














UHF帯RFID安定読み取り技術
- RFID
- 安定交信
- 設置調整
- トレーサビリティ
- RFタグ

自動車業界では、リコール件数の増加が業界全体で問題となっている。リコール発生時の迅速な対応のため、全ての構成部品が、いつ、どこで生産されたかを特定する個体識別技術の重要性が高まっている。個体識別技術の中でも、粉塵や油汚れに強いという利点を持つRFIDは、短距離通信を目的としたHF帯RFIDと、長距離通信を目的としたUHF帯RFIDに分類される。しかし、UHF帯RFIDは周囲構造物からの電波の反射の影響によって、誤読取が発生するという問題があった。
そこで、生産現場におけるRFタグの動きに着目し、RFタグからの受信電力推移を検出することにより、非対象RFタグと対象RFタグを識別するアルゴリズムを開発した。この技術により、信頼性の高い長距離の個体識別システムが実現できる。
1. まえがき
自動車業界では、リコール件数の増加 1)が業界全体で問題となっている。リコール発生時には、リコール対象範囲の特定と製品の回収、および、生産工程の改善が行われる。この際、重要となるのが、問題となった部品の「加工・組立」が「いつ」「どこで」行われたかを把握することである。このように、製品の「加工・組立」の履歴を素早く追跡する能力を「トレーサビリティ」と呼ぶ。
生産現場では、トレーサビリティの確保のために、CR(コードリーダ)、HF(High Frequency)帯RFID(Radio Frequency Identifier)等の個体識別システムが利用されている。特に、RFIDシステムは、「汚れに強い」という特長を活かし、油よごれ等が付着する部品の個体識別に重用されてきた。RFIDは、磁界結合方式と電波方式に分類される。このうち、大型部品を識別するためには、長距離通信が可能なUHF帯RFIDを用いる必要がある。
しかし、UHF帯RFIDは、磁界結合を用いるHF帯RFIDとは異なり、電波を利用しているため、周囲構造物からの電波の反射により非対象RFタグを誤読取する場合がある。
電波の反射の影響を軽減するために、以下の方法が知られている。
しかし、生産ラインにおいて、①の方法は電波吸収体の設置場所がなく採用できない。②の方法はアンテナが大型化するため、設置スペースが確保できない。さらに、①②の方法いずれもコストが非常に高くなる問題もある。③の方法は、設置スペースやコストアップの問題はないが、設置調整の難易度が高いという問題がある。なぜなら、周囲構造物(例えば、近くの搬送装置や組立ロボット)は常に動いているため、電波の反射状態が常に変化する。その結果、非対象RFタグからの受信電力が測定する毎に変化するため、最適に調整できない。今までは、長期間の運用テストにより確認してきたが、問題発生のたびに調整が必要なため、調整完了に時間を要した。特に、製造ラインを変更するたびに、周囲構造物が変化し再調整が必要な環境では、運用が出来なかった。
