














電動機運転状態における絶縁抵抗計測技術
- 電動機
- 保全
- 絶縁抵抗
- 微小漏洩電流
- インバータ駆動電動機の漏洩電流


生産現場において、設備の安定稼働は重要な要素の一つであり、稼働を維持するためには計画的、かつ的確なタイミングでの保全が重要になる。
保全現場においては、保全員が定期的に工場内を巡回し保守点検しているが、近年は人手不足・技術者不足により計画的な保全活動を継続することが難しくなっている。そのため、設備の突発停止による機会損失が増大するとともに、保全員は復旧対応(事後保全)に注力しなければならず、人員不足に拍車をかけている。従って、設備の状態監視による保全(予防保全)への転換が求められている。
この状況で、著者らは、動力源として多種多様な設備に用いられており保守点検の対象となっている電動機に着目し、「モータ状態監視機器K6CM シリーズ」を開発した。これは、電動機の振動、温度、電流、絶縁抵抗の状態を監視可能としたもので、それぞれの機器を組み合わせることで、電動機の故障要因を包括的に捉えられる。
本稿では、状態監視項目の一つである絶縁抵抗について、従来の計測手法では運転状態にて測定が困難であったインバータ駆動される電動機の状態監視に求められる計測手法について記す。
1. まえがき
1.1 電動機の保守点検における現状と課題
生産設備を安定して稼働させるため、その動力源である低圧誘導電動機(以下、電動機)は、保全現場において重要な保守点検の対象である。保守点検には、毎日行う日常点検、1〜2ヶ月に一度の定期点検、1〜2年に一度の分解点検があり、点検項目も多岐に渡る 1)。
しかし、24時間連続稼働が求められる電動機も多い中で1〜2ヶ月に一度の点検を計画的に行うことは、保全現場の人手不足、技術者不足が深刻化している中で、難しくなっている。
特に、定期点検項目の一つである固定子巻線とアース間の絶縁抵抗(以下、絶縁抵抗)の測定に関しては、電動機を停止させ絶縁抵抗を測定するのが一般的であり 1)、計画的な点検をさらに難しくさせる一つの要因となっている。
そのため、電動機を運転状態で絶縁抵抗を測定する技術が望まれており、絶縁抵抗または、その代わりとして漏洩電流を常時監視する製品が弊社を含め各メーカから提案されている 2)。
加えて、省エネ効果 3)を求めてインバータ駆動される電動機の絶縁抵抗の計測は、従来の技術・製品 2)では対応できない条件があり、新たな計測技術が望まれていた。
1.2 従来技術の計測手法
従来技術・製品の課題と解決策を述べるにあたり、本節では一般的な電動機運転状態での絶縁抵抗計測手法を述べる。
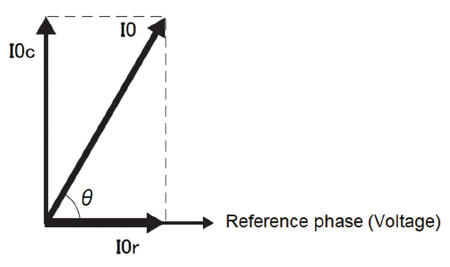
電動機運転状態での絶縁抵抗は、漏洩電流(以下I0)と対地電圧から、オームの法則により算出することができる。ただし、I0には、電動機に限らず一般的に対地抵抗成分の電流(以下I0r)と対地容量成分の電流(以下I0c)があり、I0cは絶縁抵抗に寄与しないため除去する必要がある。
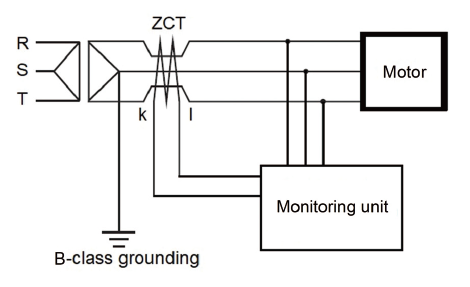
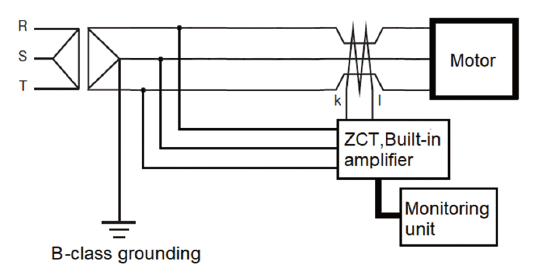
