














コア技術
展示会
「人と機械の融和」の具現化に挑む、若き開発者たちの挑戦
2022.7.29
オムロンが、様々な社会的課題を解決するために目指す人と機械の未来像である 「人と機械の融和」。その未来の人と機械の関係は、機械が人の可能性や創造性を高め、能力を引き出す関係性です。
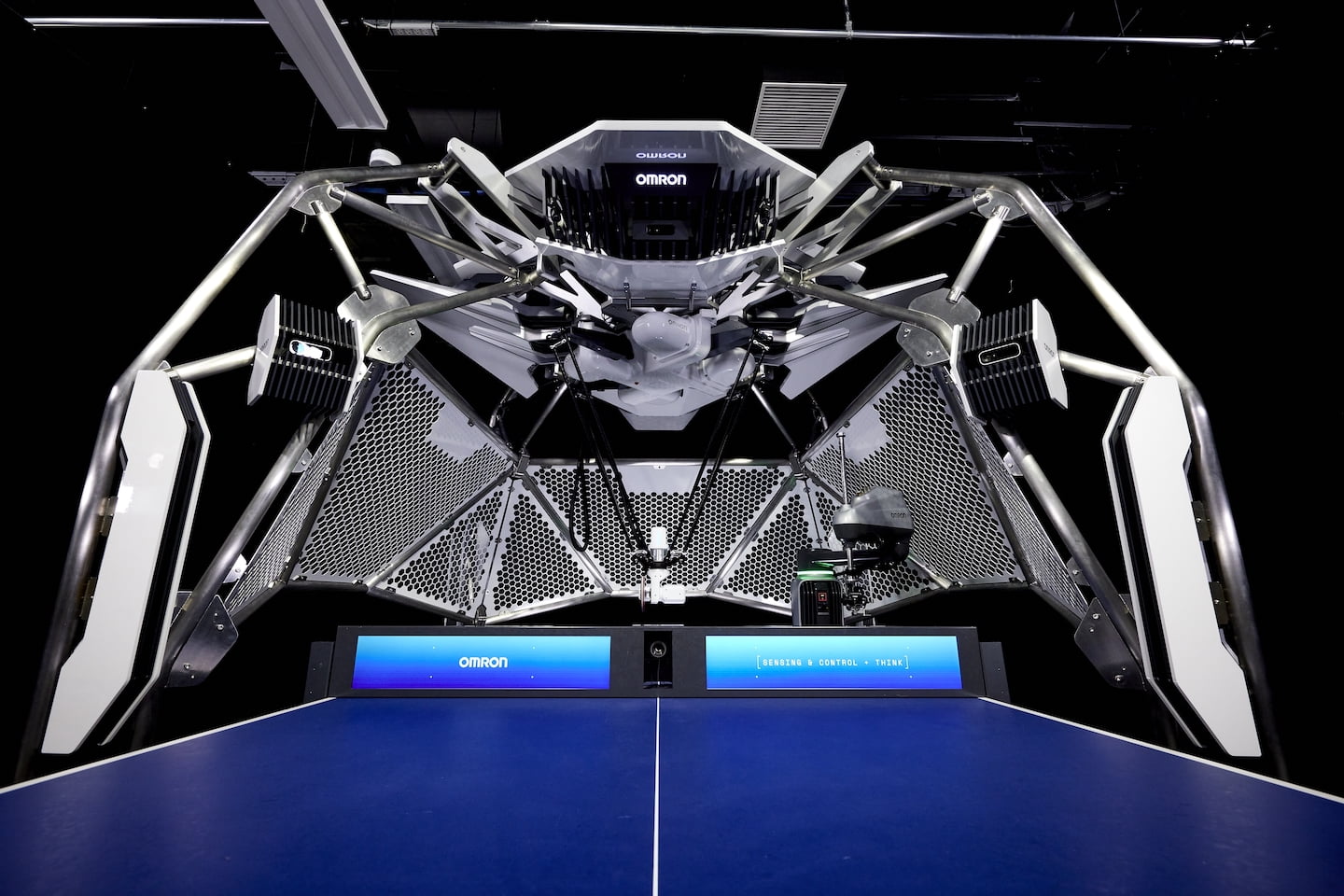
この「融和」の世界を体現し、オムロンのコア技術“Sensing & Control +Think”を象徴するのが、「卓球ロボット FORPHEUS(フォルフェウス)」です。2013年に海外で開催した自社の展示会で初披露したもので、技術・知財本部の若手技術者を中心にした研究開発チームが毎年ロボットの進化に挑戦しています。
最新機である”第7世代フォルフェウス“は、2022年3月に開催された国際ロボット展「iREX2022」で初披露しました。そこには、新型コロナウイルスの感染拡大による逆風からヒントを得た新機能を追加するなど、数々の挑戦がありました。その第7世代フォルフェウスの開発ストーリーと、さらなる進化に向けた開発メンバーの想いを紹介します。
<メンバー紹介>
第7世代フォルフェウス開発メンバー:
| 主な担当 | |
|---|---|
| 劉 暁俊(写真右端) | ロボット制御、機構設計 |
| 栗栖 崇紀(左端) | 自律調整機能、インタラクション設計 |
| 伊藤 喜輝(左から2人目) | ロボット制御、セーフティ技術 |
| 水山 遼(右から2人目) | インタラクション設計、センシング技術 |
次世代フォルフェウス開発メンバー:
| チームリーダー 大塩 祥剛(中央) |
|---|
| 開発メンバー 伊藤 喜輝、水山 遼 |
「人と人をつなぎ、チームとしての可能性や創造性を引き出す」ことを具現化する
第7世代はダブルスでラリーすることができるようになったと伺いました。その目的と特徴を教えてください。
