














電池不要なワイヤレスセンサ向けマイクロ波安定給電技術の開発
- 指向性制御技術
- マイクロ波給電
- RFID
- ワイヤレスセンサ
- マルチパスフェージング
多品種少量生産に伴う段取り替え時のセンサの配線工数と、センサ配線の断線によるダウンタイムの増加が、生
産現場において問題となっている。そのため、配線の必要のない無線によるインターフェース(I/F)の導入が検討
されている。センサの配線には主に信号と電源の2種類が存在し、信号は通信規格に準拠した方式により一部無線
化が実現されている。一方、電源に対しては電池を用いたものもあるが、制御用途での使用を考えた場合、通信の
頻度が多く、頻繁に電池交換が必要となる。したがって、電池を用いない電源の無線化が求められており、マイク
ロ波方式でのワイヤレス給電が有効である。しかし、生産現場は金属の装置や、冶具が多く、安定した電力供給が
困難である。
著者らは、マイクロ波方式において給電装置のアレイアンテナにより最大比合成方式を用いて、センサへの給電
電力を安定させる制御技術を開発した。そして、給電電力を測定した結果、従来の制御を用いない場合と比較して、
開発した制御技術によりセンサの動作閾値に対して高い受信信号強度であったことから、安定した給電を確認できた。
1.まえがき
現状、生産現場に導入されているセンサはPLC(Programmable Logic Controller)などの上位機器と有線で接続されていることがほとんどである。有線センサを生産現場に導入する場合では主に以下の2点が課題となっている。
近年エンドユーザニーズの多様化に呼応し、生産ラインには多品種少量生産への対応が要求される。そのため、レイアウト変更が頻繁に行われているが、多くのセンサが有線での接続のため、レイアウト変更が頻繁に必要となる。1つ目の課題は、そのような生産現場においてレイアウト変更に伴って、配線の変更に必要な工数が増加し、生産稼働率の低下を防止する事である。
生産設備の可動部への有線センサの取り付けなど、配線部分に負荷がかかる場合に断線が発生する。2つ目の課題は、断線により生産ラインが停止するダウンタイムの発生を防止することである。
それらの課題を解決するために、センサI/Fが無線化された、ワイヤレスセンサの導入が検討されている1)。センサ配線には、主にセンサデータをやり取りする信号線と、センサが動作するために必要な電力を供給する電源線の2種類が存在する。信号線の無線化は、Wi-FiやBluetooth®などの通信規格に準拠した無線通信によって一部実現されている。電源線においてはセンサに電池を搭載することで無線化されているものがほとんどである。しかし、制御用途では通信頻度が多く、頻繁な電池の交換作業や充電が必要となる問題がある。また、センサの数が増加するに伴い、その作業の工数は増加する。したがって、電池を用いることなくセンサの電源線を無線化できる技術が必要とされている。