I0rの計測には受動的方法および能動的方法がある。受動的方法では、零相変流器 4)(以下 ZCT)より取り出したI0から、“I0rは電源電圧と同位相”、“I0cは90°進み”、という原理を用いて分離抽出する。図1に位相の関係、図2にシステム構成図を示す。
一方、能動的方法は、重畳用変成器を用いて接地線に電源系統とは異なる周波数の信号を重畳させ、重畳信号をZCTから取り出し、I0rとI0cを算出してその影響を除去する 5)。
本稿では、重畳用変成器が不要で設置しやすい受動的方法を採用して検討を行った。
1.3 従来技術の問題
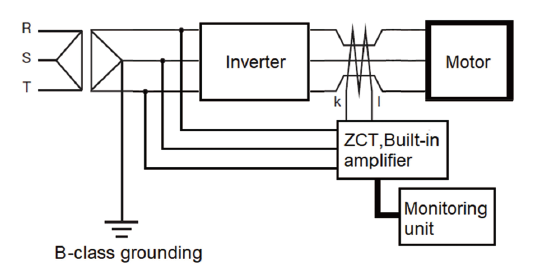
電動機をインバータで駆動する場合は、商用電源周波数のI0に、インバータから放出される伝導ノイズやインバータ運転周波数のI0が重畳するため、除去しなければならない。この方法が、文献 6)で提案されているが、特に、商用電源周波数とインバータ運転周波数が接近した場合に、対地電圧とI0rの間で ”うなり(beat)” が発生し、絶縁抵抗の算出に大きな誤差が出る。これが、活用できるアプリケーションが限られるという大きな問題につながる。
第2章において、問題解決のため、インバータ運転周波数に起因する “うなり” を避けて絶縁抵抗を高精度に計測する手法を示す。
1.4 実用化における課題
図2のように、一般的なZCTの出力端と監視ユニットは、有線で接続される。電動機の絶縁抵抗は、1MΩ以上であることが推奨されおり 1)、対地電圧200Vならば、I0rは200μA以下になる。このとき、ZCTの一般的な変流比として1,000:1とすれば、ZCTの出力電流は200nAという微小なレベルとなる。このような微小信号を測定するため、一般的な工業環境において、周囲の動力配線などから受けるノイズの抑制を課題とした。
第3章にて、常設型機器として実用化するための課題と対策、第4章にて、今回開発した製品を使っての検証結果を示す。
2. 提案する運転状態での計測手法
2.1 インバータの “うなり” の影響
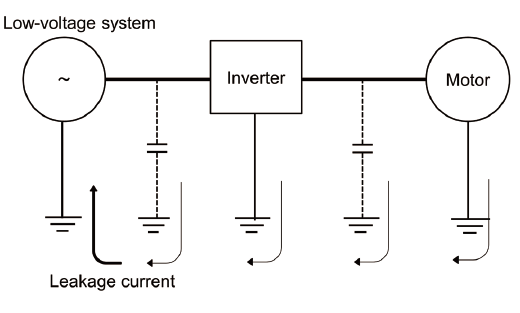
電動機をインバータ駆動した場合、図3のように商用電源周波数による漏洩電流(以下I0SYS)、インバータの高周波ノイズによる漏洩電流(以下I0NOISE)、インバータの運転周波数による漏洩電流(以下I0INV)がそれぞれ大地へ流れ、重畳された状態で電源系統の接地された相に還流する) 7)8)。絶縁抵抗Roは、オームの法則からRo=V/Iで算出される。算出の際、基準の電圧を商用電源とした場合、ZCTで検出したI0からは、インバータ運転周波数の影響を受けて絶縁抵抗算出が困難である。そのため、商用電源周波数に基づくI0SYSを抽出する技術を得て、絶縁抵抗Roを算出する必要がある。
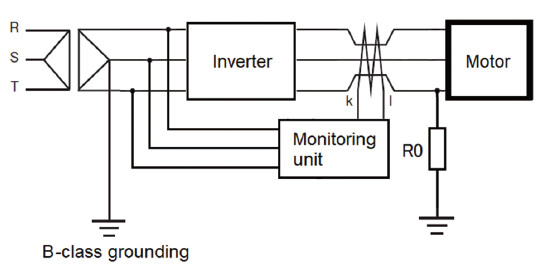