そこで、我々は、従来のような通信領域を調整して非対象RFタグに電波を届けないようにするアプローチではなく、電波が対象RFタグと非対象RFタグの両方に届くことを前提として、両者を見分けるアルゴリズムを検討した。アルゴリズムによって、両者を見分けることができれば、設置スペースやコストアップ、および設置調整等の従来法の問題を解決することができる。
2. 想定利用シーン
UHF帯RFIDの利用シーンの一つとして、車体組み立てラインを想定している。図1のとおり、リーダライタの設置高さは3m~5m、RFタグ設置位置は車のルーフ上、RFタグ間距離は4~5m、車両高さは1~3mである。
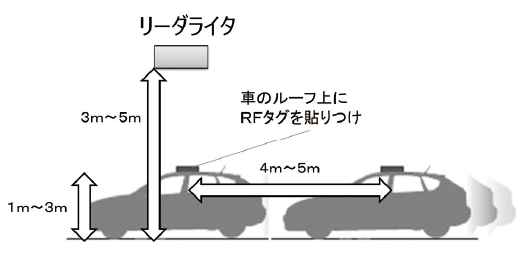
図1の利用シーンのシステムでは、コンベア制御装置や光電センサを使い、リーダライタの直下に車体が移動したことを検知し、そのタイミングで上位システムからリーダライタへ読み取りコマンド送信する。
3. 課題
リーダライタ直下にある対象RFタグに対して読み取りコマンドを送信した時に、前後にある車に設置された非対象RFタグを誤読取しないようにしなければならない。
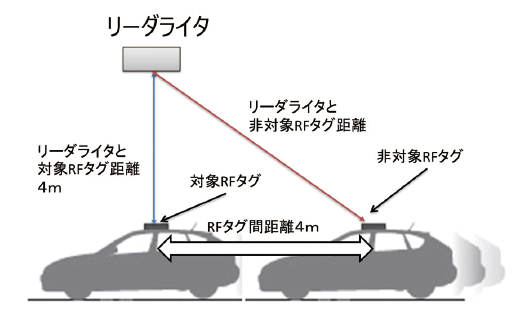
リーダライタから対象RFタグの距離(図2青線)に対して、リーダライタから非対象RFタグの距離(図2赤線)の差が小さい時に、対象RFタグと非対象RFタグの受信電力の差が小さくなり、誤読取が発生しやすい。
想定利用シーンでは、工場建屋の天井の高さは3m~5m、車高は1~3m程度であり、リーダライタから対象RFタグまでの距離は2~4m。また、非対象RFタグと対象RFタグは4~5mである。
想定利用シーンの範囲では、リーダライタから対象RFタグまでの距離4m、かつ、非対象RFタグと対象RFタグ間のRFタグ間距離4mの時が最も距離差が小さくなり誤読取しやすい条件となる。
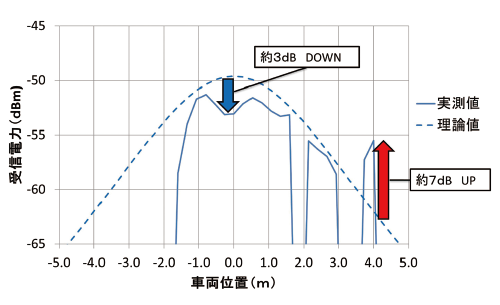
電波反射の無い理想環境においては、対象RFタグと非対象RFタグからの受信電力は図3のような軌跡を描く。対象RFタグ(青点線)の車両位置(0m、リーダライタの真下)に対象RFタグが存在するときに、非対象RFタグ(赤点線)と大きい電力差があるため、誤って非対象RFタグを読み取ることは無い。
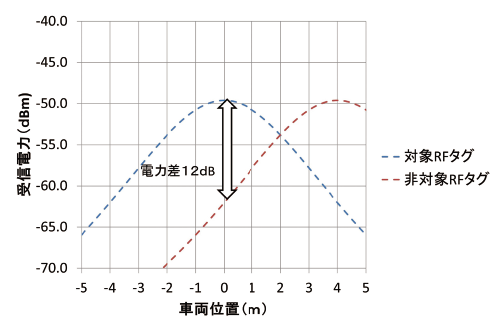
しかし、電波は周囲構造物の反射の影響を受けるため、実環境では図3のような振る舞いはしない。
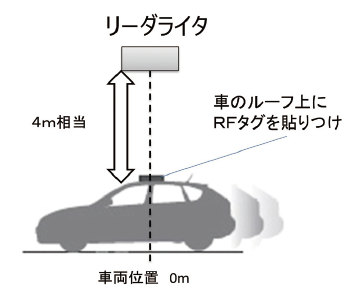
そこで、図4のように車のルーフ上に貼り付けたRFタグから4m相当(※1)の高さにリーダライタを配置し、周囲構造物としては、車両の左右約4mの位置に建物が存在する野外(※2)にて、実験を行った。なお、図4の点線に示すように、リーダライタの真下にRFタグが存在する位置を車両位置0mとして図5以降のグラフを表現している。
