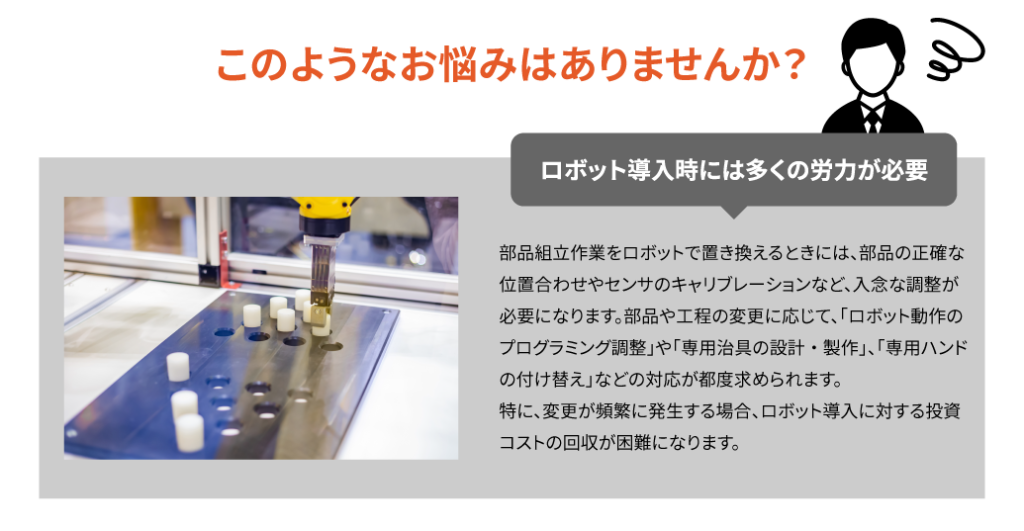
ロボットによる多品種少量生産を実現しようとしても、ロボット導入コストに見合わないケースが多くなっています。それは、単純な作業工程であっても、ロボット導入には多くの労力がかかってしまうからです。
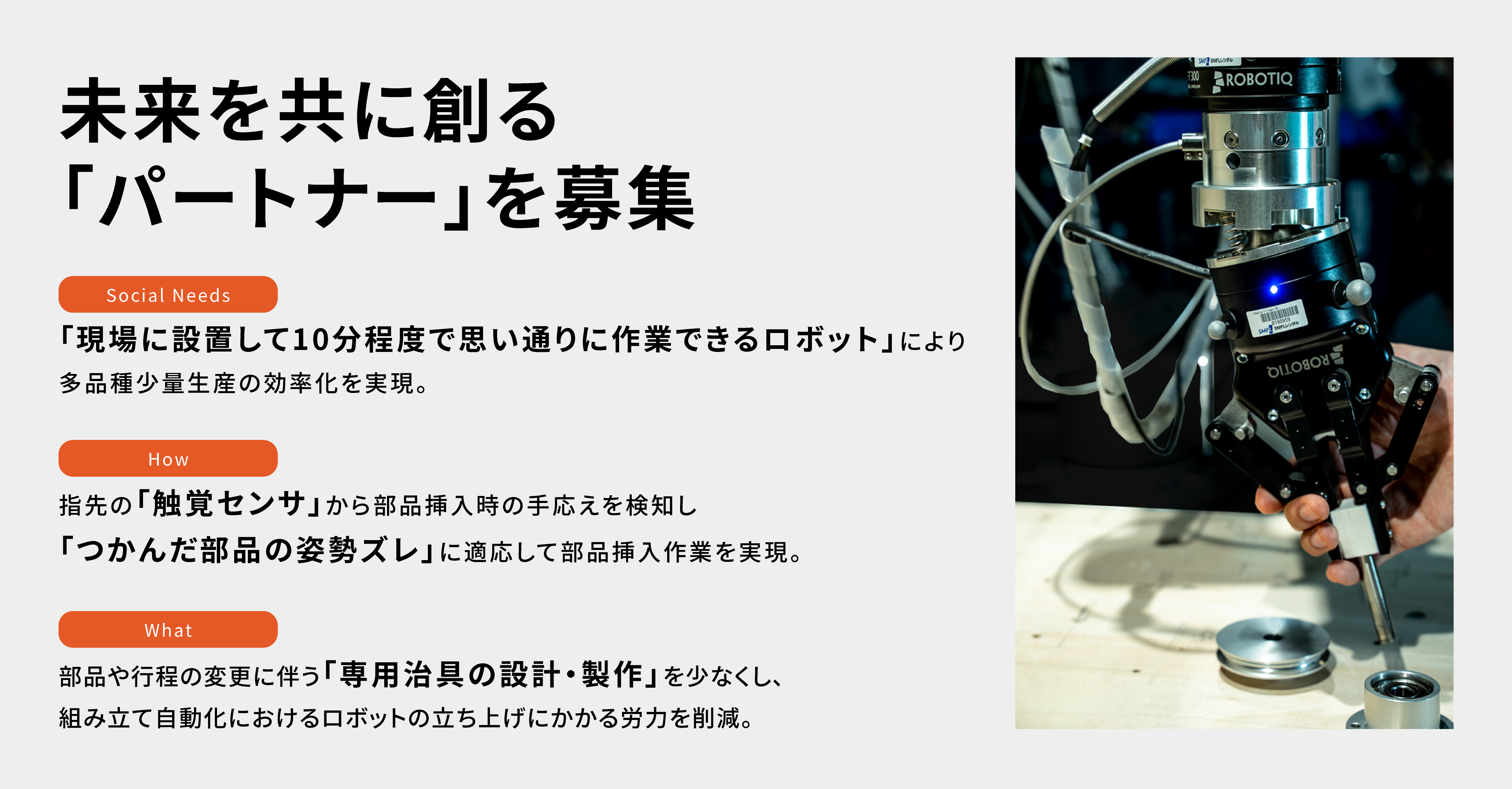
そこで我々は、ロボット導入コストの大幅な削減を目指し、現場に設置して10分程度で思い通りに作業できるロボット「Saguri-bot(サグリボット)」を研究しています。サグリボットは、「やわらかい手首」と「触覚センサを備えた指先」を持ち、「少ない試行での学習」をもとに動くことでロボット導入コストの大幅な削減を実現します。