商用電源周波数とインバータの運転周波数が、接近した場合と異なる場合を比較検証したシステム構成を図4に示す。商用電源周波数を60Hzとし、インバータ運転周波数が異なる場合として50Hz(a)、また “うなり” が起きやすい60Hz 近傍(b)に運転周波数を設定した。電動機の絶縁劣化に起因しないI0NOISE成分の影響を除去するため、ZCTはインバータの出力側に挿入した。監視ユニット内には商用電源を参照信号とする同期検波器(Phase Sensitive Detector)を構成して測定を行った。I0を発生させるため既知の抵抗R0を設置し、I0を計測した結果を図5に示す。
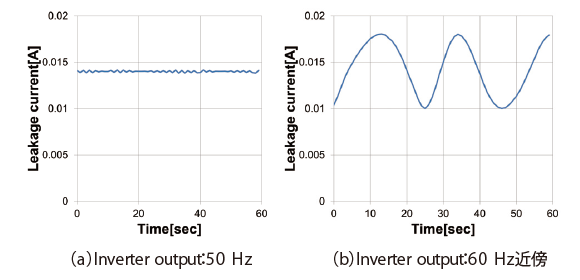
50Hz(a)の場合は、同期検波によりI0NOISEおよびI0INVが除去され、I0=I0SYSとして計測できている。60Hz(b)においては、商用電源周波数に接近しているため、同期検波を用いてもI0に、I0SYSとI0INVが重畳された状態で “うなり” を生じている。この “うなり” が運転状態でI0の計測を阻害する要因である。
2.2 提案の漏洩電流分離手法
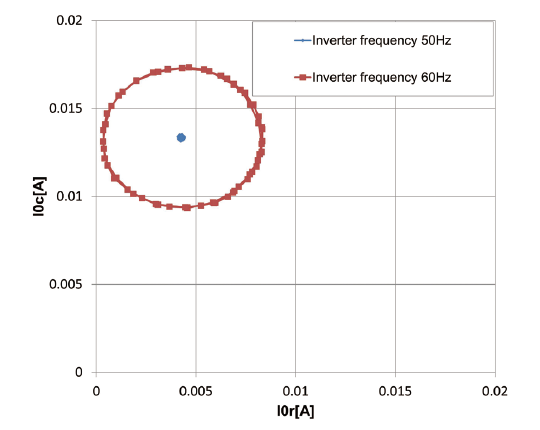
“うなり” がある状態でも商用電源周波数に基づくI0SYSを測定する手法を述べる。I0rとI0cを分離するため位相情報を用いて、図5に示したI0を2次元で表現した結果を図6に示す。
50Hzにおいては同期検波によりI0=I0SYSとなり、I0は同一点に集中する。60Hzにおいては、I0SYSとI0INVが重畳された状態で、I0が円を描く。そのときのI0は式(1)で示される。なお、式(1)の周波数Δfは基準である商用電源周波数とインバータ運転周波数の差を意味する。

図6と式(1)から、インバータ運転周波数が商用電源周波数に接近した場合、I0SYSはインバータ運転周波数に関係なく、円の中心点から算出すればよいことがわかる。
2.3 計測手法の高速化
電動機のアプリケーションには寿命を延ばすために複数電動機を一定間隔で切り替えて運転を行う交互運転方式があり、その間隔は短いもので数十秒~数分単位で行われている。
このような電動機の駆動時間が短いアプリケーションにも適用できるよう計測時間を短縮するため、円周が閉じる前に、最小二乗法を使って図6に記した軌跡の中心を算出した。
図7は、数秒内の計測値の軌跡から最小二乗法を使ってI0を算出した結果である。数秒で商用電源周波数に基づくI0SYSが算出できている。I0rは円の中心座標のX 値に相当するので、1.2項に記載の従来技術で算出できる。
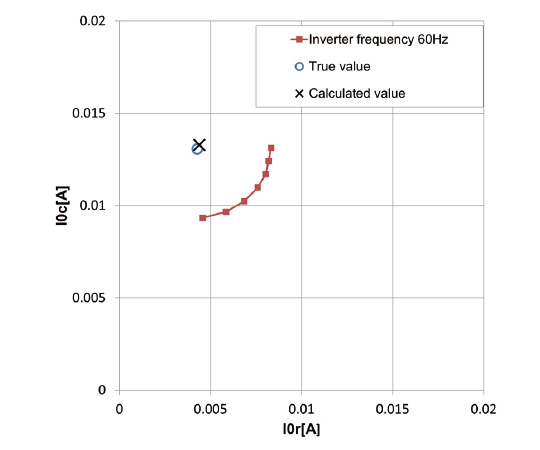
以上に述べた手法で、インバータ運転周波数の影響を除き、短時間で商用電源周波数に基づくI0rおよび絶縁抵抗の算出が可能となる。
3. 常設型機器としての実用化
3.1 実用化するための課題
実用化するには、測定環境のノイズの影響を低減することも重要である。状態監視機器として常設する場合、設置できる場所が限られるため、環境に起因するノイズの影響を受けて必要なS/N比を確保できない懸念があるためである。
ノイズにも様々なものがあり、動力線などが発する商用電源周波数の誘導ノイズに最も大きな影響を受ける。これは、誘導ノイズの周波数がI0rと完全に同期しているためである。
3.2 I0rと同期したノイズの対策
