Corporate | Japan
Corporate | Japan










We are Shaping the Future!私たちが手繰り寄せる未来ストーリー
AI搭載の卓球ロボットフォルフェウスと、人+協調ロボットのダブルスで協働を実演
新型コロナウイルスによって生じたニューノーマルの時代には、これまで考えられていた以上にオートメーション技術の果たす役割が大きくなります。そのような中、機械が単独でできる範囲の作業をこなすだけでなく、人と機械の融和により相乗効果が得られるようなオートメーションへの期待が高まっています。
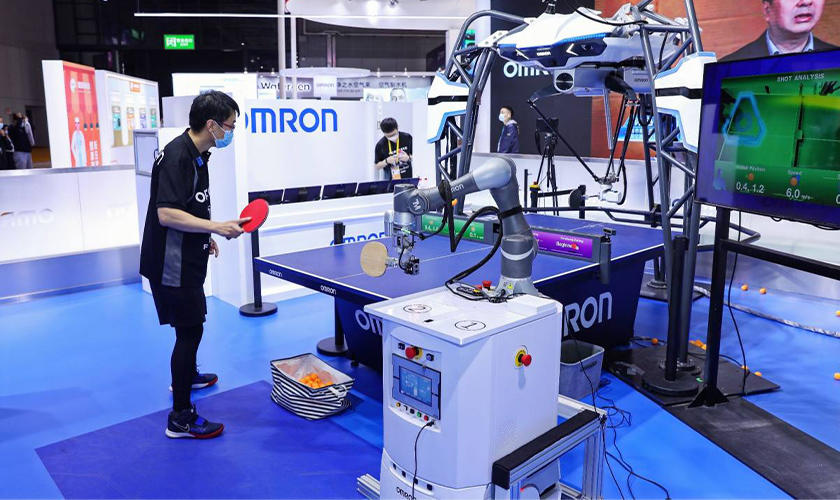
その実現を目指すオムロンは、コア技術である「センシング&コントロール+Think」で構成された卓球ロボット「フォルフェウス」と移動型作業ロボット「モバイルマニピュレーター(以下MoMa)」を使い、人と機械が協働するニューノーマル時代のオートメーションを卓球ラリーで具現化しました。今回、オムロンのエンジニアたちが挑戦したのは、2台のロボットを使った「人と機械のダブルス」です。
オムロンが考える「人と機械の融和」の象徴である、卓球ロボット「フォルフェウス」は、ファクトリーオートメーション用のカメラやセンサー、コントローラー、産業用ロボットなど、制御機器で構成され、人間のプレーヤーとの卓球を実現するロボットです。その開発は2013年に始まり、この7年の間に大幅な進化を遂げてきました。開発当初はラリーを続けることにも精一杯でしたが、最新の第6世代では、プレーヤーの「モチベーションを高めるAI」を搭載しています。オムロン独自の人計測技術で、プレーヤーの表情や瞬き、心拍などのバイタルデータをセンシングし、プレーヤーのスキルや感情に合わせて返球のコース、球種、スピードを選択できるまで進化しました。
今回、そのフォルフェウスが、初めて「ダブルス」を相手とし、ラリーに挑戦しました。その相手は、人間のプレーヤーと「協調ロボット」の混成チームです。まさに、人と機械が一つの目的に向かって協働するこのプロジェクト。どのようなラリーになったのでしょうか?
人とペアを組む協調ロボットは、MoMaと呼ばれる移動型作業ロボットです。これは、2つのロボットを合体したもので、センサーが人や障害物を検知して、それらにぶつかることなく自由自在に動けるモバイルロボットの上に、アーム型の協調ロボットが設置され、製造現場で搬送や部品の陳列、組立作業の自動化を担っています。従来、ロボットが作業を行う際、人にぶつかって怪我をさせることのないように、安全柵を設けるなどの対策が必要でした。しかし、協調ロボットは、人が触れたり、モノに接触すると、それを検知して安全停止します。また、丸みを帯びた形状で、人に接触してもけがをしにくいデザインになっており、人と一緒に、同じ空間の中で安全に作業することが可能です。センサーで人や対象物を検知して、人の安全も守りながら2つのロボットを高度に制御するというオムロンならではのオートメーション技術が詰め込まれたものがMoMaなのです。
こうした特徴を生かして、MoMaと人との混成チームが実現しました。