非接触でデバイスに電力を供給する技術には複数の方式があり、それを表1に示す2)。現在のワイヤレス給電方式は近距離で大電力を給電できる非放射型と、遠距離に小電力を給電できる放射型の大きく2種類に分類できる。非放射型である磁界結合方式と電界結合方式は給電側と受電側それぞれでコイルや電極を設け、コイル間の磁界や電界を利用して給電する方式である。これらの方式は給電電力が大きい一方で、給電距離が100mm以下であること、位置ずれや異物による給電効率の低下が課題とされている。それに対して、放射型であるマイクロ波方式、レーザ方式、超音波方式では送信側が空間にそれぞれ電磁波、レーザ、超音波を放射し、受信したエネルギを電力に変換することで給電する方式である。給電電力は非放射型に比べて1W以下と小さいが、給電距離が5m以下と長距離なのが特徴である。工場内でのセンサの使用状態を考えた場合、数mの範囲に複数のセンサを配置することが想定されるため、給電距離の短い非放射型の給電方式の適用は困難である。また、放射型においても超音波方式では風などの空気の流れの影響を受けること、また、レーザ方式では工場のような埃や油が多い環境では光が遮断され、性能が劣化する問題点がある。
そのため、マイクロ波方式によるワイヤレス給電が適していると考えるが、工場内は周辺装置が金属により構成される複雑な電波伝搬環境であることから、従来検討されることが少なかった。そこで、本論文では2章で示す金属物が多い環境において、マイクロ波方式による安定給電性能についての検討を行う。
2. 想定する溶接工程環境
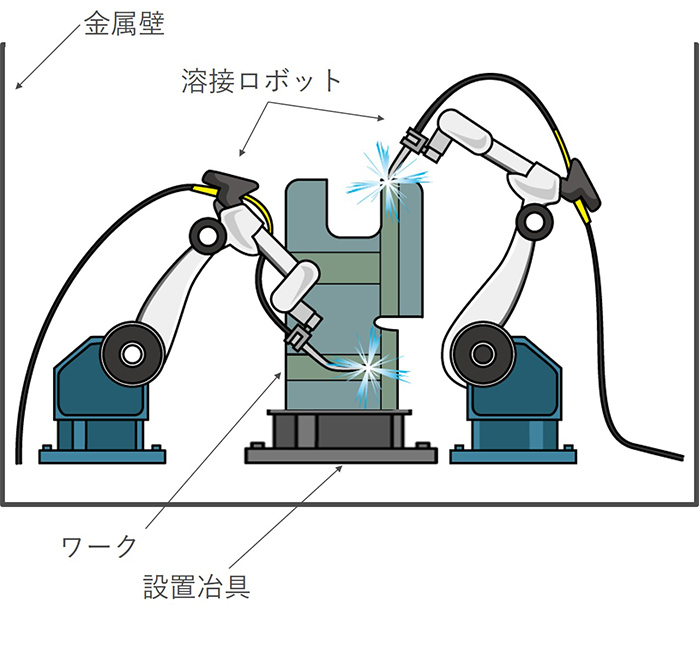
本論文ではワイヤレスセンサのアプリケーションとして、自動車部品の溶接工程でのワークの着座検知を想定する。自動車部品の溶接工程では溶接時に発生するスパッタによるセンサの配線部分が焼き切れる問題がある。1章で述べた有線センサによって発生する問題が存在する環境であり、問題を解決した場合の効果が大きいことから本論文の想定環境とした。
自動車部品の溶接工程では、溶接ロボットによりワークの溶接が自動で行われる。ロボットにより溶接を自動で行うためにはワークが所定の位置に搬入されたかをセンシングする着座検知が行われる。決められた位置にワークが無い状態で溶接すると溶接の不良が発生するため、溶接工程において着座検知は重要である。
着座検知のためのセンサには近接センサ、フォトマイクロセンサ、光電センサなどが用いられている。溶接工程においては近接センサが最も多く用いられていることから、近接センサに対してマイクロ波ワイヤレス給電の適用を検討する。
図1に示される通り想定環境内には、壁面が4面と溶接対象のワーク、溶接ロボット、溶接冶具が存在する。溶接ロボットは2台を想定しており、それぞれがワークの溶接を行う。設置冶具はワークを固定しておくためのものである。実際の溶接工程の環境では、上記の設置物以外も存在するが、電波伝搬の特性では波長より小さい構造物の影響は小さいとされている。本論文で検討する給電周波数である920MHzの波長は約32cmのため、それ以上の大きさの構造物を想定して設置物を検討した。