水山:人の可能性や創造性を高め、能力を引き出す「人と機械の融和」を考える中で、これまでは、人と機械が1対1だったのですが、今回は複数の人の関係における「融和」を考えました。なぜなら、コロナ禍で顕在化した人と人のコミュニケーションが表面的なものだけになり関係の構築が難しくなるという課題に対して、「人と機械の融和」により、「人と人をつなぐ機械」ができるのではないかと考えたからです。
その結果、第7世代フォルフェウスは、“チームのパフォーマンスを高める”というコンセプトで開発し、2人がペアになってフォルフェウスとラリーできるようにしました。チームのパフォーマンスを高めるために、人と人との間の感情の共有や動作の連携に着目した機能を追加しました。ラリーをする中でプレイヤーの顔画像から表情や心拍数をセンシングし、その変化の相関から2人の気持ちがどれぐらい揃っているかの共感度を推定する機能と、ラリーのテンポや動きなどから2人の連携度を推定する機能を搭載しています。そして、それらを高めるラリーをフォルフェウスが先導することでペアとしてのパフォーマンスを高めていけるようにしました。

より高度な返球能力をもつロボットへ
第7世代フォルフェウスは、ロボットの構成が大きく変化したそうですね。その変化のポイントを教えてください。
劉:今回、フォルフェウスの返球に対応できる範囲を広くし、返球位置やスピードをより高精度・高速にするため、フォルフェウスの本体構成を一から見直し、一新させました。フォルフェウスは、工場などで一般的に使われている産業用ロボットや画像センサなどの汎用機器を組み合わせて構成していることが特徴です。ラケットを動かすのはパラレルリンクロボットを使用しています。そのパラレルリンクロボットを、これまでの3軸*1 から4軸*2に変更し、可動域の拡張と動作速度の高速化を行いました。この変更で、ネット際に打ち返されてくるボールにも対応できるようになり、フォルフェウスが返球できる領域は約1.5倍広くなりました。さらに、ラケットを動かす肘関節と手首関節に相当する部分の駆動用モータをアップグレードし、より強い回転をかけられるようになりました。
