2025/01/06
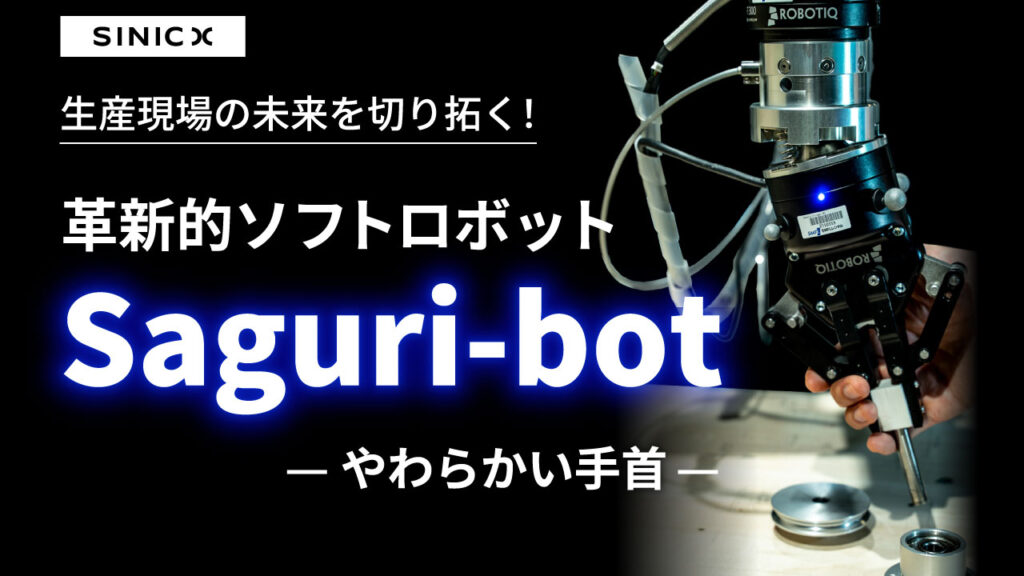
未来を共に創るパートナーを募集 ~触覚センサを備えたSaguri-bot(サグリボット)で、人間のような探り動作を実現~
ロボットによる多品種少量生産を実現しようとしても、ロボット導入コストに見合わないケースが多くなっています。それは、単純な作業工程であっても、ロボット導入には多くの労力がかかってしまうからです。 そこで …
Research
2025/01/06
ロボットによる多品種少量生産を実現しようとしても、ロボット導入コストに見合わないケースが多くなっています。それは、単純な作業工程であっても、ロボット導入には多くの労力がかかってしまうからです。 そこで …
2024/09/06
我々は、ロボット自身が周囲の環境を把握しながら、作業の進み具合に応じて、臨機応変に作業を行うことで、熟練のロボットエンジニアが不要となる(理想的には、現場に設置して10分程度で、ロボットが所望の作業を …

2024/04/08
我々は、食品の形状と味覚の関係を明らかにすることで、人々の食と味覚の体験をより豊かにしたいと考えています。食品の見た目が味覚に与える影響は以前から知られていましたが、具体的にどのような形状がどのような …

2024/02/16
OSXの研究グループについて紹介するシリーズ記事 第3弾では、PERCEPTIONグループが取り組むPath Planning(経路計画)の研究テーマを紹介します。 PERCEPTIONグループは …
2023/11/21
ロボティクス分野トップレベルの論文誌であるIEEE Robotics and Automation Letters(RA-L)に採録され、同分野トップカンファレンスである2022 IEEE/RSJ …
2023/08/08
コンピュータビジョン(Computer Vision: CV)分野の主要国際会議British Machine Vision Conference (BMVC) 2021で発表し、同分野トップジ …

2023/08/08
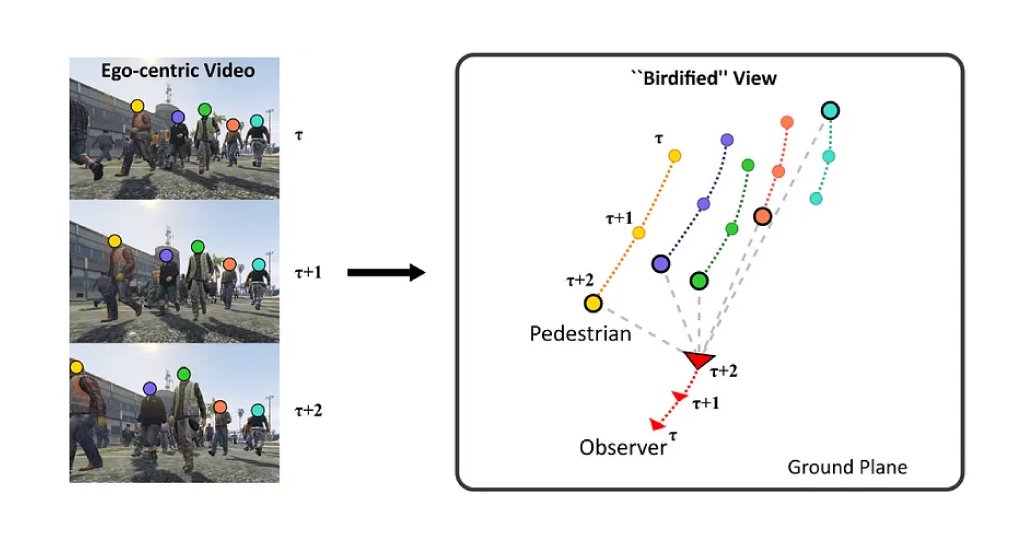
人混み環境の中で移動する人の動きを手掛かりに自己位置推定*1 *1: Mai Nishimura, Shohei Nobuhara, and Ko Nishino, “View Birdi …

2023/06/30
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS)で発表*1した、材料科学実験の自動化に向け …