| 比較項目 | 非放射型放射型 | 放射型 | |||
|---|---|---|---|---|---|
| 磁界結合 | 電界結合 | マイクロ波 | レーザ | 超音波 | |
| 給電電力 | 100kW以下 | 100W以下 | 1W以下 | 1W以下 | 1W以下 |
| 給電距離 | 100mm以下 | 10mm以下 | 5m以下 | 10m以下 | 5m以下 |
| メリット | 大電力 | 大電力 | 遠距離、複数に給電可能 | 遠距離 | 遠距離、複数に給電可能 |
| デメリット | 近距離、 要位置合わせ |
近距離、 周辺金属に影響 |
小電力 | 小電力、 複数に給電不可、埃による性能劣化 |
小電力、 環境の物理変動で性能劣化 |
3.マイクロ波給電における課題
マイクロ波方式では給電装置のアンテナから電波を放射し、ワイヤレス近接センサではアンテナで受信した電波を電力に変換し、センサを動作させる。したがって、センサで受信した信号強度が大きければ、変換される電力が大きく、センサが安定して動作するが、センサの受信信号が小さければセンサが停止又は不安定動作となる。本論文ではワイヤレス近接センサが動作できる受信信号の大きさは-5dBm(320 W)とする。これはワイヤレス近接センサの消費電力の設計値から算出された値である。そのため、-5dBm以上であればセンサが動作し、それ以下であればセンサが停止することを想定し検証を行う。
W)とする。これはワイヤレス近接センサの消費電力の設計値から算出された値である。そのため、-5dBm以上であればセンサが動作し、それ以下であればセンサが停止することを想定し検証を行う。
無線通信の分野において電波の伝搬環境によって受信信号を低下させる要因は以下の3つとされている4)。
- 1)
- 距離減衰(自由空間伝搬損失)
- 2)
- シャドウイング
- 3)
- マルチパスフェージング
距離による減衰は、送信点から電波を放射した際の距離に応じた受信点での損失を意味する。電波は送信アンテナから放射されると球面状に伝搬される。したがって、受信点までの距離が大きくなるに伴い、損失が大きくなる。また、給電周波数が高くなるに伴い損失が大きくなる。
シャドウイングは、送信点から受信点までの間に遮蔽物が存在する場合に発生する損失を意味する。発生する損失の大きさは遮蔽物の大きさや物質などの構造に依存する。
マルチパスフェージングは送信点から受信点まで直接到来する電波と、周辺物体に反射や回折して到来する複数の電波が干渉することで発生する損失を意味する。発生する損失は直接到来する電波と、反射や回折して到来する電波のそれぞれの振幅と位相の関係に依存する。
図1で示した想定環境において給電装置とワイヤレス近接センサを任意の場所に設置した場合、上記の3つの損失が発生する。それにより、受信信号強度がワイヤレス近接センサの動作電力の閾値である-5dBm以下となる場合がある。そのため、それぞれの要因に対して対策が必要である。
