














コア技術
“人がより創造的であるために“
~機械が人に寄り添いアシストする、新たなロボット開発に挑戦~
2022.10.12
オムロンではロボット事業の拡大・加速を狙い、「新たなロボットの実現」 に向けて、既存のハードウエア構成やユーザビリティの点で既存のものと異なる、ロボット開発への挑戦を開始しています。これに合わせて、2022年4月には、太陽系をも飛び出す航海者になぞらえ “Voyager Project”と名付けた組織が誕生しました。どのような未来に向かって、新たなロボティクス技術の研究・開発を推進していこうとしているのか、Voyager Project部 部長の福島哲治と、ロボティクス技術統括部 技術専門職の杉原知道に語ってもらいました。

ロボティクスR&Dセンタ
Voyager Project部
部長 福島 哲治
ロボティクスR&Dセンタ
ロボティクス技術統括部
技術専門職 杉原 知道
近頃、ニュースで自動搬送や音声案内のようにサービス型ロボットを使った実証実験などがよく取り上げられていますが、ロボットの普及状況をどのようにとらえられていますか?
福島:ロボットは、ファクトリーオートメーションの領域ではすでに広く利用され、オムロンのロボットもグローバルに活躍しています。しかし、産業用のロボットは高速で動作するため、安全柵を設置したり、セーフティーセンサなどで人の接近をセンシングして停止させる機構を設ける必要があります。そして、ロボットで取り扱うものに合わせたハンドを製作する必要もあり、同じ作業を繰り返す部品を取り出す(ピッキング)工程や、溶接作業の専用機として利用されている事例がほとんどです。
また、家庭ではロボットとは異なる形で人の作業をサポート・代替する掃除機や洗濯機などの専用機が多数活用されている段階で、ロボットが広く普及するまでに至っていません。それは、ロボットはまだ汎用的に作業をこなせるほど賢く・器用になっていないためだと考えています。
杉原:現状、生産工場や物流倉庫などで働くロボットに求められるのは、基本的に位置決め装置としての機能です。「A地点からB地点へ搬送する」「部材Aをこの部分に溶接する」など、作業を位置の指令に翻訳した上で、それを遂行します。しかし、一般的な環境で作業対象物の位置を正確に規定することは困難ですし、そもそも作業を位置の情報だけで表現することは必ずしも可能ではありません。このため、ロボットの用途はまだまだ限られています。
オムロンが目指す新たなロボットとは
福島:オムロンは 「人がロボットに合わせる」 のではく、「人とロボットが共存できる世界」をつくりたいと考えています。そのためには、手先の器用さや状況に応じた動きの柔軟性、人のそばにいても違和感のない容姿、人が人に教えるように動作を教えることができることなどが必要です。これらができるロボットは今までの技術の延長線上にあるロボットでは難しく、新しいアーキテクチャのロボットの実現が必要と考えています。
杉原:決まった作業を繰り返すのではなく、開かれた世界で柔軟に振る舞える賢さを備えたロボットを作りたいと考えています。そのためには、モノの位置や形の情報の正確さに依存せず、作業対象物を含むロボットのおかれた環境とのダイナミックな関係変化に即応しながら高度な目的を達成する、新たな情報処理の仕組みが必要です。これにはソフトウエアだけでなく、ロボットの身体機構も含まれます。
お二人は将来どのようにロボットが活躍するとお考えでしょうか。
そしてそのためには何を解決することが必要でしょうか?
