and switched 50,000 times when a diode for surge absorption was not connected. Fig. 3 shows the coil drive circuit diagram.
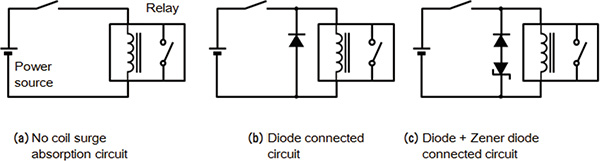
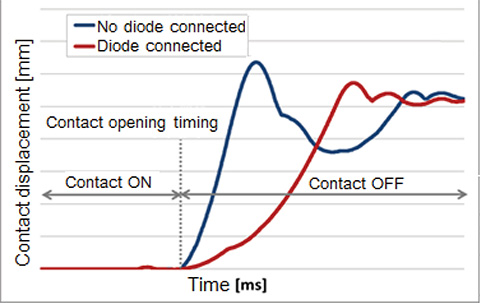
In the case of (b) of Fig. 3 where the diode for surge absorption is connected to the electromagnetic coil in parallel, an induced electromotive force associated with a change in coil current is generated when the switch is turned off. We considered that this applies induced current between the coil and diode, and the maintained magnetic pulling force reduces the contact opening speed. Therefore, focusing on the correlation between the difference in the contact opening speed and the switching performance owing to the presence/absence of diode connection, we conducted a comparative evaluation of transient contact operation measured with a high-speed camera at the time of opening of the contact based on the presence/absence of diode connection. Fig. 4 shows the result of the actual measurement evaluation of transient contact operation at the time of opening of the contact. As evidenced by the tilt of the contact displacement shown in Fig. 4, the contact speed at the time of opening of the contact is reduced when the diode for surge absorption is connected. Comparing the average contact speed for 10 ms from the contact opening timing at which the contact started to be displaced, the average speed was about four times higher when the diode was not connected than when it was connected.
For these reasons, it is important to quantify the balance between transient spring load and magnetic pulling force for dynamic design to optimize the contact opening speed.
2.3 Hypothesis on adhesion failure mechanism and evaluation index
In order to evaluate the correlation between the contact opening speed and the electrical durability described in Section 2.2, we prepared several samples, in which the contact opening speed was intentionally adjusted by using/not using the diode for surge absorption as well as connecting the Zener diode, to conduct the evaluation of the switching times in the electrical durability test and the contact opening speed using these samples. Fig. 5 shows the correlation between the contact opening speed and the switching times in the electrical durability test.
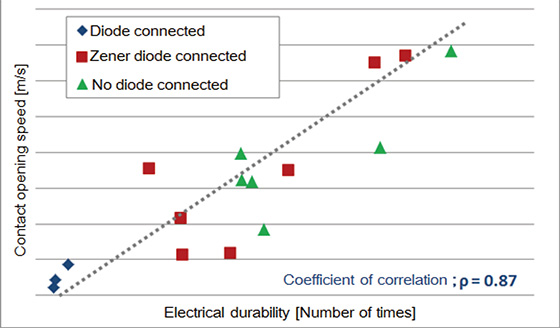
From the graph in Fig. 5, we can see that there is a very high correlation between the contact opening speed and the switching times in the electrical durability test, as the coefficient of correlation was 0.87. The switching life in the electrical durability test shown in Fig. 5 is due to the contact adhesion attributable to the erosion of the contact caused by arc discharge which is generated at the time of opening of the contact. Contact adhesion is a phenomenon where the contacts melted by arc discharge and sticking each other by solidify again. It is considered that if the contact opening speed is reduced and it takes time to ensure contact separation, the duration of arc discharge increases and contact erosion and adhesion tend to occur. Therefore, it is considered that increasing the contact opening speed enables the reduction of the frequency of contact adhesion failure.
For these reasons, we introduce the contact opening speed as an evaluation index for shortening the arc duration and suppressing the contact erosion to optimize the contact opening speed through CAE.