距離減衰に対しては給電装置とワイヤレス近接センサとの間の距離を回線設計から定義し、定義した距離の範囲でワイヤレス近接センサのシステムを運用することで対策できる。シャドウイングに対してはシステムを導入する際に給電装置のアンテナとワイヤレス近接センサのアンテナとの間に遮蔽物が存在しないように設置することで対策できる。しかし、マルチパスフェージングに対しては周辺物体の配置の情報から損失を設置時に対策することは困難である。
したがって、マイクロ波ワイヤレス給電技術においては周辺物体の存在により発生するマルチパスフェージングによる給電電力の低下が課題となり、技術的な対策が必要となる。4章ではマルチパスフェージングの影響を低減する安定給電技術について述べる。
4.マイクロ波安定給電技術
4.1 アルゴリズム選定
携帯電話の基地局で、送信機に複数のアンテナで構成されたアレイアンテナを設け、複数のアンテナの出力を制御させることでマルチパスフェージングを低減する技術が用いられている4)-5)。本論文で検討する制御アルゴリズムを表2に示す。表2に示される通り、3 種類のアルゴリズムを比較選定する6)。
アンテナ選択方式は複数のアンテナの中でセンサに対して受信信号が最も大きくなるアンテナを選択して給電する方式である。各アンテナを切り替えながらセンサに給電と通信を行い、その時の受信信号やセンサからの返信信号を基にアンテナを選択する。そのため、マルチパスフェージング低減性能を向上させるためには、アンテナ数を増やす必要があるが、アンテナの数だけ応答時間が増加する。
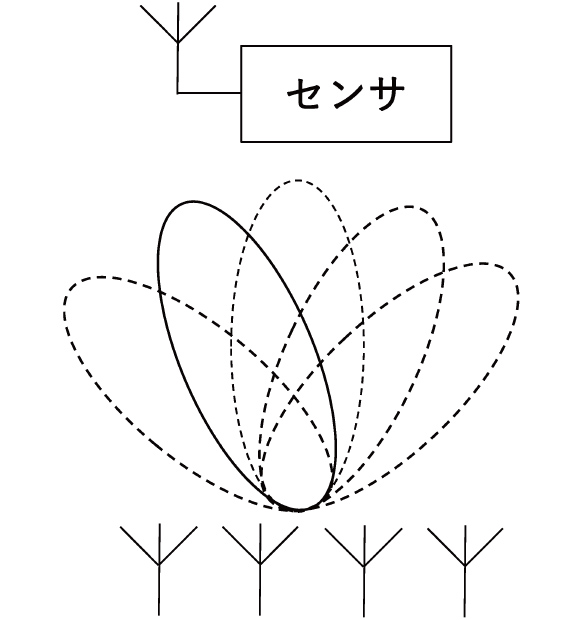
フェーズドアレイ方式は各アンテナに入力される位相を制御することで指向性を切り替えて給電する方式である。アンテナ選択方式と同様にセンサの受信信号強度が最も高くなる指向性を選択する。したがって、指向性の数だけ応答時間が増加する。
最大比合成方式は各アンテナで受信したセンサからの信号を基に、各アンテナに入力される振幅と位相を制御する方式である。センサからの信号を基に各アンテナに入力する位相と振幅の最適解を導出できるため、マルチパスフェージング低減性能は3つのアルゴリズムの中で最も高い。また、1回のセンサとの通信で制御可能である。
本論文ではマルチパスフェージング低減性能が最も高く、応答時間が他の方式より短い最大比合成方式をマイクロ波安定給電技術として適用する。
| 比較項目 | アンテナ選択方式 | フェーズドアレイ方式 | 最大比合成方式 |
|---|---|---|---|
| イメージ | 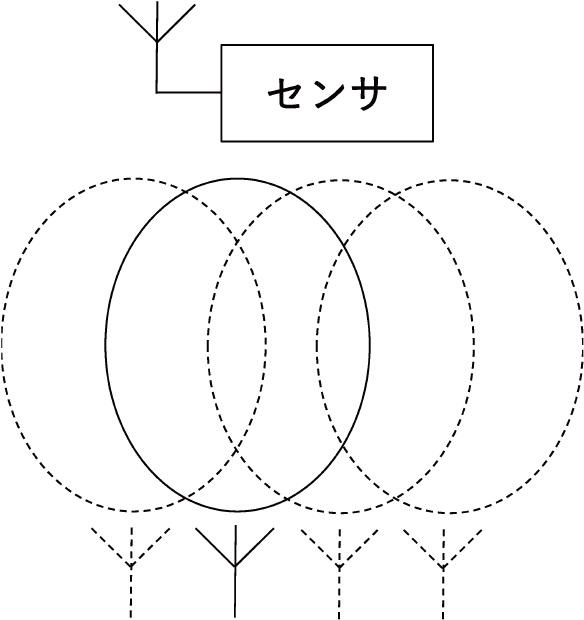 |
 |
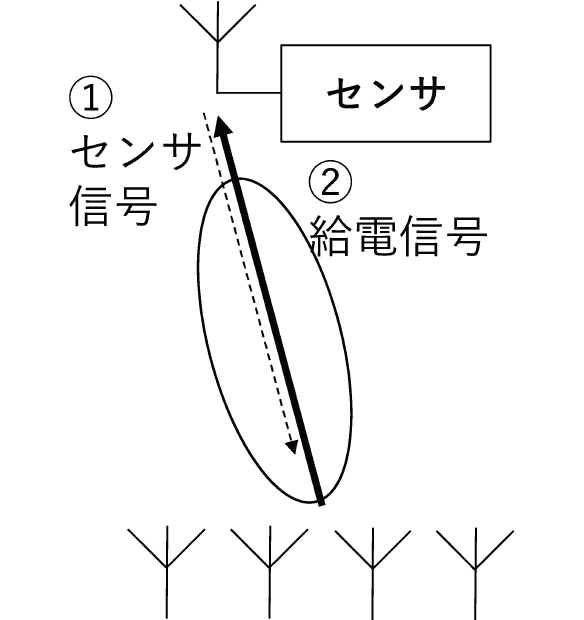 |
| 原理 | センサに対の受信信号強度が大きくなるアンテナを選択 | 各アンテナに入力される位相を制御し、指向性をあらかじめ決められたパターンだけ切り替えて、センサの受信信号強度が大きくなる指向性を選択 | センサからの受信信号を基に各アンテナに入力される振幅と位相を制御 |
