PLEXUS Hand
軽量・精密操作ができる 次世代ハンド型ロボット
PLEXUS Hand (Precision‒Lateral dEXteroUS manipulation hand) は、 わずか311gの軽量設計と4つの内蔵モーターで、 多様な把持動作と手の中で物を持ち替える「In-hand manipulation」を実現します!
The 19th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR 2025)にて発表
人間の親指の動きに着目したデザイン
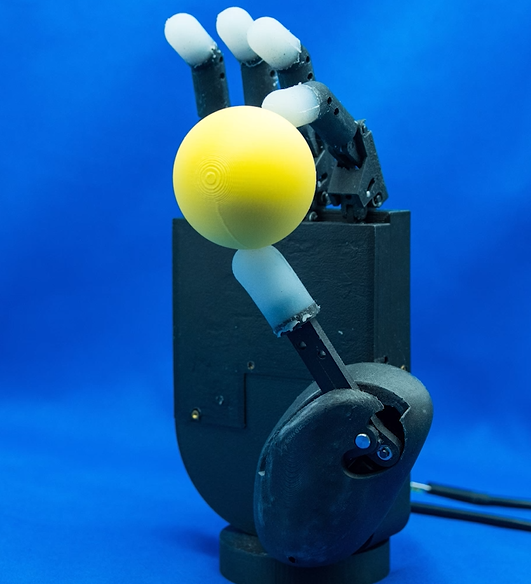
指先同士で繊細に『つまむ』持ち方から、 親指の指先と人差し指の側面で『挟んで固定する』持ち方への物体のシームレスな移行を可能にしました。
人間の親指の高度な動きを模倣することで、より複雑な操作を実現しています。
独自の「4モーター駆動」
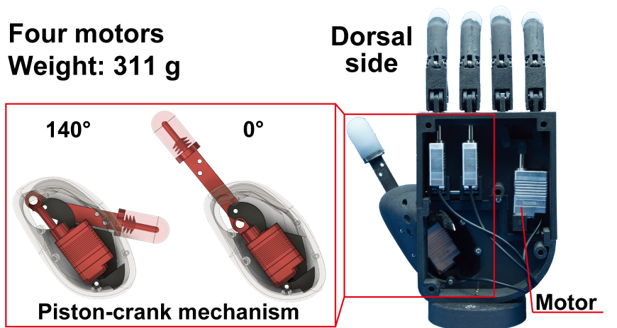
ロボットハンド特有の限られた内部スペースとモータ数という制限下で、 基本的な把持姿勢を使い分けて柔軟に対応しながら高い操作性を実現します。
これにより、様々な形状の物体を安定して把持し、精密な操作を行うことが可能です。
▶ テクノフロンティア2025 出展特設サイトは こちら
 資料をダウンロード
資料をダウンロード
Download for free
share