2024/06/18

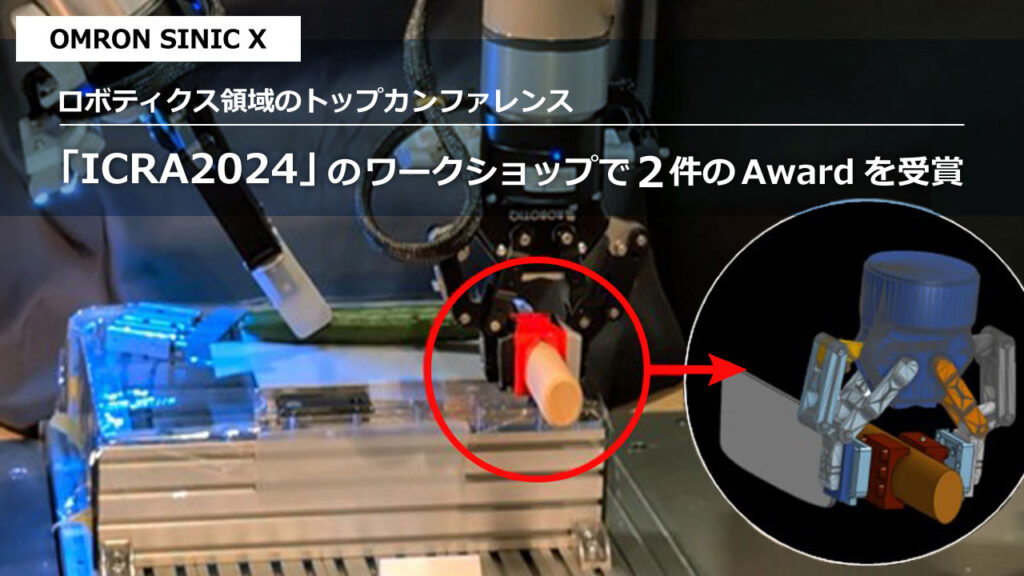
「2024 IEEE International Conference on Robotics and Automation (ICRA 2024)」に、弊社から6件の研究論文が採択されたことをお知らせします。
Keisuke Shirai (OSX), Cristian Camilo Beltran-Hernandez (OSX), Masashi Hamaya (OSX), Atsushi Hashimoto (OSX), Shohei Tanaka (OSX), Kento Kawaharazuka (The University of Tokyo), Kazutoshi Tanaka (OSX), Yoshitaka Ushiku (OSX), Shinsuke Mori (Kyoto university)
https://kskshr.github.io/vilain/
Yuni Fuchioka (OSX), Masashi Hamaya (OSX)
https://omron-sinicx.github.io/tactile-dipole-monent/
Cristian Camilo Beltran-Hernandez (OSX), Nicolas Erbetti (OSX), Masashi Hamaya (OSX)
https://omron-sinicx.github.io/sliceit/
Kohei Honda (OSX), Ryo Yonetani (OSX, 現所属: CyberAgent, Inc.), Mai Nishimura (OSX), Tadashi Kozuno (OSX)
https://omron-sinicx.github.io/when2replan/
Nguyen Hai (OSX), Tadashi Kozuno (OSX), Cristian Camilo Beltran-Hernandez (OSX), Masashi Hamaya (OSX)
https://omron-sinicx.github.io/symmetry-aware-pomdp/
Kazumi Kasaura (OSX), Shuwa Miura (OSX), Tadashi Kozuno (OSX), Ryo Yonetani (OSX, 現所属: CyberAgent, Inc.), Kenta Hoshino (Kyoto University), Yohei Hosoe (Kyoto University)
https://omron-sinicx.github.io/action-constrained-RL-benchmark/
詳細は、以下をご覧下さい。
https://www.omron.com/jp/ja/news/2024/05/c0510_2.html
各研究論文の技術紹介動画はこちらをご覧ください。
https://www.youtube.com/playlist?list=PL24svJxavZ7xg-gCCrhCD0htjNk3CtoDU
技術に関するご相談・OSXに関するご質問など、お気軽に下記よりお問い合わせください。
お問い合わせ
 資料をダウンロード
資料をダウンロード