※1:実際には、ルーフから高さ1.5mの位置にリーダライタ取りつけ用の梯子を配置して実験を行い、相似則により4mに換算した。
※2:当社工場内に車両を入れられなかったため、野外にて実験をした。
実験結果を図5に示す。周辺に反射物がない場合の理論値と比較すると、中心位置は電力が3dB低下(図5青矢印)し、中心から約4mの位置では電力が7dB増加(図5赤矢印)している。
今回はRFタグ1つのみ使用した実験であるが、前後に非対象RFタグを実装した場合、図6の青線と赤線の受信電力の推移が観測されることになる。よって、図3の理論値では12dBの電力差であるが、約2.5dBの電力差(図6 白矢印)になることが推定される。

このように、理論値よりも遠くのRFタグの受信電力が増加し、誤読取する事象を「読みすぎ」という。
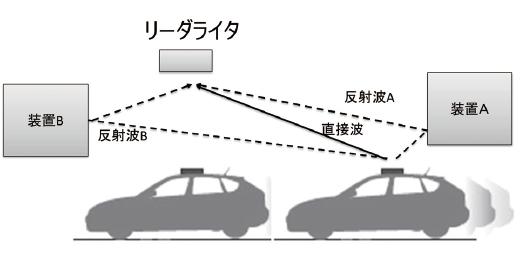
今回の実験では対象RFタグと非対象RFタグ間の距離4mの条件にて問題を確認できたが、4m以上の場所でも「読みすぎ」は発生する。なぜなら、今回の実験よりも工場内では周囲構造物が多く、図7の反射波A(装置Aからの反射波)、反射波B(装置Bからの反射波)のように複数の反射波が存在し、その合成波により読みすぎが発生するためである。
周囲構造物により受信電力が変動するメカニズムを4.1項にて解説する。
4. 技術内容
4.1 受信電力変動のメカニズム
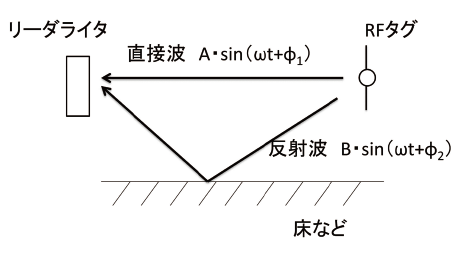
3項では、天井にリーダライタを設置し、下向きに電波を放射するシーンを説明したが、本項では、横向きに電波を放射するシーンでの電波の振る舞いを説明する。横向きに電波を放射するシーンでは主な反射面は床であるが、下向きに放射する場合は壁や装置等が反射面となるため、同様の事象が発生する。
リーダライタとRFタグへの電波伝播経路は、周囲構造物の影響により、直接波と反射波が存在する。(図8)
直接波と反射波の合成波は、以下の(式1)にて表される。
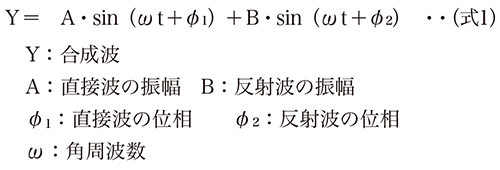
φ1=φ2の時は電波が強めあい受信電力の増加が発生する。一方、φ1=φ2+πの時は電波が弱めあい受信電力の低下が発生する。特にA=Bとなる場合は全く読めなくなる。
ここで、交信領域内での受信電力を可視化するため、図9のような当社実験室内(天井5m、左右の壁間幅7m、リーダライタから奥の壁まで25m、リーダライタ設置高さ1m)において、受信電力マップを測定した。
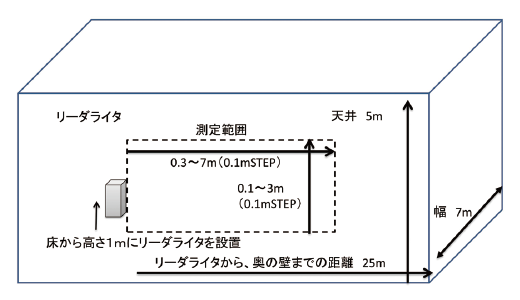
図10において、電力が増加して読みすぎているポイント(赤矢印の領域)と、弱めあって読み抜けしているポイント(橙矢印の領域)が確認できる。