| 性能 | 受信信号はアンテナ数や配置に依存 | 受信信号は決められた複数の指向性パターンに依存 | 受信信号を最適値に制御できる |
| 応答時間 | アンテナの数に比例して増大 | 指向性の数に比例して増大 | 1回の通信時間分 |
従来は本論文と同様にアレイアンテナを設け、アンテナの指向性制御を給電装置に実装し、給電効率を向上させる検討がされている7)。しかし、ワイヤレス給電システムをセンサに対して導入し、実環境で特性を確認した例はなく、その実現可能性について明らかにされていない。そのため次節以降で給電装置に最大比合成方式を実装し、自動車部品溶接工程環境へのワイヤレス近接センサシステムの適用可能性を検証する。
4.2 最大比合成方式
図2に最大比合成方式を適用した際のシステム構成を示す。
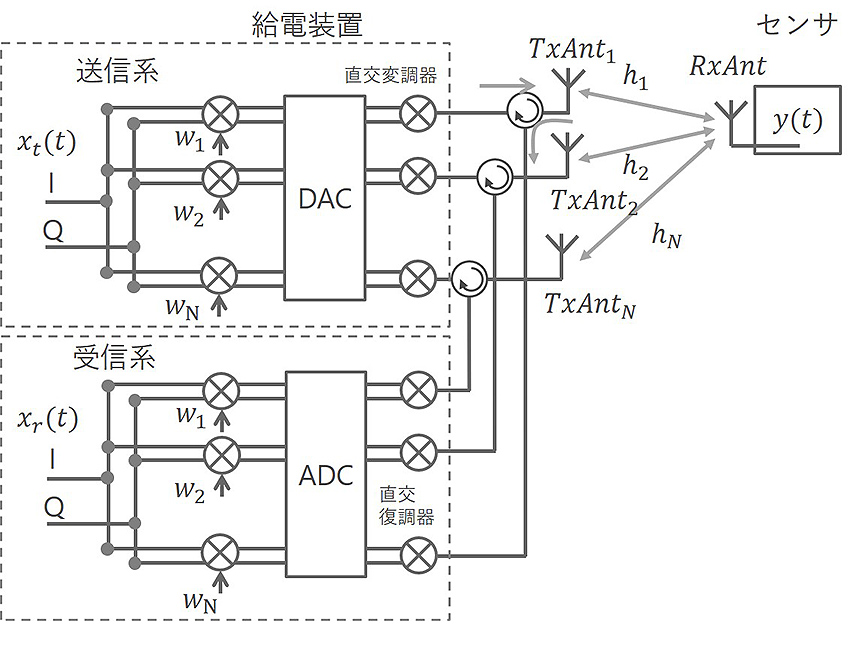
 はアンテナに入力される給電信号である。
はアンテナに入力される給電信号である。 はセンサからの受信信号である。
はセンサからの受信信号である。
 はアンテナに入力される給電信号の振幅と位相を制御するために乗算される重みである。また、送信アンテナ(
はアンテナに入力される給電信号の振幅と位相を制御するために乗算される重みである。また、送信アンテナ( )と受信アンテナ(
)と受信アンテナ( )間の伝搬チャネルを
)間の伝搬チャネルを とする。これらは複素数で表される。
とする。これらは複素数で表される。
センサでの受信信号( )は、給電信号
)は、給電信号 、重みベクトル
、重みベクトル
 、伝搬チャネルベクトル
、伝搬チャネルベクトル
 を使って表現できる。伝搬チャネルベクトル
を使って表現できる。伝搬チャネルベクトル はセンサに直接到来する電波と周辺物体に反射して到来する電波の両方が合成された電波の振幅変動と位相回転の情報を意味する。
はセンサに直接到来する電波と周辺物体に反射して到来する電波の両方が合成された電波の振幅変動と位相回転の情報を意味する。

ここで、マルチパスフェージングを低減させるためには受信信号の値が最大となる重みベクトル を求めることになる。受信信号の電力
を求めることになる。受信信号の電力 を次式で求めることができる。
を次式で求めることができる。
![Py = E[| y(t) | ]](/jp/ja/assets/img/technology/omrontechnics/20191227/20191227-052-004-fig-08.svg)
ここで は平均計算である。を最大にするということは
は平均計算である。を最大にするということは を最大化させることに等しい。しかし、を最大化させるためには、重みベクトルの大きさ
を最大化させることに等しい。しかし、を最大化させるためには、重みベクトルの大きさ を無限に大きくすれば良いが、それは給電装置の空中線電力を無限に大きくすることと等価になる。したがって、空中線電力を変えずにを最大化させるために制約条件として