ZCTと監視ユニット間の配線長が短いほど誘導ノイズの影響は小さくなるため、配線長に制限を設けることを検討した。しかし、実際のフィールドで誘導ノイズと配線長の関係を調査したところ、測定精度を保つためには配線長を数cmに抑える必要があると分かった。
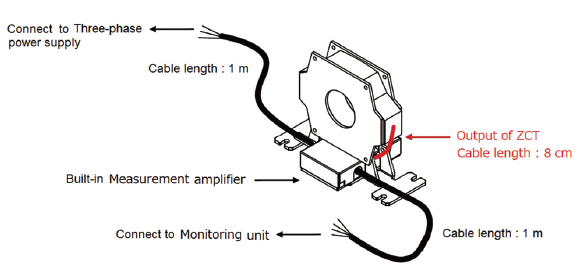
これを実現するために、ZCTに計装アンプを一体化した。計装アンプでA/D変換しディジタル信号として監視ユニットへ送ることで、ノイズ耐性を維持しながら、配線長を飛躍的に伸ばすことが出来る。
3.3 対策の具現化
図8は今回開発した計装アンプ一体型ZCTの概略図である。計装アンプを動作させる電力は、監視ユニット側から供給する構成としてシステムを小型化した。
図9に今回開発した監視ユニットの外観、図10及び図11に絶縁抵抗計測のシステム構成図を示す。インバータの有無によらず、基準電圧は商用電源から直接取り込み、ZCTは電動機の近傍に設置する。

4. 性能評価
今回開発した計装アンプ一体型ZCTと監視ユニットを用いて、実際のフィールドで性能評価を実施した。
インバータ駆動における性能評価は、3章で示した誘導ノイズ対策が十分なレベルにあることが前提になる。前提を確認するため、図10のシステム構成で、商用電源直入れ駆動での評価を実施した。
実際に絶縁劣化している電動機を使って、一般的な絶縁抵抗計での測定結果と比較検証するのが理想であるが、そのような電動機は入手困難である。代わりに、図4のように既知の抵抗R0を設置し、絶縁抵抗の劣化を模擬した状態で測定した。この時に使用した電動機は初期の健全な状態であり、絶縁抵抗は絶縁抵抗計による測定で100MΩ以上を示していた。なお、電源は三相200V/60Hzとした。
検証結果を表1に示す。R0=1.0MΩに対して測定結果の誤差は5.7%であった。3章で述べた対策を行わず、図2のシステム構成であれば、同条件で誤差50%を超えるレベルであり、大幅に改善している。絶縁劣化が進行していくことを模擬してR0を小さくすれば、それに追従した測定結果となっており、実際の保全現場での状態監視に十分耐えうる性能であると判断できる。なお、これはT相の絶縁劣化を模擬しているが、他相の検証でも同様の結果が得られている。
| R0 [MΩ] |
測定結果 [MΩ] |
誤差 [%] |
参考:I0r理論値 [μA] |
|---|---|---|---|
| 1.0 | 0.943 | -5.7 | 200.0 |
| 0.9 | 0.853 | -5.2 | 222.2 |
| 0.5 | 0.499 | -0.2 | 400.0 |
| 0.2 | 0.199 | -0.5 | 1000.0 |
次に、図11のシステム構成で、インバータ駆動での性能評価を行った。インバータの運転周波数を変える以外は、直入れ駆動と同じ条件である。
商用電源周波数と接近した場合として、運転周波数を60Hzに設定した検証結果を表2に示す。従来方式では、R0=1.0MΩでの測定結果が、0.2MΩ〜1.3MΩ程度の範囲でバラついていたが、本技術では安定して高精度な測定結果が得られた。インバータ駆動における従来の問題を解決して、絶縁抵抗1 M Ωを基準とする状態監視を実現する性能を有していると判断できる。
| R0 [MΩ] |