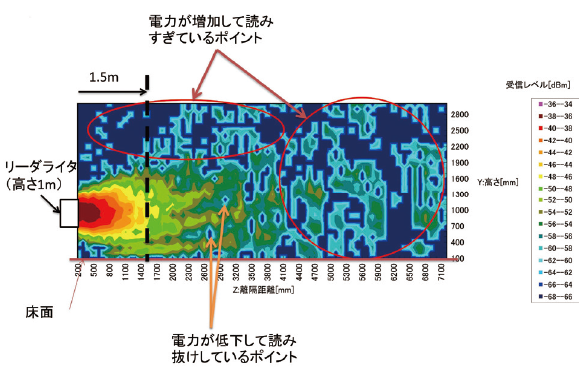
ここで、リーダライタから1.5mの距離(図10の点線の位置)の受信電力をプロットした(図11)。
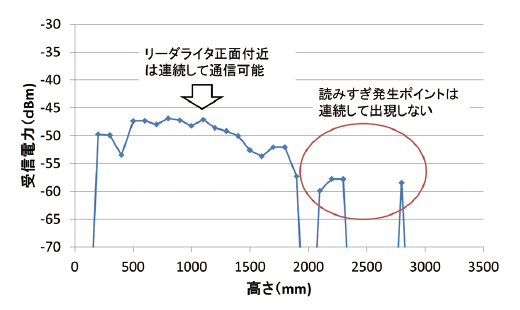
図11で示すとおり、リーダライタ正面付近は、連続して通信できるのに対して、読みすぎ発生ポイントは連続して発生しない。これは、正面付近は、反射波より直接波が十分強いため、反射波の影響を受けにくく、受信電力の変動が少ないのに対して、読みすぎ発生ポイントは、直接波が弱いため反射波の影響を強く受け、受信電力の変動が大きくなるためである。
なお、工場環境では、搬送装置や組立ロボット等の周囲構造物は常に動いており、反射波は常に変化する。このため、読みすぎは定常的に発生するのではなく、発生する時と発生しない時がある。
4.2 誤読取防止技術
4.1項の図11のとおり、リーダライタから一定距離をRFタグが移動している時の受信電力を測定すると、図12のような推移となる。対象RFタグ(図12青線)に対して、非対象RFタグ(図12赤線)の他に、非対象RFタグを読みすぎ(図12橙線)が発生し、▽のタイミングでコマンドを発行すると非対象RFタグを誤読取する恐れがある。
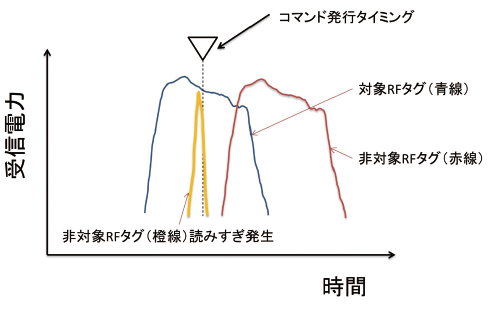
そこで、交信を開始してからコマンド発行タイミングまでの個々のRFタグのID毎に受信電力の積分値を求めて、誤読取を回避する。
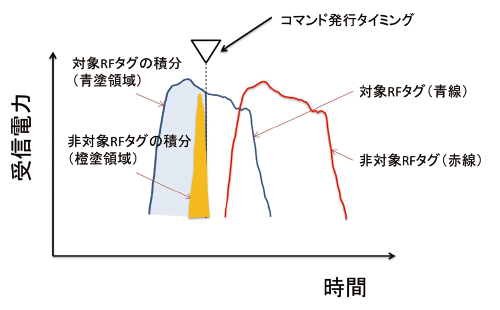
原理を説明すると、積分により図13の青塗り領域の面積と図13の橙塗りの領域を算出していることになる。読みすぎは連続的に発生しないため、青塗り領域の面積よりも橙塗り領域の面積方が小さくなる。よって、コマンド発行タイミングの時に、非対象RFタグの電力が対象RFタグより大きい場合でも、正しく対象RFタグを読み取りできる。
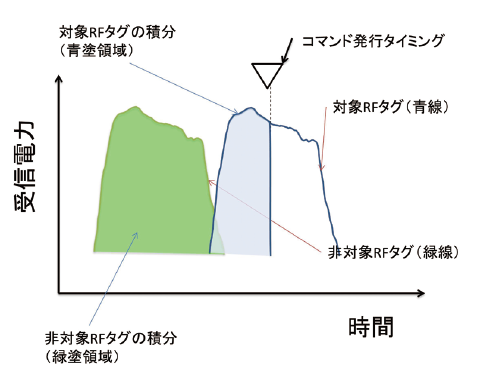
図13では、単純な積分処理を説明したが、対象RFタグよりも先に非対象RFタグが通過した場合は、単純積分では正しく対象RFタグを識別できない。
具体的には、図14において、先行する非対象RFタグの積分領域(緑塗領域)は、対象RFタグの積分領域(青塗り領域)の方が小さく、先行して通過した非対象RFタグを選択してしまう。
上記を解決するため、本技術では、過去の受信電力値の積分に重み係数を加えている。
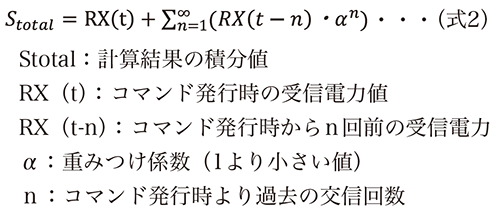
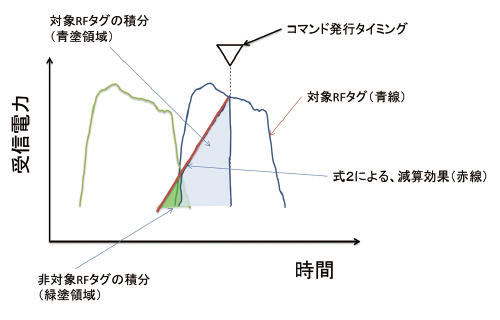
(式2)により、1回前の受信電力の結果は係数α分だけ小さく計算し、n回前の受信電力の結果は係数α^n分だけ小さく計算している。よって、図15の赤線以下の面積を求めていることになる(式2による減算効果)。これにより、対象RFタグの積分値(図15青塗り領域)は、非対象RFタグの積分値(図15緑塗り領域)よりも大きい値になるため、対象RFタグを識別可能となる。