を無限に大きくすれば良いが、それは給電装置の空中線電力を無限に大きくすることと等価になる。したがって、空中線電力を変えずにを最大化させるために制約条件として を加える。したがって、を最大にする重みベクトルを求める問題は
の条件下でを最大化する問題となり、この問題を以下のようにLagrangeの未定型数を用いて解くことができる。は以下の方程式を満たすものであるとする。次式の中のλは未定係数である。
を加える。したがって、を最大にする重みベクトルを求める問題は
の条件下でを最大化する問題となり、この問題を以下のようにLagrangeの未定型数を用いて解くことができる。は以下の方程式を満たすものであるとする。次式の中のλは未定係数である。

上記の方程式を解いては次のように求まる。式で示される通り、は伝搬チャネルの複素共役を各アンテナの電力の合計を1に正規化することで算出される。

算出された重みベクトルを給電信号に乗算することで、各送信アンテナから放射された給電信号が伝搬チャネルベクトルを介してセンサのアンテナにより同相で合成される。また、各送信アンテナに入力される給電信号の振幅比は伝搬チャネルベクトルの大きさの2乗に比例することから、信号が大きく伝わる伝搬チャネルに大きな信号を放射することで、センサのアンテナでの受信信号強度を最大化することができる3)。
4.3 給電装置の開発
本論文では弊社製UHF帯RFIDのリーダライタをベースにアンテナ及びRF回路を4つに増設して開発を行った( =4)。また、前節で述べた最大比合成方式のアルゴリズムはFPGA(Field Programmable Gate Array)に実装する。
=4)。また、前節で述べた最大比合成方式のアルゴリズムはFPGA(Field Programmable Gate Array)に実装する。
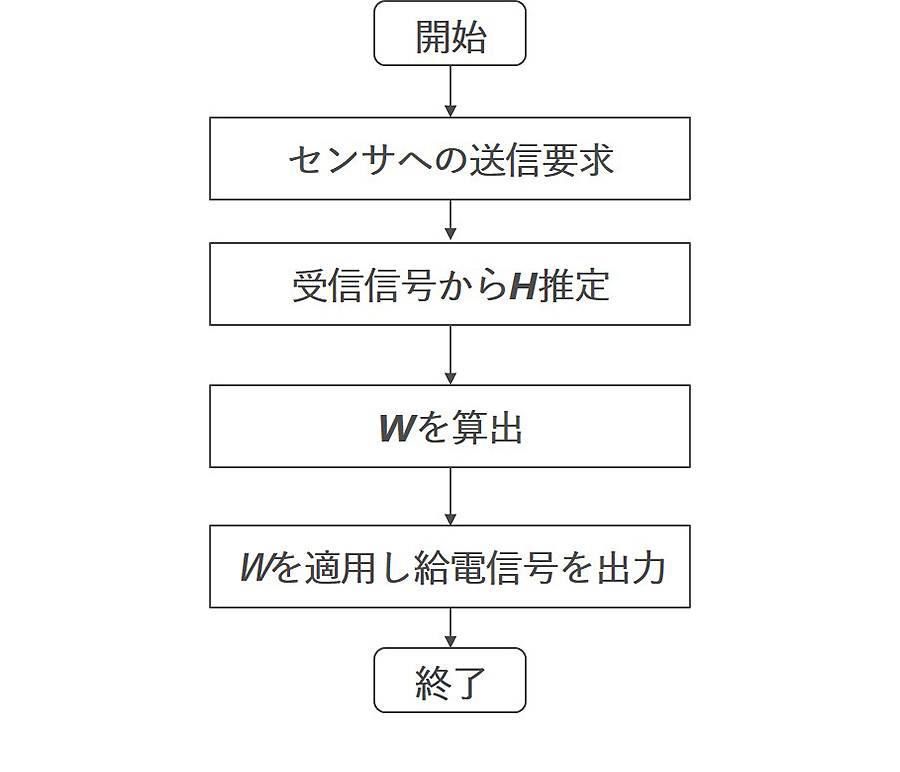
前節で述べた通り、最大比合成方式で重みベクトルを計算する場合、各送信アンテナとセンサのアンテナの間
の伝搬チャネルベクトルが必要である。本開発ではセンサからの信号のIQ波形を高速フーリエ変換することで、
伝搬チャネルベクトルを推定する。給電の1サイクルのフローを図3に示す。
5. 模擬環境での性能検証
5.1 検証方法
本章では2章で示した想定環境を模擬した環境を作成し、その環境における安定給電性能の検証結果を報告する。模擬環境の外観を図4に示す。
想定環境では壁面、溶接ロボット、ワーク、設置冶具が環境に設置されていたが、本検証では受信信号強度の測定用のアンテナ設置の制約上、壁面のみの再現とする。
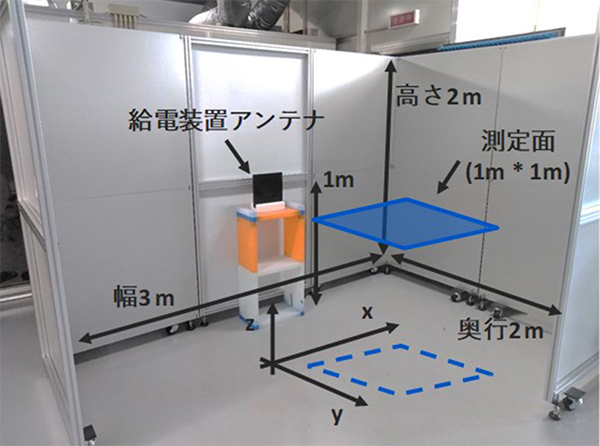
