Introducing Collaborative Research Results with Osaka University Presented at the Leading Robotics Conference “IROS 2022” – Automated Powder Grinding by Robots –
It is difficult to realize tasks with contact such as powder grinding in automation of material development with robotics.
How
We developed an automated powder grinding system for generating high-mix low-volume samples by integration of the soft jig and visual feedback.
What
Our system can significantly reduce the workload of humans and provides environments where researchers can concentrate on essential scientific experiments.
In this research, we introduce a study on robotic powder grinding for the automation of material science experiments, which was presented at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).1 This collaborative research is a joint achievement between OMRON SINIC X (OSX) and the Ono Laboratory at Osaka University (called the Graduate University for Advanced Studies at the time the research started).
1: Yusaku Nakajima, Masashi Hamaya, Yuta Suzuki, Takafumi Hawai, Felix von Drigalski, Kazutoshi Tanaka, Yoshitaka Ushiku, and Kanta Ono, “Robotic Powder Grinding with a Soft Jig for Laboratory Automation in Material Science,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2320-2326, Kyoto, Japan, Oct. 2022.
Research is being conducted in the materials science field to develop and gain functional understanding of various materials used in smartphones, computer displays, batteries, and other devices. This study aims to automate the process of powder grinding, which is important for synthesis of solid materials such as glass and ceramics. Conventionally, powder grinding has been performed manually, requiring significant effort and time. Although automated equipment for powder grinding has been developed, it may face challenges in handling the small quantities of powder, typically in the order of grams, required in material science experiments, as well as in making fine adjustments to parameters such as force, speed, and behavior for the grinding process.
In this study, we propose a robotic powder grinding system suitable for material science. To achieve this, we have developed a soft jig and an image processing and feedback system to enable efficient powder grinding (Fig. 1).
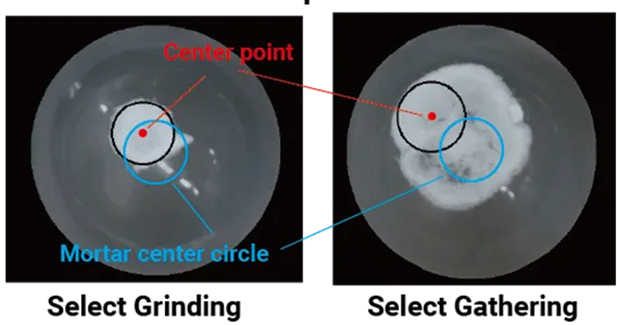
The soft jig is expected to absorb excessive loads caused by contact between the pestle and mortar during the grinding process, thereby preventing robot failures and tool damage. Additionally, the visual feedback system recognizes the state of the powder inside the mortar using a camera and automatically determines whether to gather the powder or proceed with the grinding, thereby enhancing the efficiency of powder grinding (Fig. 2).
This system significantly reduces the manual effort required for powder grinding tasks, allowing researchers to focus on the essential aspects of their material science experiments.