3. Details of analysis
3.1 Three-dimensional CAD model of the test sample
Fig. 6 shows the three-dimensional CAD model of the electromagnet which was used in the relay principle model.
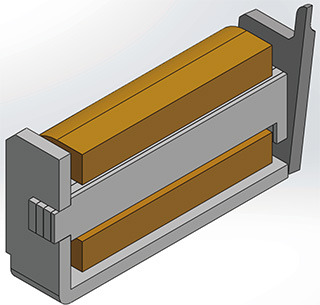
We created this model of the electromagnet which was used in the relay principle model shown in Fig. 2 using a threedimensional CAD software Solid Works. Since the electromagnet model we used this time had a symmetric structure, we cut it in half on the symmetric face for the purpose of reducing the calculation cost. In addition, based on the premise that the electromagnet behaves in collaboration with the contact, we adopted the method of estimating the contact opening speed from the transient electromagnet behavior calculated through CAE.
3.2 Study of the contact opening speed through electromagnetic analysis
3.2.1. Analysis model
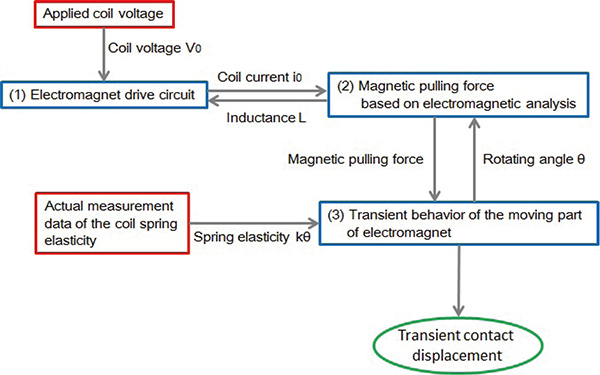
We calculated the transient behavior of the principle model shown in Fig. 6 based on electromagnetic analysis. Fig. 7 shows the flow of the calculation of this electromagnetic analysis model. In this electromagnetic analysis, we conducted the coupled analysis of the (1) Electromagnet drive circuit, (2) Magnetic pulling force of the electromagnet and (3) Transient behavior of the moving part of the electromagnet to calculate the electromagnet behavior.
- [1]
- Electromagnet drive circuit
Based on the inductance L which was calculated in the magnetic field analysis on the electromagnet, the electric current i applied to the electromagnet coil is calculated using the equation (1).-
 (1)
(1)
-
 : Coil voltage
: Coil voltage
-
 : Coil inductance
: Coil inductance
-
 : Coil current
: Coil current
-
 : Coil resistance
: Coil resistance
-
- [2]
- Magnetic pulling force of the electromagnet
Based on the coil current i derived from the equation (1), the vector potential A, the magnetic flux density B and the Magnetic pulling force FM generated by the moving part of the electromagnet could be calculated using the equation (2). Since a change in the magnetic flux density occurs transiently this time, we conducted magnetic field analysis considering the generation of the eddy current which inhibits the transient change in magnetic flux density 4).-
 (2)
(2)
-
 : Magnetic pulling force of the electromagnet
: Magnetic pulling force of the electromagnet
-
 : Space permeability
: Space permeability
-
 : Magnetic flux density
: Magnetic flux density
-
 : Vector potential
: Vector potential
-
- [3]
- Transient behavior of the moving part of the electromagnet
Since the behavior of the moving part of the hinge-type electromagnet used as a relay principle model can be regarded as a rotary movement, the magnetic pulling force FM calculated using the equation (2) is inserted into the motion equation (3) to calculate the displacement amount θ of the moving part of the electromagnet at each clock time. The spring constant k used in the equation (3) was calculated based on the relationship between the spring elasticity which was measured with a load measuring instrument in advance and the displacement amount.-
 (3)
(3)
-
 : Inertia moment
: Inertia moment
-
 : Rotation angle of the electromagnetic metal piece
: Rotation angle of the electromagnetic metal piece
-
 : Damping constant
: Damping constant
-
 : Spring constant
: Spring constant
-
In order to estimate the transient behavior of the contact, the calculations (1) to (3) are performed repeatedly at each clock time to determine the displacement of the moving part of the electromagnet .