しかし、ラケットをもつパラレルリンクロボットが4軸となったことで、機構上の特性から軸間の同期性が極めて重要となるため、これを正確に高速で動かす制御は格段に難しくなります。このため、卓球の動きに特化した制御アルゴリズムをPLC(Programmable Logic Controller)でも動作できるように再設計しました。この制御アルゴリズムは、卓球だけでなく、例えば障害物をよけながら動く産業用ロボットの動作生成の高速化などにも転用できる可能性があると考えています。
*1 Hornet 565 パラレルロボット/特長 | オムロン制御機器 (omron.co.jp)
*2 iX4 パラレルロボット EtherCAT (NJ501-R)対応バージョン/特長 | オムロン制御機器 (omron.co.jp)
伊藤:上級者とさらに高度なラリーができるようにするためにフォルフェウスからの返球の高速化にも挑戦し、パラレルリンクロボットの動き方に改良を加えました。これまでは、まずボールの予測位置にラケットを移動させ、ラケットを保持している肘と手首に相当する部分だけで返球していました。しかし今回からは、より速い返球をするために、ラケットがボールの予測位置に行く動きとラケットのスイングを同期させてボールを打ちに行くようにしました。人の動きも同じで、腕だけでラケットを振るのではなく、体全体を使って返球した方が速く正確な返球ができますよね。

コロナ禍における展示会への出展と、その中で組み込んだ新しい機能
今回の第7世代フォルフェウスは、ダブルスへの対応や返球能力の向上以外の進化があると伺いました。どのような進化をしたのでしょうか?