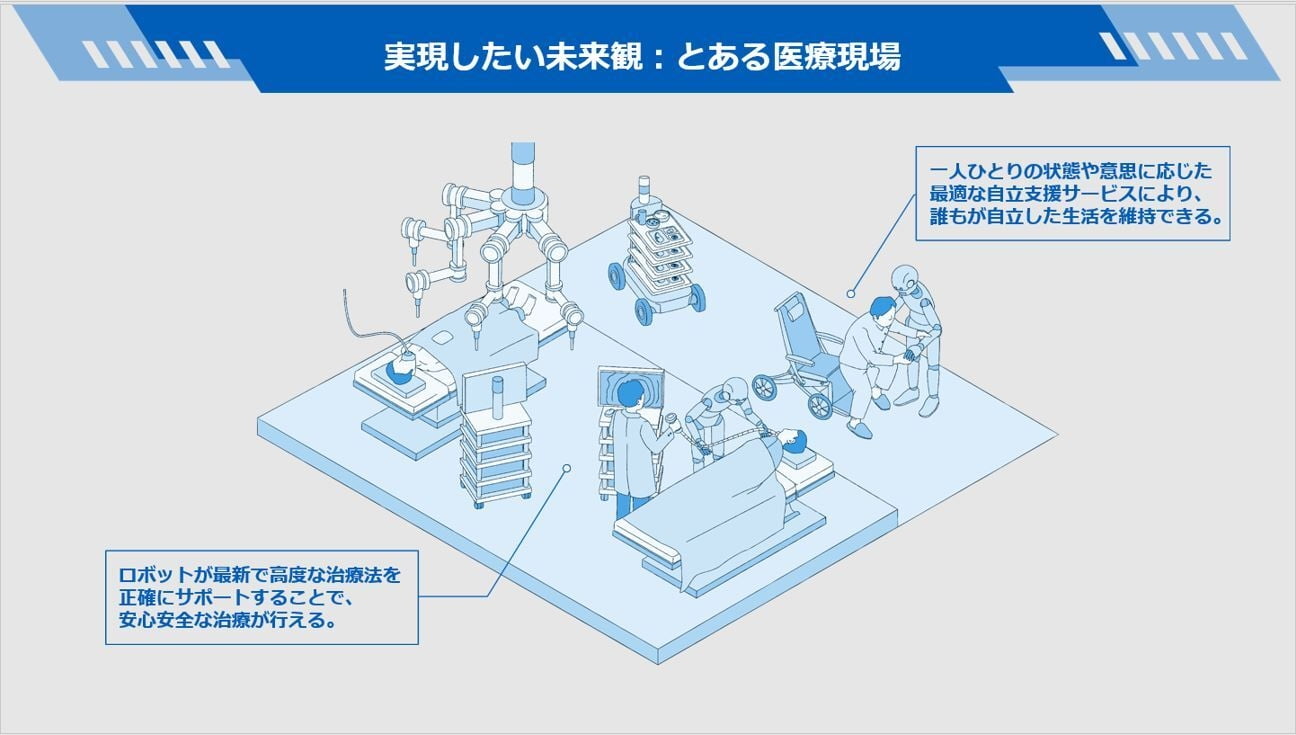
福島:まずはロボットを柵から解放し、人と同じ空間で動かせるようにしたいですね。そして、人には人にしかできない本質的な仕事をしてもらいたいと思います。例えば、腹腔鏡手術ではアシスタントをおこなうスコピストという医師が立ち会うそうですが、重い内視鏡を長時間持ち続けるそうです。遠隔手術を行う手術ロボットはありますが、非常に高額で広く普及しているわけではありません。医師のアシスタントのような役割を担うロボットを実現できれば、医師の負担を低減し、本質的な医師としての仕事に集中していただけるようになると感じます。
また、すぐ隣で一緒に働いたり、サポートしてくれたりするロボットにしたいです。例えば、一時的に動けない患者のサポートをロボットが担うことも意味があることだと考えます。看護を受ける立場からすると、ちょっとしたことを看護師さんにお願いするのは気が引けます。そのようなシーンで体の不自由な方をサポートする、介助犬の代わりを精神的な親和性もふまえてロボットが担う世界ができたら面白いですね。最近はやりの「お掃除ロボット」のユーザーの中には、ロボットに人形をのせて家族として可愛がられている人もいるようです。
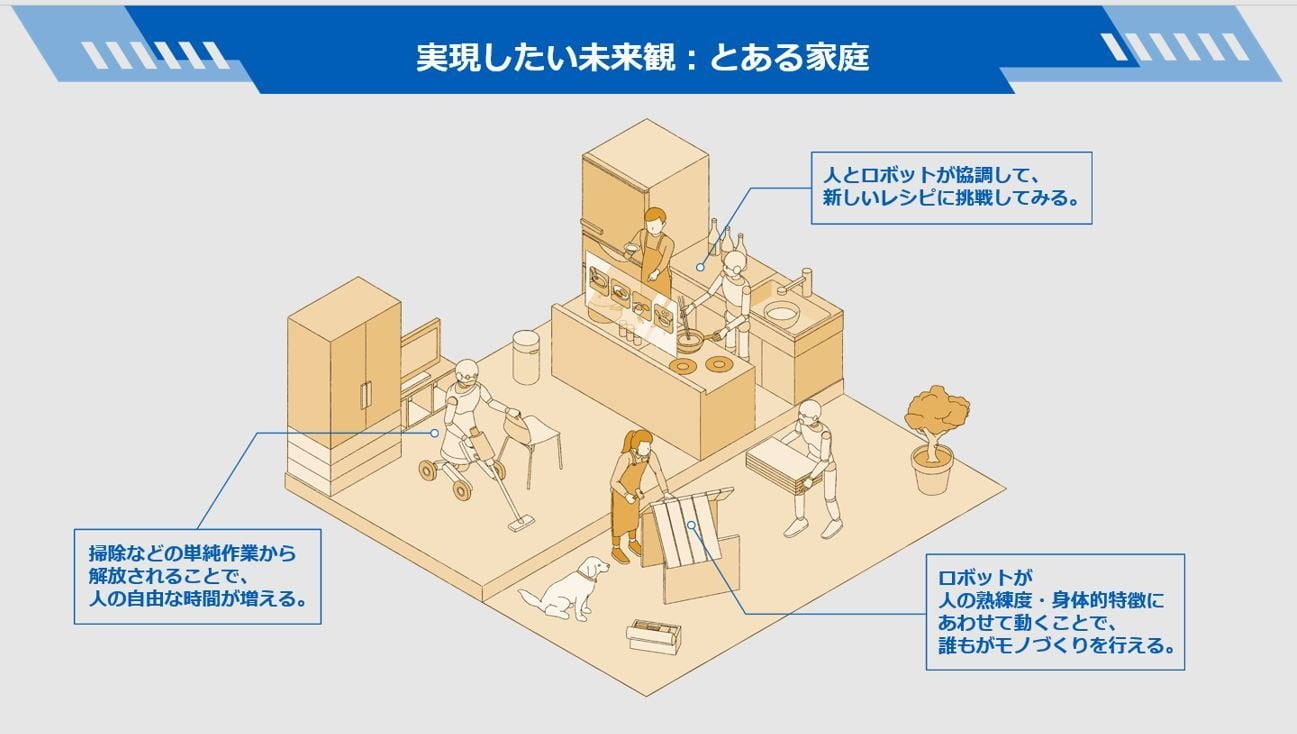
杉原:誰もが「もう一つの身体」を持っている未来、というのが究極でしょうか。本当は ,「やりたくない」 が 「やる必要がある」 重労働や危険を伴う作業を代わってくれたり、やりたいことをやる上で足りていない手や足になってくれたり、皆が自分のアイデアで便利に使えるもう一つの身体としてのロボットが普及していると良いなと思います。タフで自在に動かせる身体、初めて来た環境で初めて見たものをスムーズに操作できるスキル、複雑な作業内容を理解できる頭脳をどうすれば作れるか?など、解決すべき課題は山のようにあります。