3.2.2 Analysis result
We calculated the transient behavior of the moving part of the electromagnet using the analysis model described in 3.2.1 to attempt to estimate the contact opening speed. Fig. 8 shows the graph showing the behavior of the moving part of the electromagnet obtained through electromagnet behavior analysis, as well as the contour figure of the magnetic flux density distribution of the electromagnet based on typical displacement. The contact opening timing was estimated from the displacement starting position of the electromagnetic metal piece, which was analytically calculated, as well as the actual relay dimensions, on the premise that the moving part of the electromagnet behaves in collaboration with the metallic contact.
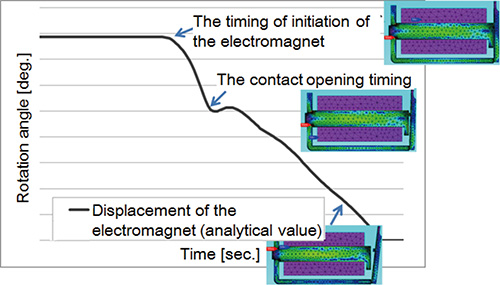
(Contour figure: Magnetic flux density distribution)
3.2.3 Evaluation method
We calculated the average speed for 10 ms from the standard position as the contact opening speed. The contact opening timing estimated from the analysis of the transient behavior of the electromagnet moving part shown in Fig. 8 was used as a standard. To analyze the spring load condition under which the highest contact opening speed could be obtained, we changed only the magnitude of the spring constant, but not the material and shape of the electromagnet. Since the transient behavior of the contact is determined by the total force of the magnetic pulling force of the electromagnet and the spring elasticity, we considered that increasing the spring elasticity basically enables higher contact opening speed to be achieved. So we set a larger spring constant and used the analytical model described in 3.2.1 to calculate the contact opening speed. In addition, we also quantified the relationship among the contact opening speed, the spring elasticity and the magnetic pulling force of the electromagnet.
3.3 Comparison with actual equipment
In order to evaluate the accuracy of analysis result, we compared the magnitude of the magnetic pulling force at each displacement of the moving part of the electromagnet between the actual measurement value and the analytical value. Fig. 9 shows the result of comparing the magnetic pulling force between the actual measurement value and the analytical value, in which the solid line and the dot sequence show the experimental value and the analytical value, respectively. The dotted frame in Fig. 8 shows the position where the moving part of the electromagnet adsorbed onto the iron core completely. An analytical error of up to approximately 5% was observed at the complete pulling position, but after the moving part started moving, an analytical error of far less than 1% was ensured. This is considered to be because the difference in other micro-magnetic gap dimensions at the junction of magnetic members, etc., between the actual equipment and the model cannot be ignored in the case of complete pulling, relative to the micro-magnetic gap of the adsorption surface. In this study on the contact opening speed, since we used the analytical data of the moving part of the electromagnet in the range where the analytical error of the magnetic pulling force is less than 1%, we considered that sufficient analysis accuracy could be ensured.