栗栖:新機能として「自律調整機能」を搭載しています。これは、フォルフェウスが狙った位置に返球できたかどうか、自分でラリーの調子を診断してカメラやモータの状態をロボットのオペレーターに見える化し、返球位置の精度低下が検知された場合には性能を保つよう返球動作を適宜調整していくことができる機能です。これまでは、1日の展示の中で定期的にメンテナンスのための時間をとっていたのですが、この機能のおかげで、2022年3月に初めて展示を行ったiREXでは、会期の4日間をこれまでの展示会で初めて機械メンテナンス0回で終えることができました!
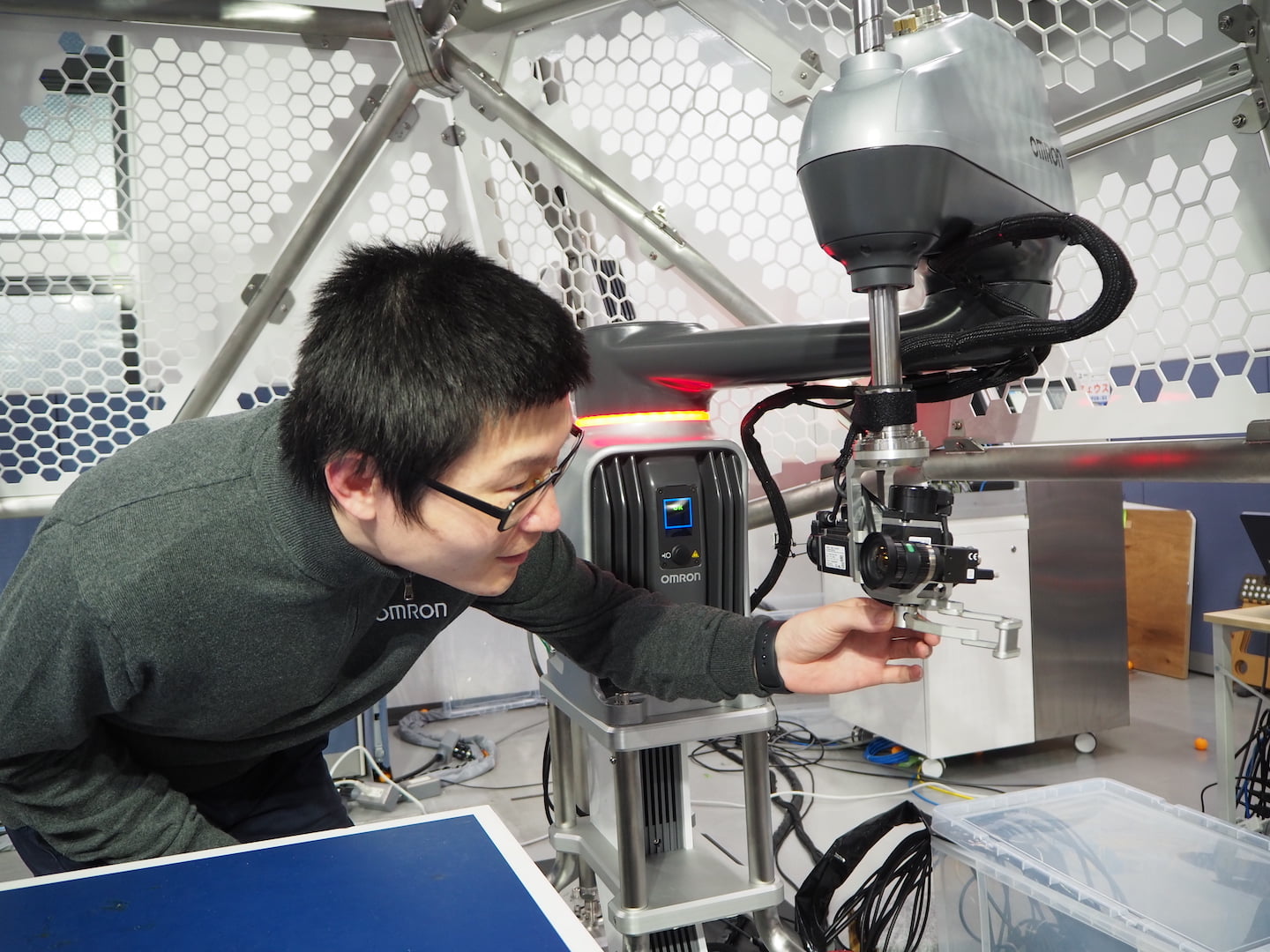
劉:今回、自律調整機能のために、スカラロボットの先端にカメラを取り付け、ラリー中のフォルフェウスのラケットを追従し、ラケットのラバー表面の状態を常にセンシングすることで、ラバーの表面の汚れなどの状態変化に合わせた返球を行う機能を開発しました。また、このスカラロボットは、フォルフェウスからサーブを行う際に、ボールをトスする役割も担っています。
自律調整機能を搭載しようと思ったきっかけは何だったのでしょうか?
栗栖:コロナ過に対応した展示会への出展のためです。フォルフェウスはこれまで、アメリカ、ドイツ、中国など海外の展示会にも出展してきました。昨年は中国の展示会に第6世代フォルフェウスを出展したのですが、コロナ禍のため私たち開発メンバーは現地参加することができなくなり、ロボットのメンテナンスが大きな課題となりました。そこで、現地運営メンバーがメンテナンスの必要有無を判断できるように、ロボットが自ら性能低下を検知し、メンテナンスのタイミングを知らせてくれる「自己診断機能」を取り入れました。第7世代ではさらに、ラバーの状態変化の検知によりラケットの角度や高さを自律調整する機能を追加することで、定期的なラケットの清掃とワックス塗布を行うメンテナンスの削減を目指しました。
人と人をつなぎチームのパフォーマンスを高めるという「人と機械の融和」の新しい姿に対してどのような反響が得られましたか?