模擬環境において給電装置のアンテナを正面方向に設置し、最大比合成方式適用後の1m四方の範囲の受信信号強度を測定する。測定は波長の1/8の長さである4cmごとに電動スライダ(MISUMI社製、RSB2-LU-C21A-D-F1-R10-2500-S)を用いて自動で行う。水平方向は電波の反射が大きい金属壁で覆われているのに対して、垂直方向は天井が解放されていることからマルチパスフェージングの発生が水平方向に比べ小さいことが予想される。そのため、水平方向のみの測定とした。また、性能を比較するために最大比合成方式を適用しない場合の受信信号強度も測定する。適用しない場合は、4つのアンテナへ入力する重みベクトルは同振幅、同位相に固定する。本検証の給電対象にはUHF帯RFIDパッシブタグを用いる。条件を表3に示す。給電装置の送信アンテナはARIB T106で定められた実効放射電力36dBm以下となるよう6dBiに設計した。
| 中心周波数 | 916.8MHz |
|---|---|
| 通信規格 | UHF 帯RFID EPC Global Gen2 |
| 空中線電力 | 30dBm |
| 給電装置アンテナ | 右旋円偏波パッチアンテナ |
| 給電装置アンテナ利得 | 6dBi |
| 給電装置アンテナ配置 | 半波長間隔平面配置 |
| RFIDタグアンテナ | 半波長ダイポールアンテナ |
| RFIDタグアンテナ利得 | 2dBi |
| 給電装置設置高さ | 約1m |
| RFIDタグ設置高さ | 約1m |
| 測定点数 | 676点(26点×26点) |
5.2 検証結果
図5 に最大比合成方式を適用しない場合と、適用する場合の受信信号強度のヒートマップを示す。
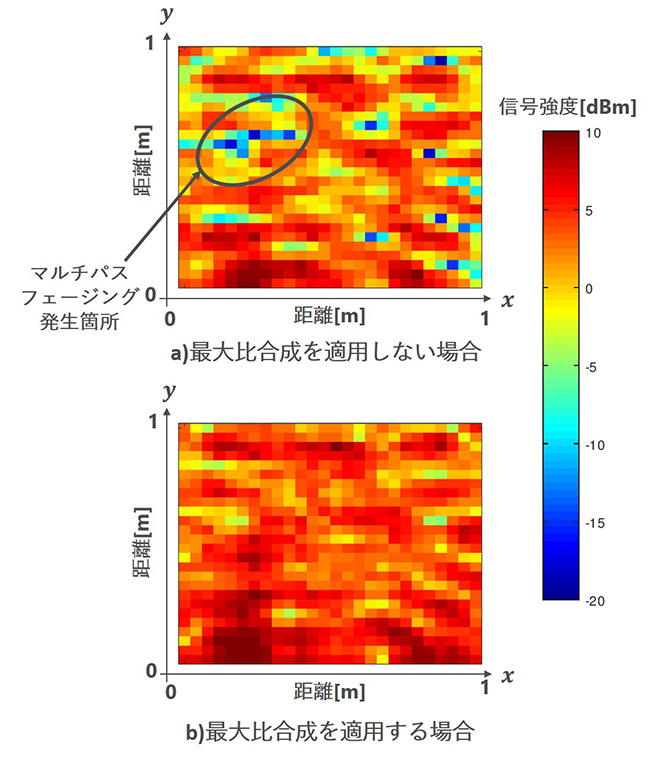
図5のa)に示される通り、最大比合成方式を適用しない場合では受信信号強度が-5dBm以下となる測定点が複数箇所で確認できる。それに対して、図5のb)に示される通り、最大比合成方式を適用する場合では、-5dBm以下となる測定点は確認できない。これは、最大比合成方式を適用しない場合では、給電装置のアンテナの指向性が固定であるため、マルチパスフェージングにより測定点での受信信号強度が減少していると考えられる。それに対して、最大比合成方式を適用する場合では、測定点毎に重みベクトルを計算することでマルチパスフェージングの
影響を低減できている。
図6に最大比合成方式を適用した場合としない場合の受信信号強度の累積分布関数を示す。
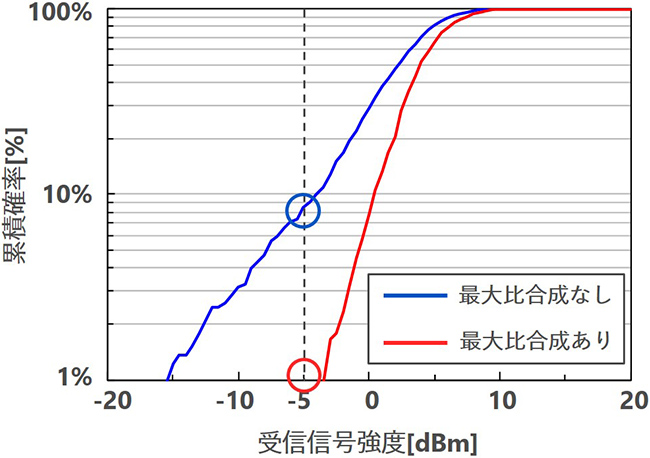
図6に示される通り、最大比合成方式を適用しない場合は、受信信号強度が-5dBm以下となる確率が7.4%であるが、最大比合成方式を適用した場合では-5dBm以下となる測定点が存在しないことから、確率は0.2%(1/626点)以下であることが確認できる。これは、マルチパスフェージングにより7.4%の確率でセンサが動作不可となる環境において、最大比合成を適用することで動作不可であった場所でもセンサの動作が可能となることを意味する。
6. むすび
本論文では自動車部品の溶接工程のワーク着座検知を想定し、ワイヤレス近接センサへのマイクロ波ワイヤレス安定給電技術について述べた。模擬環境において従来のマイクロ波給電技術ではセンサが動作できない場所に対して、安定給電技術によりセンサが動作可能となり、本技術の有効性を示した。
