
どんな器からも自動ですくいとる新機構のロボットハンド
柔軟シートで器の形に自動フィット。粉体も粘性体も効率よくすくいとる
01簡単にシステム構築が可能

すくいとる動作を、センサレスで容易に実現可能
- 解決可能な課題
- ・システム構築に伴うセンサ導入コスト
・現場での複雑な設定作業
02柔軟性を有する変形シート
シートの柔軟性により、器にハンドを密着させたすくい取り動作が可能
- 解決可能な課題
- ・器とハンドの位置ズレによる作業失敗
・すくいとる対象を変更した時のハンド交換コスト
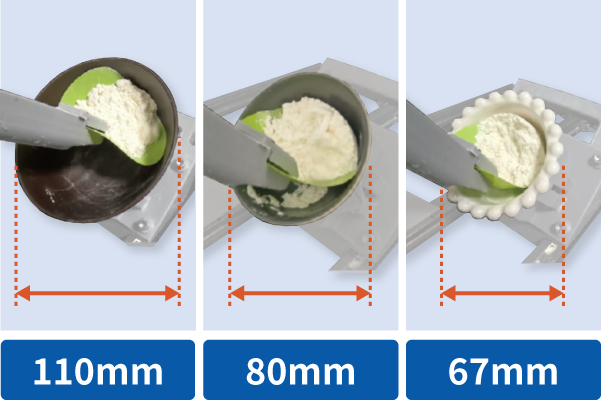
03変形シートのサイズ調整機構

円錐状にシートを変形できることで、多様な器のサイズに合わせてすくいとる動作が可能
- 解決可能な課題
- ・器サイズ別に複数ハンドを購入しなければならず、コストが増加
・器のサイズ変更時に手動の調整作業が発生
 カタログをダウンロード
カタログをダウンロード