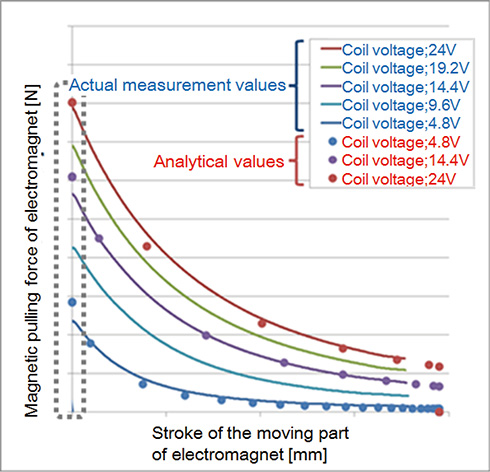
between actual measurement value and analytical value
Fig. 10 shows the result of analyzing the contact opening speed under the conditions of connecting a surge absorbing element to the coil drive circuit as well as three types of spring constants. The analytical and actual measurement values of the contact opening speed are displayed as bar charts, and the magnetic pulling force and spring elasticity at the time of opening of the contact are displayed as line charts. Compared to cases where the diode for surge absorption was connected, we can see the magnetic pulling force at the time of opening of the contact was smaller when the Zener diode was connected as well as when no diode was connected.
When a diode is connected, a short circuit is formed between the coil and the diode when the switch for relay control is turned off , as Fig. 3 (b) shows. In this case, an induced electromotive force V of the coil as shown in the equation (4) is generated in the short circuit, and induced current is applied to the coil for a certain period of time. This prevents a reduction in the magnetic pulling force and increases the magnetic pulling force at the time of opening of the contact.
-
 (4)
(4)
-
 : Induced electromotive force
: Induced electromotive force
-
 : Inductance
: Inductance
As the magnetic pulling force increases, the contact opening power expressed in the equation (5) decreases, leading to a reduction in the contact opening speed.
-
 (5)
(5)
-
 : Contact opening force
: Contact opening force
-
 : Spring elasticity
: Spring elasticity
-
 : Magnetic pulling force
: Magnetic pulling force
For these reasons, the contact opening speed can be increased if no diode is connected. However, since diodes are required in terms of the protection of electronic devices from surge noise, we would like to study the improvement of the contact opening speed under the condition of connecting a diode.
From the equation (5), it can be expected that increasing the spring elasticity improves the contact opening power and the contact opening speed. Generally, the spring constant increase leads to the spring elasticity increase. However, as Fig. 10 shows, we found that an increase in the spring elasticity causes an increase in the magnetic pulling force, too.
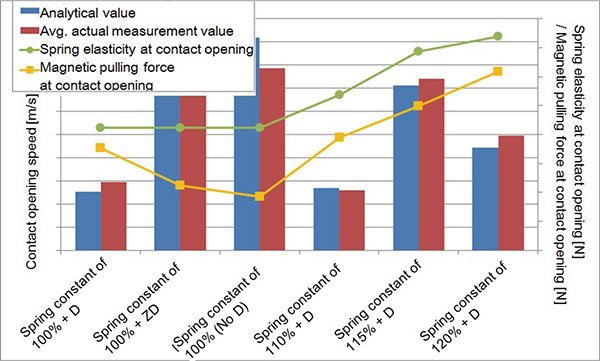
(Bar chart: Contact opening speed, Line chart: Magnetic pulling force and spring elasticity)
Fig. 11 shows the result of analyzing the coil current at the time of opening of the contact. The arrows in the figure show the timing of when the moving part of the electromagnet starts to move. Increasing the spring constant and elasticity advances the timing of when the electromagnet moving part starts to move. Since this increases the coil current at the timing of when the electromagnet moving part and the contact start to move, the magnetic pulling force at the time of opening of the contact also increases.
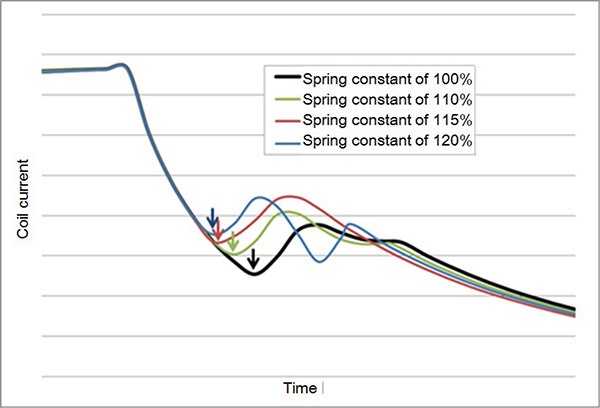
For these reasons, although increasing the spring constant increases the spring elasticity, the magnetic pulling force of the electromagnet also increases. As a result, the contact opening speed is locally maximized as shown in Fig. 10.
