2024/02/16
ロボティクス分野トップレベルの論文誌であるIEEE Robotics and Automation Letters(RA-L)に採録され、同分野トップカンファレンスである2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2022)にて発表した「連続時間での移動体ロードマップの事前アノテーション技術」について紹介します。
Fig. 1 シミュレーション結果
Prioritized Safe Interval Path Planning for Multi-Agent Pathfinding with Continuous Time on 2D Roadmaps
1. Kazumi Kasaura (OSX)
2. Mai Nishimura (OSX)
3. Ryo Yonetani (研究時所属:OSX、現所属:株式会社サイバーエージェント)
近年、倉庫や工場などの工業施設において、自律走行ロボット(Autonomous Mobile Robot: AMR)の導入が進みつつあり、物流や備品管理、生産ラインの支援などが実現されています。実際に、Amazon社の配送倉庫では約2000台ものAMRが稼働していると言われています 。比較的新しい工業施設ではロボットの大きさに合わせて、エリアや通路、ラック、机などを一定の間隔で配置することで、グリッドマップ(格子状に分割されたロードマップ)が事前に作成されています。複数のAMRを移動させる場合、AMR自身も障害物となるものの、グリッドマップに沿った移動を前提とすることで、AMR同士が衝突しない移動経路を生成できました。一方、これまでの工業施設は、AMR導入を想定して建設されておらず、グリッドマップでない場合が多いため、グリッドマップを前提に設計された従来手法は適用困難でした。
そこで、非グリッドマップにおける離散時間での経路計画のアルゴリズムがこれまで検討されてきました。離散時間の場合、1ステップ時間での計算となるため、各AMRの行動を同期しながら制御することができます。しかし、非常に多くのAMRの移動を実現するためには、それぞれが適切なタイミング(何秒、何ミリ秒・・・など)でスタートやストップを行えるように、大規模で複雑かつ非同期の制御が必要です。ゆえに、最適な経路を生成するためには、より連続的に(細かく)変化する時間上での経路計画のアルゴリズムが求められ、膨大な計算時間を要していました。
その問題を解決するため、本研究では以下①②を組み合わせた経路計画のアルゴリズムを提案しました。
①優先順位付き安全区間経路計画(既存手法)
②連続時間でのAMRのロードマップ上の衝突箇所と条件について事前アノテーション
まず既存手法にて、各AMRの優先順位を設定し、優先順位の高いAMRから経路を探索します。すでに経路探索されたAMRは移動障害物として扱いつつ、優先順位の低いAMRについても同様に経路を探索します。そのうえで、移動障害物とロードマップの衝突する/しないタイミングを全て調べ、その情報を考慮し経路を生成します。そして、本研究では、既存手法におけるAMR同士の衝突タイミングの計算を、連続時間でも計算可能にしました。特に、AMR同士が衝突するか否かは、各AMRのスタート時刻の差から判断できることに着目しました。具体的には、衝突が発生するスタート時刻の差のみを計算し、経路計画前にアノテーションしておきます。このアノテーション情報をもとに、経路計画における各スタート時刻を衝突が発生しないように調整することで、非常に多くのAMRに対しても連続時間での経路の生成を効率的に行えます。
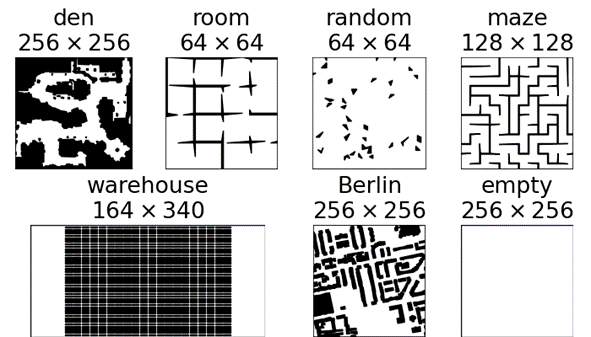
Fig. 2 実験で使用したシミュレーション環境
多くのロードマップ条件(Fig. 2)において、数百台から数千台規模のAMRに対する経路探索の計算時間を30秒以内で完了できることをシミュレーションにより確認しました。また、経路コスト*1の効率性についても既存手法と比較し遜色がないことを示しました。これらにより、適用したいロードマップさえ分かれば、現実的な計算時間で比較的妥当な経路を生成でき、その経路に基づいたAMRの運用を実現できます。
*1: 経路コストは、各AMRがスタート地点からゴール地点までの移動所要時間の総和で定義します。
本研究を応用することで、AMRの導入を想定してしない古い工業施設(倉庫や工場など)に対して複数台のAMRを新規に導入することや、スマートシティでの無人サービス(公共交通の完全自動運転化や無人店舗、無人清掃ロボット)などの実現にも貢献できると期待しています。
 資料をダウンロード
資料をダウンロード