2023/06/29
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS)で発表*1した、材料科学実験の自動化に向けたロボットによる粉体粉砕の研究について紹介いたします。こちらは、オムロン サイニックエックス(OSX)と大阪大学小野研究室(研究開始時は総合研究大学院大学)の共同研究成果です。
*1: Yusaku Nakajima, Masashi Hamaya, Yuta Suzuki, Takafumi Hawai, Felix von Drigalski, Kazutoshi Tanaka, Yoshitaka Ushiku, and Kanta Ono, “Robotic Powder Grinding with a Soft Jig for Laboratory Automation in Material Science,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2320-2326, Kyoto, Japan, Oct. 2022.
材料科学の分野では、スマートフォンやパソコンのディスプレイ、バッテリーなど、様々な素材の開発と機能解明に向けて研究が行われています。本研究では、ガラスやセラミックスなどの固体材料合成で重要となる、粉体粉砕作業の自動化を目指しています。従来、粉体粉砕は人手で行われており、多大な労力と時間を要していました。自動で粉体粉砕する機器も開発されていますが、材料科学実験で必要とされる数グラム程度の粉体粉砕や、粉砕のための力・速度・挙動など細かい条件の変更が困難である可能性があります。
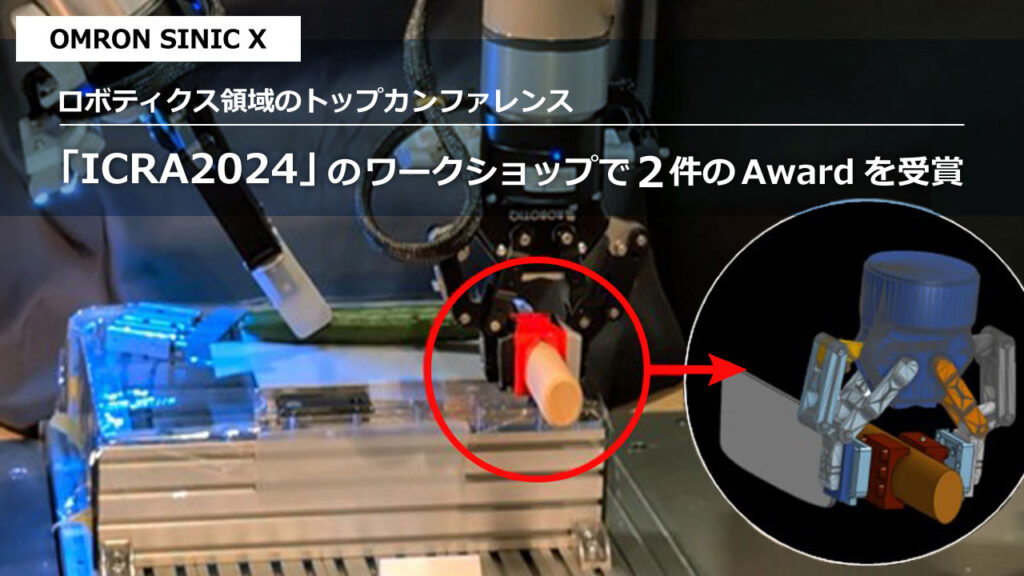
本研究では、材料科学に適した粉体粉砕ロボットシステムを提案しました。この実現のために、柔軟治具(Soft jig)と効率的な粉砕を実現するための画像処理と動作へのフィードバックシステムを開発しました(Fig. 1)。

Fig.1 Soft jig
(引用:ロボットによる粉体自動粉砕に関する研究をIROS2022で発表いたします)
Soft jigは粉砕作業中における乳棒と乳鉢の接触による過剰な負荷を吸収し、ロボットの故障や道具の損傷を避けることが期待されます。また、視覚フィードバックシステムは、カメラで乳鉢内の粉体の状態を認識し、粉体を集めるか粉砕を進めるかを自動的に判断し、粉体粉砕の効率を向上させることができます(Fig. 2)。
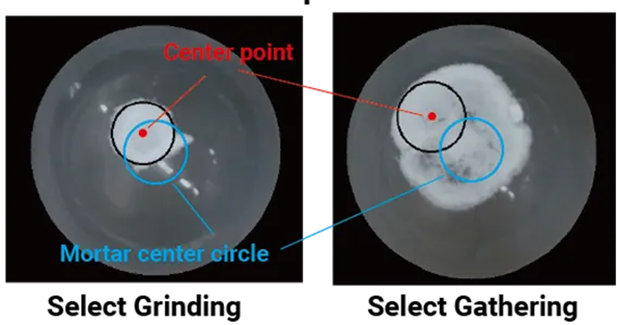
Fig.2 視覚フィードバックによる動作判断
(引用:ロボットによる粉体自動粉砕に関する研究をIROS2022で発表いたします)
本システムにより、人手による粉体粉砕作業の労力を大幅に削減でき、材料科学実験において研究者が本質的な研究に専念できるようになります。
 資料をダウンロード
資料をダウンロード
2023/06/29
2024/06/18
2023/11/21

2024/06/26