従来オムロンでは、高速でハンドリングする制御アルゴリズムの研究(1)や力覚センサ信号を用いた作業完了状態の判定(2)、近接センサを用いた新しい触覚センサの
提案(3)を行ってきています。
アルゴリズム開発、センサ開発以外ではどのような技術開発が必要と考えられていますか?
杉原:ロボットは実世界と物理的に相互作用する情報処理システムです。個別の技術開発はもちろん大事ですが、全体としてどのような情報処理を行えば高度な作業ができるのか、そのアーキテクチャの中で個々の制御アルゴリズムやセンサはどのような機能を担うべきなのか、という見方の方がむしろ必要だと考えています。ここであげた技術だけでなく、オムロンが培ってきたさまざまな技術の資産とこれから作っていく技術とで、新たなアーキテクチャのロボットの実現を目指します。
オムロンがつくる機械が人に寄り添いアシストする新たなロボットにご期待ください。
このページを閲覧している方へのおすすめリンク:
人とロボットが近づく未来を目指して:
オムロン株式会社 技術・知財本部 副本部長 兼 ロボティクスR&Dセンタ長 関根 淳一
https://www.omron.com/jp/ja/technology/omrontechnics/introduction/introduction_166-1.html
リクルートのページ
https://www.omron.com/jp/ja/jinji/