Sim-to-Real 転移学習:Sim-to-RealはSimulation to Realの略称で、転移学習(異なるタスク・ドメインで学習した結果を、新たなタスク・ドメインに活用する機械学習)の一つです。シミュレーション(Simulation)で学習した事前知識を、実世界(Real)へ転移させて活用する技術です。実世界でのデータ収集における大幅なコスト削減が期待できる技術です。
今回の特集では、サグリボットの特長のひとつである「触覚センサを備えた指先」について紹介します。例えば、バラ積み状態の部品をロボットが無作為につかんだ時、その部品の姿勢にはバラツキ(姿勢ズレ)が発生します。そんな場合でも、部品挿入時に触覚センサから得られる手応えを検知することで、つかんだ部品の姿勢ズレに適応しながら部品挿入を実現できます*1。

部品がバラ積みされている様子
*1: Joaquín Royo Miquel, Masashi Hamaya, Cristian Beltran-Hernandez, and Kazutoshi Tanaka, “Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023).
特長1:つかんだ部品の姿勢ズレに適応
角度ズレ5度程度 (部品の直径10 mm)
角度ズレ20度程度(部品の直径10 mm)
特長2::追加学習なしで異なる部品に適用可能
直径10 mmの部品挿入を対象に事前トレーニングを実施するだけで、異なるサイズの部品(直径5, 15 mm)挿入にも対応することができます。
角度ズレ20度程度 (部品の直径5 mm)

角度ズレ20度程度 (部品の直径15 mm)
このようにサグリボットは、触覚センサを備えた指先が部品挿入時の手応えを捉えることで、多品種少量生産で頻繫する部品や工程の変更に伴う「専用治具の設計・製作」を少なくし、ロボット導入コストを大幅に削減できる要素技術です。
次回は、「現場に設置して10分程度でロボットが所望の作業を実行できる」を支える少ない試行で実現できる秘密をお届けします。
コラボレーション
我々は、柔軟な身体のロボットが力触覚を持ち、作業を学習する研究を進めています。我々のロボットは、生産ラインのように同じ動きをするのではなく、人が作業するような雑多な環境でも臨機応変に動くことができ、様々な手作業を代替できると期待しています。特に、今回ご紹介した「触覚を使用した部品挿入手法」は、やわらかい手首を持つロボットと組み合わせることで、人間のような探り動作が可能となります。その結果、つかんでいる部品の姿勢ズレや挿入する穴の位置にズレが生じる不確実環境下においても、本手法はロバストに部品の挿入作業を行うことができます。
ロボットによる自動化へのニーズや生産現場での課題感をお持ちの方々と、我々のロボット技術がどのように貢献できそうか、ぜひお話ししたいです。お気軽にご連絡ください。
Principal Investigator
濵屋 政志
 資料をダウンロード
資料をダウンロード
Download for free
share