4. Application to prototypes
We made a prototype for the purpose of improving the switching life in the electrical durability test. The spring constant which enables the highest contact opening speed to be achieved was determined by reference to the contact opening speed analysis result shown in Fig. 10. Table 1 shows the comparison of switching performance between the relay principle model and the prototype with improved contact opening speed we made this time. Compared to the principle model used as a standard, this prototype achieved three times higher contact opening speed as well as approximately 25 times longer switching life in the electrical durability test under the load condition of 440 V/60 A.
| Load condition | Representative opening speed value [m/s] | Representative electrical durability value [No. of times] | |
|---|---|---|---|
| Principle model | A diode is connected | 0.15 | 2,000 |
| Principle model | A diode is not connected | 0.48 | 50,000 |
| Prototype | A diode is connected | 0.45 | 50,000 |
In this study, in order to control the transient behavior of the contact, we only optimized the spring constant for the purpose of increasing the spring elasticity. However, optimizing the magnetic properties of the electromagnet leads to reduction in the magnetic pulling force at the time of opening of the contact. So the magnetic properties of the electromagnet can also be a factor for controlling the transient behavior of the contact. Using the method in this study that combines the magnetic field analysis with dynamic behavior analysis, the magnetic properties of the electromagnet could be optimized.
5. Summary
In a direct current relay, the duration of arc discharge needs to be reduced in order to reduce the erosion and adhesion of the contact. To reduce the duration of arc discharge, it is important to increase the contact opening speed to ensure contact separation in a short time.
For the purpose of increasing the contact opening speed, we attempted to quantify the transient behavior at the time of opening of the contact through the coupled analysis on magnetic field and motion. We found that increasing the spring constant of the relay principle model increased both the spring elasticity and the magnetic pulling force of the electromagnet as well as locally maximized the contact opening speed.
The electrical durability test was performed using the prototype whose spring constant was changed to maximize the contact opening speed. As a result, its switching life was approximately 25 times longer than that of the principle model used as a standard. This is considered to be because an increase in the contact opening speed suppressed the erosion and adhesion of the contact.
Our future challenge is to apply the method of quantifying the transient behavior of contact we implemented in this study through CAE to more complicated actual relay structures. Although the moving part of the electromagnet behaves in collaboration with the contact in the relay principle model, they don’t behave in complete collaboration with each other in actual relays. This is attributable to the occurrence of a difference in the transient behavior between the electromagnet and the contact, owing to the deflection of the moving part of the contact which is generated at the time of contact opening operation. Although we dealt with motions regarding the entire model as a rigid body, in order to simulate the transient behavior of an actual relay, it is necessary to develop a calculation model considering the deflection of the moving part of the contact. We are planning to build a technology for analyzing the behavior of the entire relay considering the deflection to contribute to improving the switching life of actual relays.
References
- 1)
- Institute of Electrical Engineers of Japan Discharge Handbook Publication Committee, Discharge handbook. IEEJ, 2003, 1945 p.
- 2)
- Fei Yang et al., Low-voltage circuit breaker arcs – simulation and measurements, 2013 IOP Publishing Ltd Journal of Physics D: Applied Physics, Vol. 46, 2013.
- 3)
- Mano,Kunio.; Relay handbook. MORIKITA PUBLISHING Co., Ltd., 1992, 335 p.
- 4)
- Kawase, J.; Kikuchi, H.; Ito, S. Three Dimensional Numerical Analysis for Transient Dynamic Properties of Direct Current Electromagnet. IEEJ B, 1991, Vol. 111, No. 10, p. 1051-1056, doi:10.1541/ieejpes1990.111.10_1051.
The names of products in the text may be trademarks of each company.