水山:連携度や共感度のセンシング、それを活用した「人と人をつなぎ、パフォーマンスを高める」というコンセプトに興味をもっていただきました。人と機械の融和という、“人”を中心とした私たちの考えに共感いただけたという手ごたえを感じることができました。
劉:iREXでは、残念ながら新型コロナウイルスの感染拡大防止の観点から、一般のお客様にラリーを体験いただくことができなかったのですが、実際に体験していただく機会があれば、人と人をつなぐために、フォルフェウスが自然とラリーをサポートしていることを感じてもらえると思います。
私たち開発メンバーがデモンストレーションを行っている様子を目にした来場者の方々の反応からは、ダブルスに対応したロボットの刷新によりフォルフェウスの返球精度やスピードへの驚きを感じることができました。
※2022年7月29日~8月4日の期間、日本科学未来館の展示会「空想⇔実装 ロボットと描く私たちの未来」に第7世代 卓球ロボット フォルフェウスを展示しています。ラリーを体験いただくこともできますので、ぜひご来館ください。空想⇔実装 ロボットと描く私たちの未来 Mirai can NOW(ミライキャンナウ) 第1弾 | 日本科学未来館 (Miraikan) (jst.go.jp)
新たな「融和」の探求に向け動き出した
4月から、新たなチーム体制で次世代フォルフェウスの構想を開始されていると伺いました。さらなる進化にむけて、どんな挑戦をしていきたいか教えてください。
伊藤:第7世代までで、フォルフェウスの技術・性能はひとつの到達点に達したと思っています。だからこそ、求められるハードルがあがっていて、期待と同時に大きなプレッシャーを感じています。人と機械の関係としてどのようなメッセージを伝えられるか。これまでの枠組みにとらわれないコンセプトを打ち出し、皆さんに「すごい!」と思っていただける進化をお見せしたいです。
水山:私は、ロボットはその存在感を強めるのではなく、いわば空気のように当たり前に人と人とのコミュニケーションの間に介在している世界になっていくのではないかと考えています。“当たり前”とは、人が意識せずとも、望む通りに機械が合わせてくれる状態です。現在は真逆で、効率化のために人が機械に合わせるという関係が多く、これは明確な課題を解決していく場面では有効だと思います。しかし、SINIC理論*3によれば、物質的豊かさを追求した工業化社会や、そこで生じた課題を解決する最適化社会を終え、これからは人が主役となり、自分らしさや可能性を発揮する、心の豊かさを追求する自律社会がくるはず。そこにあるべき姿は、効率化としての役割だけでなく、人が幸せに生活していくことを、ロボットが自然にサポートすること。そんな未来の姿を感じていただけるようなフォルフェウスをつくっていきたいです。
*3 未来を描く「SINIC理論」 | 経営の羅針盤-SINIC理論 | 企業理念経営について | オムロン (omron.com)
大塩:私は、この春からフォルフェウスの開発リーダーを担っています。フォルフェウスの開発に携わるのは初めてなのですが、「脱・前年踏襲」をモットーにしています。歴代フォルフェウスの開発をとおして、たくさんの技術や知見が蓄積されてきました。その一方で、それら自身が高いハードルとなり、フォルフェウスを進化させる新しいアイデアの創出が難しくなってきました。“人と機械の融和”を表現するものとして、もしかすると第7世代フォルフェウスは、そのロボット自体の存在感が強すぎるのではないかと考えています。卓球ロボットに限った話ではありませんが、もっと自然にロボットが活きる世界観が実現できたら面白いですね。
オムロンの長期ビジョン「Shaping the Future 2030」*4 で目指す未来に通ずるように、次世代だけではなく、さらにその先の “人と機械の融和”のあるべき姿も想定しながら、その土台を創りあげていきたいです。
*4 Shaping the Future 2030 | オムロン (omron.com)
このページを閲覧している方へのおすすめリンク:
フォルフェウス (FORPHEUS) 特設ページ| オムロン
プレイヤーのモチベーションコントロールを実現する卓球ロボットシステム | OMRON TECHNICS | R&D | テクノロジー | オムロン