普段は製造現場で働くMoMaが卓球に挑戦するのは初めてです。もちろん、フォルフェウスと比べれば、その動きや返球範囲、スピードには制約があります。しかし、ダブルスの実演では、フォルフェウスは人とMoMaそれぞれの動きに合わせた返球を行い、人間のプレーヤーはMoMaが返球できないエリアを担当して、見事な連携プレーを見せました。フォルフェウス、プレーヤー、MoMaの三者は、お互いに協調しながら連続するラリーを実現したのです。異なる特性を持つ三者が役割分担をして、それぞれの得意分野で補い合い、一つの目的に対して協働する姿が具現化されたこのダブルスは、まさにオムロンの目指す「人と機械の融和」の1シーンを象徴するものでした。
人とロボットのダブルスを実現するにあたって、当然ながら技術的な課題も多くありました。今回の開発プロジェクトでフォルフェウスを担当した技術・知財本部 浅井恭平とMoMaを担当したインダストリアルオートメーションビジネスカンパニー 商品事業本部の阿部泰明は、当時を振り返ってこのように言います。
「MoMaにラケットを持たせ、人の手首のスナップに相当する動作をさせること、そして移動型ロボットのため足元が固定されておらず、スイングの際の振動発生が大きな課題となりました。スナップ動作を行うための3軸モーターを追加し、スナップ動作とアーム部の動作を合わせた一連のスイングを振動なく行うため、試行錯誤を重ねました。(浅井)」
「それぞれの課題を解決したうえで、フォルフェウスとMoMaを連動した1つのシステムとして機能させるためのプログラムを組む必要があり、2か月というタイトなスケジュールの中、メンバー一丸となって完成させました。(阿部)」

この人と機械による高度なダブルスは、中国の展示会(*)で初めて実演されました。フォルフェウスを動作させるには現地での実機調整が重要なため、通常は7名ほどの専門チームが帯同し、現地設営から運営オペレーションまでを実施しています。しかし、今年はコロナ禍で、現場に立ち会ったのはフォルフェウスチーム技術・知財本部の劉 暁俊1名だけでした。劉が現地ディレクションを行い、日本のフォルフェウスチームは、同型のフォルフェウスを使い、現地の状態を再現しながら行う「リモートモニタリング」による技術サポートで、立ち上げとダブルスを初めて実現しました。
内容、運営体制ともに、これまでにない試みとなりましたが、中国・上海出身の劉は「故郷で開催する展示会で、チームメンバーと開発してきた最新のフォルフェウスを披露することが私の開発モチベーションとなり、中国の人たちを驚かせたいという気持ちで臨みました。初のダブルスを実現し、大きなトラブルもなく会期を終えることができました。リモートモニタリングは、作業時間に限りのある中でのフォルフェウスの設営にかなり有効でした。場所にとらわれることなく迅速な技術サポートが可能であることを実証できた点も、非常に大きな収穫です。展示会だけでなく、生産設備の立ち上げやメンテナンスなどの遠隔サポートに活用できる可能性を感じました。」と話します。
これからのニューノーマル時代は、さまざまな現場で人と協調して支援を行う機械(ロボット)が当たり前の存在になっていくことでしょう。そして、人と機械は、今回のダブルスで見せた、機械の支援を得て人間の能力や可能性を拡げる関係性へ発展し、それぞれの得意分野で補い合うことにより、多様な人財が活躍できる環境が生まれてくると期待しています。
オムロンは、これからもコア技術「センシング&コントロール+Think」技術を軸に、社会的課題を解決するイノベーション企業として、更なる成長を実現していきます。