4.3 効果検証
図5の実測データを元にシミュレーションによる効果検証を行った。図16のように、コマンド発行タイミングで非対象RFタグの読みすぎが発生しているとする。
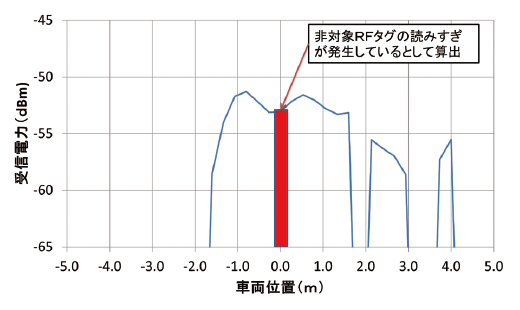
図17に、積分処理後の値を示す。対象RFタグ(図17青線)は-1.8m付近から交信開始され積分値が上昇していく。非対象RFタグは、図17の赤線のように車両位置0mの時点で入力されるため、急激に立ち上がる。
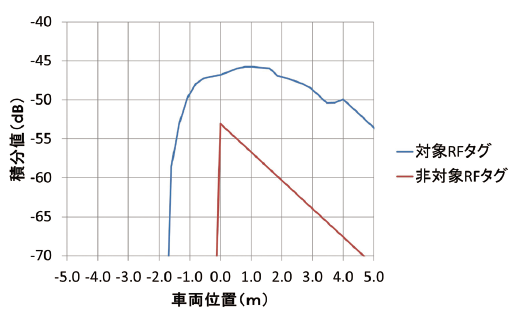
図17の対象RFタグ(青線)の積分値と非対象RFタグ(赤線)の積分値の差分を計算すると、図18の赤線の軌跡となる。0dBより大きい緑の領域は、正しく対象RFタグを読みとれる領域である。
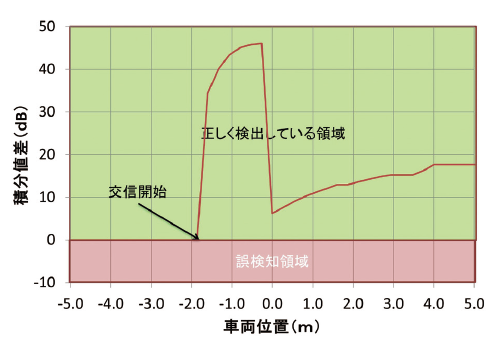
図18では、-1.8mの交信開始以降、対象RFタグと非対象RFタグの差分値が0dB以下になることはなく、コマンド発行時に非対象RFタグの受信電力が強く検出されたとしても問題なく識別できることを確認できた。
本技術を、弊社製UHF帯RFID(形V780-HMD68)に、「フォーカス機能」として実装している。形V780-HMD68の外観を図19に示す。

5. むすび
UHF帯RFIDにおいて、RFタグからの受信電力の推移を積分することにより、誤読取を排除することに成功した。本技術の特徴は、従来のリーダライタと同等のハードウェア構成でありながら、設置調整をすることなく、誤読取を排除できることである。本技術により、省スペースで安価、かつ、信頼性の高い長距離の個体識別が可能となる。
今後の課題としては、リーダライタ間の干渉問題への対応が挙げられる。本技術はRFタグからの受信電力を監視するために常時電波を放射しており、リーダライタ間の設置間隔が短い場合は、干渉が発生し、交信可能なポイント数が減少することで、対象RFタグを正しく識別できなくなる恐れがある。
このような問題に対応するため、今後もアルゴリズムの改良を重ね、お客様のライン設計に柔軟に対応できる信頼性の高い長距離個体識別システムを提供していきたい。
参考文献
- 1)
- 国土交通省 各年度のリコール届出件数および対象台数
http://www.mlit.go.jp/jidosha/carinf/rcl/data_sub/data004.html - 2)
- 東京工業大学 建造物からの反射強度の抑制
https://www.jstage.jst.go.jp/article/itej1954/31/1/31_1_17/_pdf - 3)
- アンテナ工学ハンドブック オーム社, 開口面アンテナ, p153-p154