測定結果 [MΩ] |
誤差 [%] |
参考:I0r理論値 [μA] |
|---|---|---|---|
| 1.0 | 0.976 | -2.4 | 200.0 |
| 0.9 | 0.879 | -2.3 | 222.2 |
| 0.5 | 0.492 | -1.6 | 400.0 |
| 0.2 | 0.207 | 3.5 | 1000.0 |
商用電源周波数と異なる場合として、運転周波数を50Hzに設定した評価結果を表3に示す。インバータ運転周波数によらず、絶縁抵抗の計測が実現できていることを確認した。
| R0 [MΩ] |
測定結果 [MΩ] |
誤差 [%] |
参考:I0r理論値 [μA] |
|---|---|---|---|
| 1.0 | 0.944 | -5.6 | 200.0 |
| 0.9 | 0.844 | -6.2 | 222.2 |
| 0.5 | 0.508 | 1.6 | 400.0 |
| 0.2 | 0.210 | 5.0 | 1000.0 |
5. むすび
インバータ駆動において商用電源周波数がインバータ運転周波数と近く“うなり” 現象があっても、提案するユニークな漏洩電流分離手法により高速に絶縁抵抗を計測することが可能となった。さらに、計装アンプ一体型ZCTにより、工業環境に常設する機器として、ノイズ耐性も実用に耐え得るレベルで製品化することが出来た。本技術により、アプリケーションを限定せず、電動機が運転状態で状態監視ができる。
「モータ状態監視機器K6CMシリーズ」では絶縁抵抗測定以外に振動、温度、電流の測定が可能であり、それぞれの機器を組み合わせることで、電動機の各種故障要因に紐づく状態監視が可能となる。これらを常設し、リアルタイムで設備の状態を把握することで、保全現場の事後保全を最小化し、予防保全へ転換できると考える。
参考文献
- 1)
- 日本電機工業会:「JEM-TR 160 一般用低圧三相かご形誘導電動機の取り扱い及び保守点検指針」, 1987.
- 2)
- 古谷一彦. 低圧回路の漏電検出技術. 電気設備学会誌. 2013, Vol.33 , No.4 , p.254-256.
- 3)
- 日本電機工業会. 「伸びゆくインバータ」2017~2018年版パンフレット. 2017, 5200, p.1-8.
- 4)
- 大浜庄司. 自家用電気技術者実務読本. 第2版, オーム社, 1988, 256p, ISBN4-274-03208-6.
- 5)
- 日本電気協会 需要設備専門部会. 自家用電気工作物保安管理規定JEAC8021-2013. 第2版. オーム社, 2013, p.209-216.
- 6)
- タナシン電機株式会社. 漏洩電流算出装置及び漏洩電流算出方法. 特許第5631444号. 2014-11-26.
- 7)
- 森本雅之. 統合接地システムにおけるPWMインバータの漏洩電流への対策. 電気設備学会誌. 2011, Vol.31, No.6, p.436-442.
- 8)
- 飯盛憲一,篠原勝次,樋口剛. PWMインバータ駆動誘導電動機のコモンモード等価回路. 電子情報通信学会技術研究報告. EE, 電子通信エネルギー技術. 2002. p.19-24.