今回は測定点での信号強度の測定のためUHF帯RFIDパッシブタグを用いて検証を行った。また、検証した環境も弊社で構築した模擬環境であった。そのため、今後は実際のワイヤレス近接センサを用いて、稼働中の自動車部品溶接工程にてワークの着座検知の検証に取り組む必要がある。
本論文ではワイヤレス近接センサをターゲットとして開発を行った。マイクロ波安定給電技術は近接センサ以外の振動センサや温度センサなどにも適用できる。今後これらの様々な種類のセンサへの展開を考え、本論文では-5dBmに設定した給電に必要な電力を変化させた場合と、壁面が4面存在する環境以外の場合の検証も行う。
最後に、今回開発にあたり多大なご支援をいただいた新潟大学工学部教授山田寛喜先生に深く感謝申し上げる。
参考文献
- 1)
- 板谷聡子. “狭空間ワイヤレスプロジェクトの推進”.総務省.2017-2-27.http://www.soumu.go.jp/main_sosiki/joho_tsusin/policyreports/joho_tsusin/gijutsusenryaku/02tsushin03_04000245.html,(accessed 2019-1-11).
- 2)
- 高橋俊輔.ワイヤレス給電の技術概要.特技懇.2017,Vol.279, p.3-14
- 3)
- 高田潤一.“電波伝搬の基礎理論”.2005 Microwave Workshops& Exhibition (MWE 2005).2007-2.https://www.apmc-mwe.org/mwe2005/src/TL/TL05-01.pdf,(accessed 2019-1-11).
- 4)
- 電子情報通信学会.アンテナ工学ハンドブック.オーム社,2019, 1098p.
- 5)
- R. O. Schmidt. Multiple Emitter Location and Signal Parameter Estimation. IEEE Transactions on antennas and propagation. 1986, Vol.34, No.3, p.276-280.
- 6)
- D. G. Brennan. Linear Diversity Combining Techniques. Proceedings of the IRE. 1959, Vol.47, No.6, p.1075-1102.
- 7)
- 村田健太郎.“マルチセンサデバイス高速給電のための素子電力制約および整流器非線形性対応時空間ビームフォーミングアルゴリズム”.2018年電子情報通信学会ソサエティ大会講演論文集.2018, Vol.B-21-21, p.466.
本文に掲載の商品の名称は、各社が商標としている場合があります。
「Wi-Fi」は Wi-Fi Allianceの登録商標です。
「Bluetooth®」はBluetooth SIG, Inc. USA の商標または登録商標です。